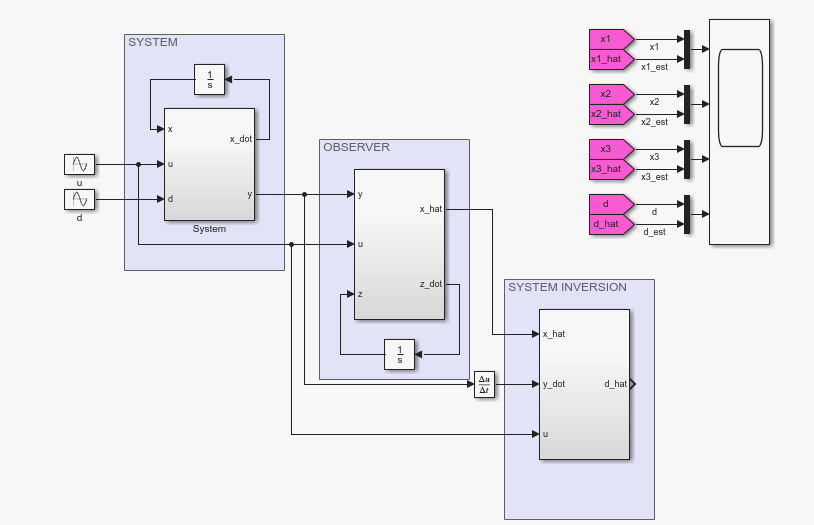
طراحی رویتگر برای هر سیستم دلخواه شبیه سازی در متلب :انجام پروژه متلب
طراحی رویتگر برای هر سیستم دلخواه شبیه سازی در متلب :پروژه شبیه سازی متلب
پروژه شبیه سازی متلب: با خرید این پروژه می توانیم برای هر سیستم دلخواه رویتگر یا تخمینگر مناسب را طراحی نمود.
رویتگرها از حیث تخمین متغیرهای داخلی سیستم به ویژه متغیرهای حالت، در طراحی سیستمهای کنترل جایگاه ویژهای دارند. طراحی رویتگر حالت در سیستمهای غیرخطی در مقایسه با سیستمهای خطی با پیچیدگیهای خاصی همراه است و این موضوع دلیلی بر ارائه طیف وسیعی از روشهای طراحی در چند دهه اخیر میباشد. رویتگر شبهلیونبرگر از جمله رویتگرهای کاربردی در سیستمهای غیرخطی با ویژگی رویتپذیری یکنواخت است که در طراحی آن معمولاً فرض لیپشیتز بودن تابع دینامیک سیستم در نظر گرفته میشود. در این رساله یک دستهبندی کلی از روشهای طراحی این رویتگر، تحت عنوان روشهای مستقیم و غیرمستقیم ارائه شده و مزایا و معایب هر یک بررسی میگردد. همچنین شرط لیپشیتز تعمیمیافته بر اساس ساختار بخش غیرخطی معادلات سیستم معرفی شده و بر اساس آن یک شرط لازم و کافی در پایداری معادله خطای رویتگر شبهلیونبرگر بدست میآید.
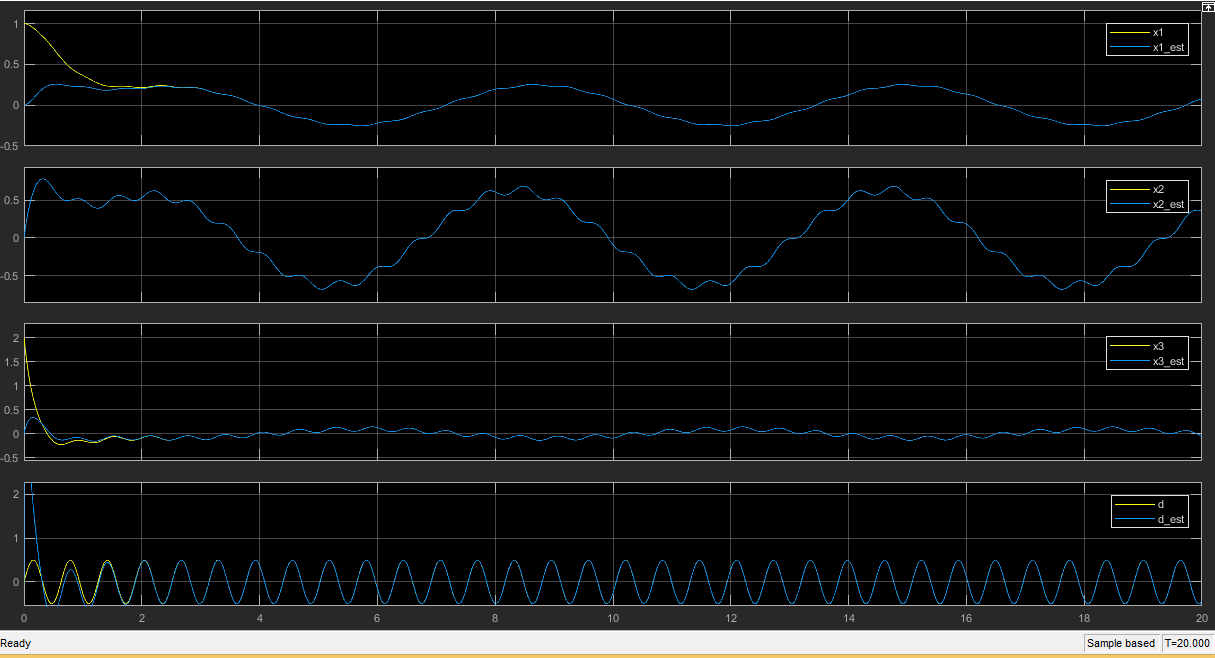
پروژه شبیه سازی متلب: بر مبنای این دو شرط، توصیف روشهای مختلف طراحی رویتگر امکانپذیر است و لذا یک چارچوب کلی در تحلیل و طراحی رویتگر شبهلیونبرگر ارائه میشود. چارچوب کلی طراحی در کاهش محدودیتهای روشهای طراحی موجود بکار گرفته شده است. علاوه بر این یک الگوریتم منظم در طراحی رویتگر شبهلیونبرگر ارائه میگردد که ضمن برخورداری از اغلب مزایای روشهای مستقیم و غیرمستقیم، قابل استفاده در دسته وسیعی از سیستمهای غیرخطی است. کاربرد این الگوریتم در طراحی رویتگرهای مرتبه کاهشیافته و رویتگرهای غیرخطی تطبیقی نیز بررسی شده است. نتایج شبیهسازی در بخشهای مختلف، اهمیت کاربردی مباحث مطرح شده را نشان میدهد.
– سیستم های کنترلی و دسته بندی آنها
- ۱۵ : مقدمه
– یک سیستم ، یک مجموعه از پیشنهادات و اجزای متصل یا مرتبط است که به وسیله برخی از اشکال منظم متقابل یا غیر وابسته ، یک مجموعه کلی را تشکیل می دهد و وظایف خاصی را انجام می دهند . این سیستم یک بازده را تولید می کند تا نیروی مصرفی تان را در یافت کند . ترمومتر( دماسنج) و سیستم مرطوب کننده یک منبع توده ای را می توان همانند یک سیستم در نظر گرفت . یک دما سنج یک نیروی مصرفی معادل X= ( دمای هوا ) و یک بازده y=1 ( طول ستون جیوه در جای خود ) دارد . در سلسله ترتیبی منبع توده ای ، نیرو و موقعیت توده مصرفی و بازده سیستم به همین شیوه محاسبه می گردد . در چرخش تولید کننده الکتریسیته ، میزان نیروی مصرفی به صورت یک سرعت چرخشی از تغییر حرکت – اولیه خواهد بود و بازده آن ، تولید ولتاژ در بخشهای پایانی یا واحدهای نیروی الکتریسیته است . عبارت کنترل به معنای قاعده – دستور و فرمان است . سیستم کنترل را می توان به این صورت تعریف کرد : ” مجموعه ای از علایم و اجزای متصل یا مرتبط تر همانند یک دستور ، فرمان یا قاعده برای یک سیستم دیگر است ” در سیستم کنترل یکسری از راهنماییها جهت به کارگیری یک سیستم ثابت وجود دارد که می تواند مطابق با برنامه از پیش تنظیم شده تغییر کند .
– ۱۵۰۲ : نمونه هایی از سیستم های کنترلی .
در زیر برخی از نمونه های سیستم های کنترلی روشن شده است .
تصویر ۱۵۰۳ : سیستم روشن – خاموش الکتریکی
(i)یک سویچ الکتریکی که جریان الکتریسیته را در مدار کنترل می کند . علامت نیروی مصرفی به صورت دستور خاموش یا روشن است و علامت باز ها جریان یا عدم جریان الکتریسیته است .
– تصویر ۱۵۰۴ : سیستم حرارتی : کنترل تغذیه ای دستی
(ii) یک سیستم حرارتی در جای مناسب است که دمای آب داغ را در شرایط مطلوب ثابت نگه دارد . قبل اجرا می توان این وظیفه را با موفقیت انجام داد و الزامات متعاقب را باید به این صورت در نظر گرفت :
- اجرا کننده باید بگوید که چه دمایی را برای آب نیاز دارد . این دما را نقطه تنظیم یا ارزش مورد نظر می نامند که نیروی مصرفی را در سیستم توزیع می کند .
- اجرا کننده باید برخی از موارد مربوط به دما را تأمین کند ( اجزای محسوس جهت مشاهده میزان دما ) . به همین منظور دماسنج یک علامت را در کنار آب داغ نصب می کند و میزان دمای واقعی آب با آن نشان داده می شود . این دما ، یک بازده از سیستم است و کنترل کننده متغیر نامیده می شود . اجرا کننده با مشاهده دماسنج می تواند بفهمد که دمای آب چقدر است و آن را با اندازه دلخواه خود مقایسه کند . این تفاوت میان ارزش ( مقدار ) مورد نظر و میزان دمای واقعی را یک سیگنال اشتباه می گویند : e=r-c در جایی که r مربوط به نقطه تنظیمی یا بازده مرجع وc نشان دهنده میزان کنترل قابل تغییر می باشد .
- اجرا کننده باید برخی از موارد متأثر از دما را تأمین کند ( اجزای کنترل کننده ) و باید دستورآن را برای انجام و رساندن دما به میزان مورد دلخواه و دستور مناسب آن را برنامه ریزی کند ( عملکرد کنترل ) .
علامت سیگنال اشتباه e نشان می دهد که آیا کنترل کننده دما خیلی بالا است یا خیلی پایین و این مسئله میزان عملکرد صحیح مورد نیاز را نشان می دهد که آیا کنترل مقدار آن را بازکرد یا بسته است .
میزان اشتباه ، حجم عملکرد ضروری درست را نشان می دهد : زمانی که این میزان با یک دستور درست به حجم صحیح خود رسید ، آب به ارزش دمایی مطلوب خواهد رسید .
در اینجا اجرا کننده باید قادر باشد تا میزان سیگنال اشتباه به حداقل ممکن کاهش دهد و سیستم ایجاد شده برای آب را تغییر دهد . جریان این روند در طول مسیر توزیع می شود .
- تصویر ۱۵۰۵ : سیستم تقسیم بندی شده خودکار
- (iii) سیستم تقسیم بندی شده خودکار ( شتاب دهنده – کاربراتور – موتور ماشین ) یک سیگنال دستوری دارد که نیروی شتاب دهنده پدال و سرعت خودرو را کنترل دارد . تغییر مطلوب سرعت موتور می تواند از طریق کنترل میزان فشار دارد به پدال شتاب دهنده ، به دست آید .
- تصویر ۱۵۰۶ : سیستم هدایت کننده اتومبیل
(iv ) سیستم هدایت خودرو در جایی که راننده نیاز به حفظ آن دارد ، از این طریق در مسیر ، ایجاد می شود . جهت اندازه گیری بازده ، مغز و دست ها در مقابل و خطای ایجاد شده میان نیروی مصرفی و سیگنال بازده ، عکس العمل نشان داده و طوری عمل می کنند که این میزان خطا یا اشتباه به صفر کاهش یابد .
- تصویر ۱۳۰۷ : سیستم کنترل بیولوژیکی : شخص به سمت نقطه مورد نظر می رود .
(v) سیستم کنترل بیولوژیکی در جایی است که شخص به طرف نقطه نشان داده شده و به سمت هدف می رود . سیگنال دستور ، یک موقعیت مثبت از هدف است و بازده آن به دستور به سمت آن نقطه واقعی است . دیگر نمونه های شناخته شدن از سیستم کنترل عبارتند از : سرخ کن های الکتریکی – ژیگلاتور فشار آب – سطح آب تانک توالت – اطوهای الکتریکی – خنک کننده ها – اجاق های خانگی با کنترل دما .
– ۱۵۰۳ : طبقه بندی سیستم های کنترل
پروژه شبیه سازی متلبدو نوع اصلی از سیستم های کنترل وجود دارد : سیستم های بازکننده حلقه و بستن حلقه ( حلقه- باز ) ( حلقه – بسته )
۱۵۰۳۰۱ : سیستم های حلقه باز ( سیستم کنترل غیر مانیتوری )
ویژگی های اصلی سیستم باز کننده حلقه عبارتست از :
- هیچ مقایسه ای میان ارزشهای واقعی و ارزشهای دلخواه قابل تغییر نمی توان انجام داد .
- بررسی و میزان نیروی مصرفی ، یک شرایط اجرایی ثابت ( بازده ) وجود دارد که این بازده هیچ اثری را برروی عملکرد کنترل ندارد و عملکرد کنترل مستقل از بازده است .
- جهت تنظیم – نیروی مصرفی ، ممکن است یک میزان متغیر از این مقادیر کنترل شود که این امر وابسته به شرایط مورد نظر دارد .
از آنجایی که هیچ تفاوتی میان ارزش دلخواه و بازده واقعی وجود ندارد پس تغییر سرعت را می توان در همان بازده انجام داد بدون اینکه تغییری در فشار خارجی وارد شودبرخی از نمونه های سیستم حلقه – باز عبارتند از :
- سعی کنید که یک ماشین را بوسیله تنظیم چرخ هدایت کننده راهنمایی کنید و الگوی متعاقب آن دستور را تغییر دهید البته در نقطه شروع آن و هیچ معیار متناوبی را در زمانی که ماشین به مسیر مورد نظر وارد شد ، ایجاد نکنید .
- به توپ گلف در جایی که بازیکن می داند هدفش است ، ضربه بزنید و توپ را به سوراخ مخصوص آن بیاندازید . جهت به دست آوردن این مسئله ، بازیکن باید توپ به طور درست در زمان شروع ، ضربه بزند . چند لحظه بعد او به مسیر رفته و بازیکن کنترل آن را از دست می دهد و توپ در نقطه مورد نظر پایین می آید .
- ماشین لباسشویی در جایی که آب به میزان لازم وارد ماشین شده است ، یک اجرا کننده را بر اساس زمان مطلوب ایجاد می کند .
ماشین سیگنال بازده را تعیین نمی کند و لباسها را می شوید .
(iv ) توستر اتوماتیک ( برشته کننده نان ) طوری است که می توان زمان توست و میزان دما را از پیش تعیین کرد . کیفیت توست ( تیرگی یا روشنی ) را می توان با استفاده از توستر مشخص کرد .
(v) علایم کنترل ترافیک خودکار در مسیرها نیز یک نمونه از سیستم حلقه – باز هستند . نور سبز و قرمز برای حرکت کردن ( بازده عملکرد کنترلی ) توسط یک مکانیسم زمانی محاسبه شده اجرا می شوند و مسیر ، پیچ شهری را بررسی میزان زمان ترافیک ( بازده ) ندارد .
سیستم های کنترل نشان داده شده در تصویر ۱۵۰۳ و ۱۵۰۵ نیز از سیستم های کنترل حلقه – باز هستند . سویچ الکتریکی سیستم کنترل به صورت مستقل از جریان جاری الکتریسیته در مدار ، عمل می کند . مثلاً رانندگی با اتومبیل هیچ ارتباطی را با سرعت ماشین و نیروی پدال ندارد .
جهت روشن شدن این مطلب باید گفت که هر سیستم کنترل کننده در یک زمان پایه خاص اجرا می شود و یک سیستم حلقه – باز است . یک سیستم حلقه باز دارای فواید و محدودیت های متعاقب است :
* راحت ایجاد کردن آن و آسان ثابت نگه داشتن آن
* بدون مشکلات ثابت
* راحت هستند در زمانی که کنترل کننده قابل تغییر ، به سختی اندازه گیری می شود و یا از لحاظ اکونومیکی میسر نمی باشند .
* سیستم متأثر از توزیع های درونی و بیرونی است و بازده ممکن است ضخامت از ارزش دلخواه باشد .
* نیاز به اندازه گیریهای داخلی دقیق و مکرّر جهت حصول نتایج درست ، دارد .
-۱۵۰۳۰۲ سیستم های حلقه- بسته ( سیستم های کنترلی مانیتوری )
ویژگیهای اصلی سیستم حلقه عبارتند از :
پروژه شبیه سازی متلب۱- یک میزان مقایسه ای میان ارزشهای دلخواه و میزان واقعی قابل تغییر وجود دارد .
جهت به انجام رسیدن آن ، سیگنال بازده به صورت یک حلقه ، کامل می شود .
۲- سیگنال اشتباه با استفاده از اجزای قابل کنترل ، میزان خطا را به حداقل می رساند و بازده سیستم را به حد ارزش مطلوب می رساند .
۳- سیستم اجرایی به طور مداوم هر خطای ایجاد شده را تصحیح می کند . به صورتی که بازده به میزان هدف مطلوب برسد و این مشابه با برخی از انواع سیگنال واقعی است .
حتی سیتم های حلقه – بسته ، مسیر بازده را به سمت هدف ، تغییر می دهد و این امر در رابطه با مزاحمت های خارجی و یا خود سیستم خراب شده می باشد . از این موارد جهت تشریح حلقه بسته و سیستم های کنترل کننده آن استفاده می شود . اجرای چنین سیستمی را می توان با برخی از ویژگیهای مطلوب مرجع ارزیابی کرد :
*حداقل تقسیم بندی متعاقب در توزیع
* حداقل زمان داخلی قبل از برگشت به نقطه – تنظیم شده
* حداقل خاموشی – تنظیم شده در رابطه با تغییر در شرایط اجرایی
نمونه هایی از سیستم حلقه – بسته عبارتند از :
پروژه شبیه سازی متلب(i)کنترل سیستم حرارتی ( تصویر ۱۵۰۴ ) یک حلقه بسته است .
در زمانی که اجرا کننده مشخص می کند که دمای بازده ، متفاوت از مقدار دلخواه یا دمای مرجع است ، شروع به انجام عملکرد کاهشی در اجرای مقادیری را می کند که بتواند با کنترل جریان ، آب را به میزان دلخواه گرم کند .
(ii) سیستم تقسیم بندی خودکار ( تصویر ۱۵۰۵ ) یک سیستم حلقه بسته است . زمانی که راننده ، نشاندهنده سرعت را نگاه می کند میزان ، سرعت را با سرعت دلخواه خود مقایسه می کند .
– تصویر ۱۵۰۸ : سیستم تقسیم بندی خودکار : کنترل کننده دستی
بر مبنای تفاوت میان ارزشهای ( مقادیر ) سرعت واقعی و سرعت دلخواه ، راننده می تواند سرعت را افزایش یا کاهش دهد . این تصمیم بر اساس میزان اثر متغیر فشار پای وی بر روی پدال هدایت کننده است . چشم راننده و عملکرد مغزی وی ، همانند نشاندهنده خطا هستند .
(iii) سیستم کنترل کننده ترافیک در راهها ، یک سیستم حلقه – بسته است . زمانی که پلیس راهنمایی و رانندگی اجازه می دهد که زمان – حرکت بیشتر از زمان – توقف باشد از یک دستور خاص استفاده می کند .
سیستم های حلقه بسته لیست شده در بالا که شامل یک کنترل کننده دستی مداوم توسط اجرا کننده انسانی هستند که به صورت سیستم های حلقه – بسته دستی می باشد . در بسیاری از سیستم های حرکتی سریع و پیچیده ، زمان فرض شده برای اجرای کنترل دستی توسط یک سیستم دیگر کنترل می شود که این امر ، نیاز به تجهیزات خاصی جهت اجرای عملکرد مطلوب نسبت به سرعت و تداوم آن ، داد. اجزای سیستم حلقه – بسته ، بدون انسان را سیستم کنترلی خودکار می نامند .
نمونه هایی از سیستم های کنترل خودکار
(i) در کنترل خودکار سیستم حرارتی ( تصویر ۱۵۰۹ ) ، اجرا کننده انسانی با کنترل کننده خودکار جابه جا شده است . دمای واقعی آب داغ ، توسط یک دما سنج اندازه گیری می شود و کنترل کننده آن را با میزان دلخواه مقایسه می کند و بعد یک دستور تنظیمی اجرایی را به ترموستاب و ژیگلاتور می دهد . بر مبنای سیگنال خطا ، کنترل کننده ، بازده را بر اساس ارزش کنترلی وارد شده تغییر می دهد و میزان جریان را بر اساس آن باز می کند .
– تصویر ۱۵۰۹ : سیستم حرارتی : کنترل برگشت پذیر خودکار
– تصویر ۱۵۰۱۰: سیستم کنترل سطح آب
– تصویر ۱۵۰۱۱: سیستم کنترل سرعت
– تصویر ۱۵۰۱۲: سیستم کنترل فشار
پروژه شبیه سازی متلب(ii) سیستم کنترل سطح نشان داده شده در تصویر ۱۵۰۱۰ یک سیستم کنترلی خودکار است که جریان داخلی آب را به سمت تانک بر اساس سطح آب موجود در تانک معین می کند .
کنترل کننده خودکار ، میزان مایع را توسط انجام یک مقایسه میان سطح واقعی و سطح مطلوب و دلخواه ، ثابت نگه می دارد و هر اشتباهی را توسط تنظیم میزان کنترل بازکننده ، تصحیح می کند .
(iii) هدایت کننده فرار از مرکز وات / Watt جهت استفاده برای سرعت خودکار چرخش توپها است . با ایجاد این جریان در کنترل سرعت به صورت اتوماتیک ، میزان تنظیم توپها است . با ایجاد این جریان در کنترل سرعت به صورت اتوماتیک ، میزان تنظیم شده ، کاهش یا افزایش می یابد .
(iv) سیستم کنترل فشار به صورت اتوماتیک میزان فشار اجاق را با تأثیر گذاری بر روی تغییر موقعیت مرطوب کننده ، کنترل می کند .
فواید و محدودیت های سیستم های کنترل خودکار عبارتند از :
* ثبات و تناسب در سیستم های عملکردی سریع و پیچیده بدون استفاده از تواناییهای فیزیکی انسان
* کمک به انسان جهت انجام کارهای فیزیکی سخت و خطرناک همراه با نتایج زمان با انجام یکسری کارهای مداوم و تکراری
* ارزش اجرایی اقتصادی در رابطه با حذف استخدام مداوم اجرا کننده انسانی
* افزایش بازده یا تولید
*اصلاح کیفی و کمی تولیدات
* صدمه اقتصادی در تجهیزات نیرویی و مراحل اجرایی با مواد خاص و اجازه برگشت به کنترل اولیه توسط استفاده مرتبط از اجزای ارزان قیمت .
* کاهش اثر غیر خطی و تعریف شده
* پاسخ دهی مطلوب در یک سطح وسیع به نیروی مصرفی مکرّر
این سیستم تمایل به تصحیح خطاها دارد و این امر ممکن است باعث برخی از تغییرات ثابت شود .
– ۱۵۰۳ : مجموعه اصطلاحات سیستم های کنترلی
یک حلقه بسته شامل یک مرحله – نشان دهنده خطا و اجزای کنترل کننده است . برخی از عبارات مرتبط با این اجزای پایه به صورت زیر تعریف می شود :
مرحله – دستگاه یا سیستم کنترل کننده : بخش ، مرحله یا دستگاهی که دارای کیفیت و شرایط خاصی است و کنترل می شود ، مانند اجاق ، راکتور یا فضاپیما و … غیره
* کنترل کننده قابل تغییر (C) » ویژگیهای یک موقعیت یا کیفیت خاص ( دما – سطح – جریان نسبی و غیره ) در یک مرحله ارزشی که به صورت ثابت توسط یک کنترل کننده نگه داشته می شود و یا مطابق با قانون خاصی ، تغییر می کند .
* کنترل کننده میانگین : مرحله مربوط به مواد خاص جهت کنترل سیستم یا جریان از طریق کنترل کننده قابل تغبیر .
* دستور : یک میزان بازده که به وسیله برخی از موارد خارجی یا مستقل از سیستم کنترل کننده ، ایجاد شده است و ممکن است تغییر نیز بکند .
* نقطه – تنظیمی یا بازده مرجع ( r ) : یک نقطه تنظیمی ثابت یا متغیر با زمان است که مطابق با برنامه موجود عمل می کند .
* انجام مهارتی قابل تغییر ( m ) : یک کیفیت یا شرایط خاصی است که همانند عملکرد سیگنال واقعی ، می تواند تغییر کند و ارزش متغیر کنترل کننده را نیز تغییر دهد . انجام مهارتی قابل تغییر ، یک دستگاه ایجاد شده توسط اجزای کنترلی است .
– تصویر ۱۵۰۱۳ : اجزای سیستم کنترلی
* سیگنال واقعی ( e ) : یک خلاصه جبری از بازده مرجع r و سرعت برگشت اولیه b است .
سیگنال واقعی را همچنین عملکرد کنترلی یا اشتباه نیز می نامند .
سیگنال برگشتی اولیه ( b ) : یک عملکرد کنترل شونده بازده c است که با بازده مرجع مقایسه شده و سیگنال واقعی را به دست می آورد .
* نمایانگر – خطا : یک عضوی است که میزان برگشت را نشان می دهد و به طور محسوس یک نقطه ای است که دو یا چند سیگنال جبری را به ما می دهد . دستور جریان اطلاعات توسط این ارقام جبری طبیعی و توسط علایم پالسی و دقیقه ای نشان داده می شود . میزان برگشت منفی ، زمانی ایجاد می شود که سیگنال برگشت از سیگنال مرجع منها شود :
e = r-b
اگر میزان سیگنال برگشت به سیگنال مرجع اضافه شود ، گفته می شود که میزان برگشت مثبت است :
e = r+b
میزان برگشت منفی سعی می کند که میزان خطا را کاهش دهددر جایی که میزان برگشت مثبت ، میزان خطارا افزایش می دهد .
* مزاحمت ( u ) : مقادیر قابل تغییر تا مطلوب در یک سیستم است که روند اثر گذاری بر روی مقادیر کنترل شده متغیر را به صورت غیر نا درست انجام می دهد . این مرحله مزاحمت ( آشوب ) ممکن است در رابطه با تغییراتی در نقطه تنظیمی ، تهیه ، تقاضا ، محیط و دیگر موارد قابل تغییر باشد .
* عضو برگشت پذیر ( h ) : یک عضو از سیستم کنترلی برگشت پذیر است که یک عملکرد مرتبط را میان مقدار کنترل شده قابل تغییر c و سیگنال برگشت b ، ایجاد می کند .
* عضو کنترل کننده : یک عضوی است که نیاز به تولید علامت کنترلی مناسب m دارد تا یک دستگاه را ایجاد کند .
* مسیر های برگشت و حرکت به جلو : یک مسیر قابل تغییر از سیگنال واقعی r به بازده کنترلی c است که یک مسیر رو به جلو را تشکیل می دهد . مسیر برگشت نیز یک متغیر از بازده کنترلی c به سیگنال برگشت اولیه b است .
۱۵۰۵ : مکانیسم سویسی ، مرحله کنترل ، تنظیم کننده ها
مکانیسم سرویسی دهنده ، یک سیستم کنترلی خودکار با قابلیت کنترل متغیر است که یک موقعیت مکانیکی و یک زمان قابل جابه جایی نظیر شدت و شتاب دارد . میزان بازده آن جهت تغییر مداوم بازده یا ارزش مناسب قابل تغییر طراحی شده است ( سیگنال تقاضا ) . مکانیسم های سرویس دهنده بسیار سریع عمل می کنند و از یکسری عملکردهای الکتریکی در این امر استفاده می کنند .
مکانیسم را خیلی سنگین و یا خیلی جزیی می کنند تا با یک کنترل دستی بتوان نیروی هدایت کننده را جهت کنترل چرخ ها ، تهویه هوا ، یا غیره ایجاد کرد . کامل کردن اتوماتیک ابزارهای ماشینی با دستورات برنامه ریزی شده ، نمونه ای از این مکانیسم های سرویس دهنده هستند .
مرحله کنترل کننده مربوط به کنترل پارامترهایی نظیر سطح – جریان – فشار و دمای قابل تغییر است . این پارامتر های خاص معمولاً یک ارزش مطلوب ( نقطه تنظیمی ) دارند و سیستم کنترل کننده نیاز دارد که مطمئن شود ، مرحله بازده در یک سطح متناسب با تغییرات شرایط بیرونی ( توزیع فشار ) ثابت شده است و برروی مرحله اثر می گذارد . فشار متراکم می تواند ( i ) یک تغییر در جریان فشار جوش باشد که متأثر از سیستم کنترل دما است . ( ii ) یک تغییری از اجزای اولیه ای باشد که متأثر از مرحله ترکیبی آن است . سیستم های کنترل کننده مرحله ای معمولاً عملکرد آهسته ای دارند و در زمان طولانی تری عمل می کنند .
تنظیم کننده ، یک سیستم کنترل برگشت است که میزان بازده ( مقدار کنترل شده قابل تغییر ) را در یک ارزش از پیش تنظیم شده بر اثر فشار خارجی بر دستگاه ، ثابت نگه می دارد . بازده مرجع یا سیگنال دستور قابل تنظیم است و می توان آن را برای یک مدت زمان طولانی ثابت نگه داشت :
وظیفه اولیه این است که میزان بازده را در یک ارزش مطلوب ثابت نگه داشت .
– مثال ۱۵۰۱ : ۳ مورد الکتریکی مورد استفاده در خانه را نام ببرید و با کنترل کننده های مناسب ، هر۳ رامجهز کنید و بعد هدف مورد نظر را به دست آورید . همچنین نوع طبقه بندی که کنترل کننده به آن تعلق دارد را نام ببرید .
راه حل : برخی از موارد متداول الکتریکی مورد استفاده در خانه عبارتند از :
- رادیو : فرد می تواند صدا – تن و ایستگاه آن را تنظیم کند .
- تلوزیون : فرد می تواند صدا – کانال و روشنایی آن را تنظیم کند .
- فر : فرد می تواند دمای آن را تنظیم کند .
در هر یک از این وسایل اجرا کننده انسانی بخشی از حلقه کنترل را انجام می دهد . او یک راه برگشت را ایجاد می کند ، تنظیمات را با کنترل کننده ها انجام می دهد و میزان خطا را درست می کند بنا براین یک اجرای مطلوب را شکل می دهد . این موارد الکتریکی یک سری از سیستم های کنترلی حلقه بسته دستی هستند . آتش الکتریکی و چراغها ، یک تنظیمات حلقه باز هستند زیرا میزان بازده انها را نمی توان تنظیم کرد و در راستای رسیدن به هدف مطلوب عمل می کنند . اگر آتش الکتریکی ، دارای گرمای کافی نباشد و یا لامپ به میزان کافی نور نداشته باشد ، می توان آن را با یک مورد جدید ، جایگزین کرد .
– نمونه ۱۵۰۲ : جوانب مربوط به پخت با حلقه – باز و حلقه – بسته را یکی کنید .
راه حل : اغلب پخت ها بر اساس یک سیستم حلقه – باز انجام می شوند ، زیرا :
- کیفیت عوامل آن به وسیله یک دستور آشپزی خاص ، ایجاد می شوند .
- ترکیبی از عوامل در هر دستورات
- تنظیم فر و زمان پخت مطابق با دستورات خاص است .
اگر هر عمل مطابق با دستور موجود در لیست کتاب آشپزی باشد ، هدف مطلوب به دست می آید .
اگر آشپز سعی کند که یک میزان برگشت کلی را به این مرحله اضافه کند و بر اجرای فر ، نظارت کند ، می تواند باعث اشتباه شدن برخی از عوامل شود .
اگر چه ، تجربه آشپزی در جهت موارد تنظیمی و دستورات حلقه – باز مورد استفاده قرار می گیرد که این امر نیاز به هدف ایجاد شدن بیشتری دارد .
کیفیت های مورد استفاده ، میزان دما و زمان پخت و غیره هستند که همگی مطابق با دستور کتاب آشپزی تنظیم می شوند تا هدف مورد نظر به دست آید .
– نمونه ۱۵۰۳ : عملکرد تغییر نور ، یک نمونه از کنترل دستی است یا خودکار ؟
راه حل : مرحله تغییر نور ، شامل هر دو نوع کنترل دستی و اتوماتیک است .
- عملکرد تغییر نور ، یک اجرای زمان است و به طور آشکار یک کنترل دستی است . شخص تصمیم می گیرد که نیاز به نور دارد و یا اینکه می خواهد آن را خاموش کند . به طور متعاقب اگر کلید آن خاموش شود ، پس نور مورد نیاز نبوده است .
- حباب یک شفافیت از پیش تعیین شده را می دهد ، این کار به طور اتوماتیک بر اثر کنترل دقیق لامپ انجام می شود و میزان ولتاژ را در یک حد ثابت نگه می دارد . پس لامپ میزان شفافیت را به صورت کامل ارایه می دهد . سیستم اجرایی در ایستگاه نیرو مطمئن است که ولتاژ ثابت شده ، نزدیک به ۲۴۰ ولت می باشد به جز در طول قطع نیرو .
– نمونه ۱۵۰۴ : مفهوم دستگاه ، نیروی مصرفی مرجع بازده کنترل شده و میمزان برگشت و غیره را در سیستم های کنترلی متعاقب تشخیص دهید :
(i) کنترل دما در سیستم گرمایی داخلی
(ii) کنترل سطح آب در مخزن آب
- کنترل پیشرفت اتوماتیک ماشین
- کنترل دمای آب برای دوش حمام
راه حل : a ) به تصویر ۱۵۰۱۴جهت سیستم گرم کننده مرکزی حلقه – بسته مراجعه کنید .
– تصویر ۱۵۰۱۴ : سیستم گرم کننده مرکزی حلقه – بسته
(۱)دستگاه مربوط به درجه حرارت اطاق را در حد مورد نیاز کنترل می کنند .
(۲) ترموستاب ، دمای مشخص شده را ( نیروی مصرفی مرجع ) تنظیم می کند و این کار باعث کنترل بازده نفت / سوخت در دیگ جوش می شود .
(۳) کنترل میزان بازده ، یک ارزش دردمای واقعی اطاق است که بر اساس ترموستاب برگشت داده می شود .
(۴) اجزای کنترل کننده ، یک ارزش خاص از جریان نفت است و هدف ، دمای خاص مورد نظر در خانه است .
کلید تغییر جریان ترموستاب بر روی جریان نفت در دیگ جوش ، زمانی است که میزان دمای اطاق به زیر مقدار ارزش مشخص شده ، می افتد . این نتایج ، باعث جریان گرما از رادیاتورها به اتاق می شوند و متعاقب میزان دما بالا می رود .
تأمین میزان سوخت مورد نیاز نیز به صورت اتوماتیک زمانی که دمای بالا می رود ، به میزان بازده مرجع خاص می رسد .
(b) به تصویر ۱۵۰۵ جهت کنترل سطح آب در مخزن مراجعه کنید .
– تصویر ۱۵۰۱۵ : کنترل سطح آب در مخزن
(i) دستگاه یک تانک ( مخزن ) است که در آن سطح آب کنترل می شود .
(ii) نیروی مصرفی مرجع ، از پیش توسط یک تنظیم اولیه از سطح – توپ معین شده است . این امر همچنین مربوط به سطح مایع در برخی از ارتفاعات از قبل مشخص شده در انتهای مخزن نیز می باشد .
(iii ) بازده یک سطح ثابت از آب در مخزن تانک است .
(iv) کنترل و اجراء مربوط به تنظیم محور ، توپ می باشد که میزان برگشت آن ، یک مموقعیت واقعی از توپ شناور است .
زمانی که توپ در یک موقعیت پایین تر است ( سطح آب زیر سطح مطلوب است ) ، آب به طرف مخزن جریان می یابد . با باز شدن جریان ، سطح آب بالا می آید و در نتیجه توپ نیز بالا می آید . توپ به سمت موقعیت بالا و حرکت می کند تا جایی که آب به میزان مطلوب برسد .
C ) به تصویر ۱۵۰۸ جهت کنترل پیشرفت اتوماتیک ماشین مراجعه کنید .
(i) دستگاه یک ماشین خودکار است که در طول مسیر خاص کنترل شده ، پیشرفت می کند .
(ii) نیروی مصرفی شامل چرخش هدایت کننده چرخ ها و فشار پا به پدال سرعت است .
(iv)حلقه برگشت ، حرکت ماشین را در طول راه با مشاهده راننده ، هدایت می کند . این میزان برگشت ، باعث ایجاد یک تغییر در فشار به پدال سرعت می شود و میزان اداره کننده چرخ را تنظیم می کند .
d )- تصویر ۱۵۰۶ جهت شرح یک تنظیم ساده برای کنترل حرارت دمای آب دوش حمام مراجعه کنید
تصویر ۱۵۰۶ : کنترل حرارت آب برای دوش حمام
(i) نیروی مصرفی ، میزان دما و جریان نسبی آب سرد و گرم است .
(ii) دستگاه ، یک لوله از آب به سمت بالا از سر لوله است .
(iii) بازده ، دمای آب داغ جریان یافته از سر لوله است .
(iv) اجزای کنترلی ، ترکیب شیر آب است .
(v) : بازوان شخص مورد نظر که دوش می گیرد ، زمان برگشت از بازده به نیروی مصرفی و تنظیمات ایجاد شده بر روی نیروی مصرفی را تعیین می کند . اگر میزان بازده خیلی داغ باشد ، او ترکیب کننده را به سمت موقعیت سر می چرخاند . اگر میزان آن خیلی سرد باشد ، او ترکیب کننده را به سمت گرم می چرخاند . تنظیمات به طریقی ایجاد می شود که تفاوت میان دمای بازده واقعی و دمای بازده مطلوب به میزان حداقل ، کاهش یابد .
خروجی برنامه :

لطفاً براي ارسال دیدگاه، ابتدا وارد حساب كاربري خود بشويد