تیون کردن کنترلر pid با روش Zeigler-Nicholas Method :پروژه متلب
تیون کردن کنترلر pid با روش زیگلر نیکولز Zeigler-Nicholas Method :پروژه متلب
پروژه آماده متلب: اصولاً کنترلرهای دمایی وظیفه مقایسه مقدار دمای واقعی فرایند انجام شده با مقدار مطلوب(ست پوینت) و همینطور فرمان به هیتر جهت تنظیم دما را دارند.
در کنترلرهای سنتی ترموستات های مکانیکی و یا الکترونیکی تنها با قطع و وصل کردن در محدوده set، دما را کنترل می کنند. حالا میخواهیم خیلی دقیق تر بدانیم کنترلر PID چیست؟
با ظهور میکرو کنترلرها و استفاده متنوع از آن در صنایع، روش های نوینی جهت کنترل دما طراحی شده است که یکی از مهم ترین و به روز ترین این روش ها “PID کنترلر” می باشد.
PID کنترلر (Proportional- Integral-Derivative controller) با استفاده از سه متغیر تناسبی، انتگرال و مشتق گیر، دما را کنترل می کند که کمک به سزایی درثبات حرارتی و یکنواخت گرم شدن محفظه می کند.
در این روش پارامترهایی مانند فراجست (overshoot) و نوسان دما (temperature variation) بسیار کاهش و دقت در تنظیم دما بهبود قابل توجهی دارد.
کاربردهای متداول کنترلر PID:
پروژه آماده متلب: در دستگاه آون آزمایشگاهی و کوره آزمایشگاهی که در فرایندهای حرارتی صنعتی مورد استفاده می باشند، لازم است به نتایج سازگاری، صرف نظر از اینکه چگونه جرم و رطوبت مواد درحال گرم شد ممکن است تغییر کند، دست یابیم. در اینگونه موارد استفاده از تجهیزات کنترل PID، ایده آل است.
علاوه بر فرایندهای گرمایی، در سیستم های کنترل میزان جریان سیالات، کنترل سیستم های حرکتی و موارد دیگر، PID کنترلرها بسیار پرکاربرد و مفید می باشند.
نمودار PID کنترلر نمودار سیستم های سنتی
فرایندهای گرمایشی نمونه ای از نیاز به کنترلرPID هستند. برای اطمینان از کیفیت پایدار محصول، دمای داخل محفظه دستگاه (chamber) می بایست در یک محدوده باریکی نگه داشته شود. زمانی که یک محصول اضافه و یا خارج شده است و یا هنگامی که شیب حرارتی اعمال شود، اختلالی در روند کار ایجاد می شود که باید به طور دقیق مورد توجه و کنترل قرار گیرد.
پروژه آماده متلب: اگرچه مفهوم PID به ظاهر ساده می رسد، اما زیربنای محاسبات کنترل PID پیچیده و دستیابی به عملکرد مطلوب، مستلزم تعیین مقادیر فرایندهای خاص برای طیف وسیعی از پارامترهای تاثیرگذار بر هم است.
فرایند یافتن این مقادیر، تیونینگ (tuning) نام دارد. هنگامی که کنترلر حرارت PID به طور مطلوب tune شود، انحراف از نقطه تعیین شده (set point) به حداقل رسیده و به عوامل ایجاد اختلال و یا تغییرات نسبت به set point ، با حداقل فراجست (overshoot) ، سریعاً پاسخ خواهد داد.
این مقاله چگونگی tune کردن یک کنترلر PID را معرفی می کند. با اینکه بسیاری از کنترلرها توانایی tune کردن اتوماتیک را دارند، فهم نحوه tuning ، در به دست آوردن عملکرد مناسب کمک می کند.
عملکرد پایه کنترلر PID
پروژه آماده متلب: کنترل PID بر اساس بازخورد (feedback) عمل می کند. خروجی یک دستگاه یا یک فرایند مانند آون، اندازه گیری و با یک هدف یا set point مقایسه می شود. اگر اختلافی شناسایی شود، میزان اصلاح محاسبه و اعمال می شود. خروجی دوباره اندازه گیری و هر گونه اصلاح مورد نیاز مجدد محاسبه می شود.
PID شامل سه جزء تناسبی (proportional)، انتگرال (Integral) و مشتق گیر (Derivative) می باشد. همه کنترلرها از هر سه این توابع ریاضی استفاده نمی کنند. بعضی از فرایندها را می توان در سطح قابل قبولی تنها با توابع تناسبی و انتگرال گیر کنترل کرد.
با این حال یک PID کنترلر دما خوب و بدون overshoot نیازمند اضافه شدن تابع مشتق گیر است. ( توجه داشته باشید به همین دلیل است که در بسیاری از کنترلرها با وجود اینکه از پردازنده جهت کنترل دما استفاده می شود، همچنان مقداری نوسان و یا فراجست دمایی دیده شده و بطور کامل ثبات حرارتی ایجاد نمی کنند.)
پروژه آماده متلب: در کنترل تناسبی ضریب تصحیح با میزان اختلاف بین set point و مقدار اندازه گیری شده، تعیین می شود. اشکال در این است که این تفاوت به صفر نزدیک می شود و برای اعمال اصلاح با توجه به نتیجه، خطا هیچ وقت صفر نمی شود.
تابع انتگرال این طور عمل می کند که با در نظر گرفتن میزان خطا، هر چقدر تفاوت set point با مقدار اندازه گیری شده بیشتر باشد، ضریب تصحیح بزرگتری محاسبه می شود.
البته وقتی تاخیر در پاسخ به اصلاح وجود داشته باشد، overshoot ایجاد می شود و احتمالاً منجر به نوسان نسبت به نقطه تنظیم می شود. اجتناب از این اتفاق، هدف تابع مشتق گیر است.
تنظیم کنترلر PID به روش زیگلر-نیکولز
پروژه آماده متلب: هر فرایندی دارای ویژگی های منحصر به فردی است. حتی وقتی تجهیزات در اصل و پایه یکسان باشند. جریان هوا در اطراف آون متفاوت خواهد بود، دمای محیط ممکن است تغییر کند، چگالی هوا و فشار هوا ممکن است ساعت به ساعت تغییر داشته باشد و یا حتی نوع بارگذاری و تعداد دفعاتی که نیاز است درضمن کار درب دستگاه باز شود. بنابراین تنظیماتی برای PID باید انتخاب شوند که با این تغییرات محیطی و تنوع در استفاده وفق پیدا کند.
به طور کلی سه رویکرد برای تعیین یک ترکیب بهینه از این تنظیمات وجود دارد:
- تنظیم هوشمند (Tuning heuristics)
- تنظیم خودکار (Auto tune)
- تنظیم دستی (Manual Tuning)
غالباً فرایندها بسیار پیچیده هستند اما با برخی از اطلاعات، بخصوص در مورد سرعتی که با آن به اصلاح خطا پاسخ داده می شود، این امکان وجود دارد که یک سطح ابتدایی از tuning به دست آید.
تنظیم هوشمند PID کنترلر (Tuning Heuristics)
پروژه آماده متلب: برای پاسخ به این پرسش که چطور یک حلقه PID تظیم (tune) شود، قوانین زیادی در طول سالها به وجود آمدند. احتمالاً اولین و قطعاً شناخته شده ترین آنها، قانون Ziegler-Nichols (ZN) است.
زیگلر و نیکولز دو روش برای Tune کردن حلقه کنترلر PID توضیح دادند که برای اولین بار در سال ۱۹۴۲ منتشر شد.
- روش اول: شامل انداره گیری عقب افتادگی یا تاخیر در پاسخ و سپس زمان صرف شده برای رسیدن به یک مقدار خروجی جدید است.
- روش دوم: بستگی به زمان رسیدن به حالت پایدار نوسان (steady-state oscillation) است. در هر دو این روش ها، مقادیر بدست آمده، برای محاسبه مقادیر gain، reset time و rate، در یک جدول وارد می شود.
پروژه آماده متلب: روش ZN بدون مساله نیست. در برخی از برنامه ها پاسخی ایجاد می کند که از نظر over shoot و نوسان تهاجمی محسوب مشود. مشکل دیگر این است که در فرایندهایی که به آرامی واکنش می دهند، می تواند وقت گیر باشد.
به این دلایل بعضی از افرادی که روی سیستم کنترل کار می کنند، قوانین دیگری مثل Tyreus-Luyben یا Rivera, Morari and Skogestad را ترجیح میدهند.
تنظیم خودکار PID کنترلر (Auto Tune)
پروژه آماده متلب: کنترلرهای زیادی امروزه به فروش می رسند که بصورت خودکار Tune می شوند. جزئیانت عملکرد بین تولید کننده ها، متفاوت است اما همه قوانینی را دنبال میکنند که پیش از این توضیح داده شد.
اساساً کنترلر ” می آموزد ” که چطور فرایند به یک اختلال یا تغییر در set point پاسخ دهد و تنظیمات PID کنترلر مناسب را محاسبه کند.
در مورد یک کنترلر گرما وقتی Auto Tune (تنظیم خودکار) انتخاب می شود، کنترلر یک خروجی را فعال می کند. با مشاهده Delay و Rate که با آن تغییر رخ می دهد، تنظیمات P، I و D مناسب، محاسبه می شود و حتی درصورت نیاز امکان تنظیم دستی دقیق نیز وجود دارد.
( توجه داشته باشید که این کنترلر نیاز به نقطه تنظیم حداقل ۱۰ درجه سانتیگراد بالاتر از دمای فعلی برای انجام تنظیم خودکار دارد.)
کنترلرهای جدیدتر و پیچیده تر، ترکیبی از منطق فازی با قابلیت تنظیم خودکار هستند. این یکی از راه های مقابله با عدم دقت و غیر خطی بودن را فراهم می کند.
درک PID تیونینگ (Tuning):
PID کنترلر برای مدیریت بسیاری از فرایندها استفاده می شود. فاکتورهای اصلاح، با مقایسه مقادیر خروجی نسبت به نقطه تعیین شده (set point) و همچنین با استفاده از بهره (gain)ای که over shoot و نوسان را به حداقل برساند، محاسبه می شود. در عین حال این تغییرات موثر در سریعترین زمان خود اعمال خواهند شد.
پروژه آماده متلب: تیونینگ PID شامل ایجاد مقدار بهره مناسب جهت کنترل پروسه می باشد. در حالی که این عمل میتواند به صورت دستی و یا استفاده از فن آوری هوشمند (Heuristics) انجام شود، اکثر کنترلرهای مدرن قابلیت تنظیم خودکار (Auto Tune) را ارائه می دهند.
با این حال، برای کنترل حرفه ای، درک آنچه پس از فشار دکمه اتفاق می افتد، بسیار مهم است.
روش زیگلر نیکولز
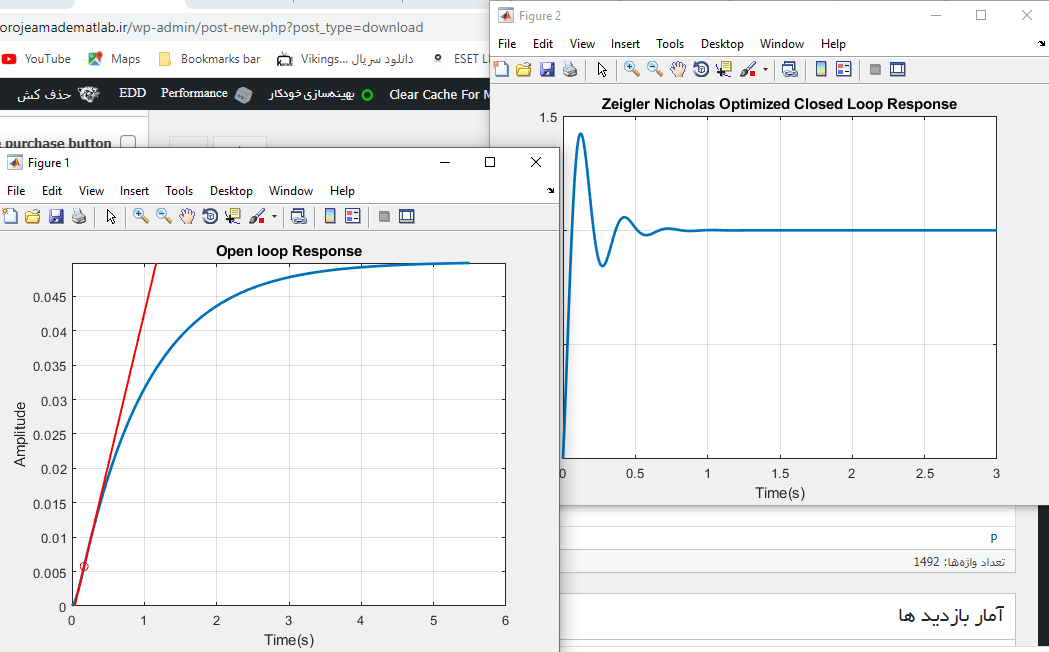
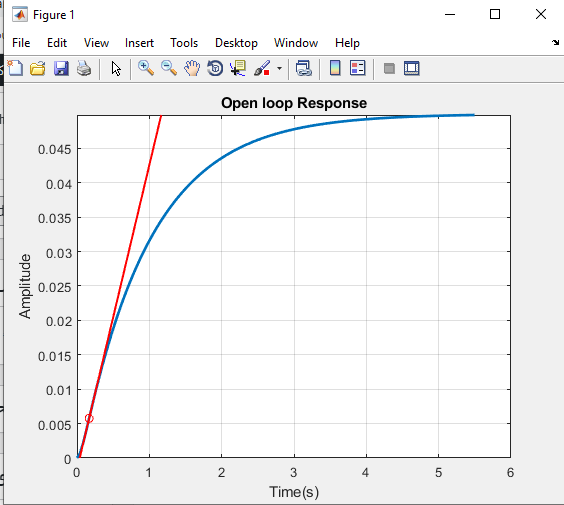
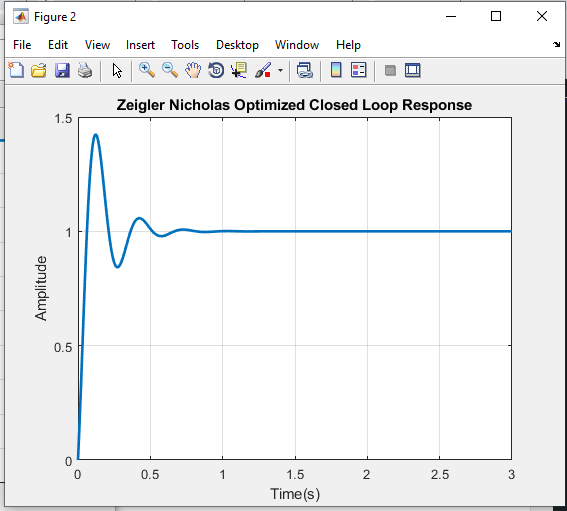
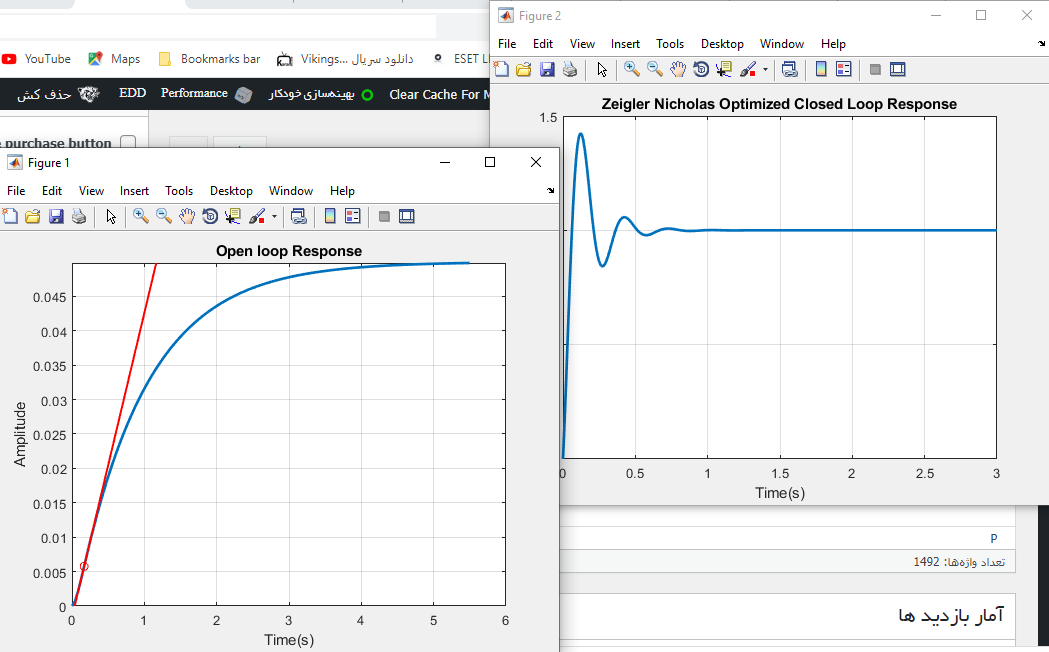
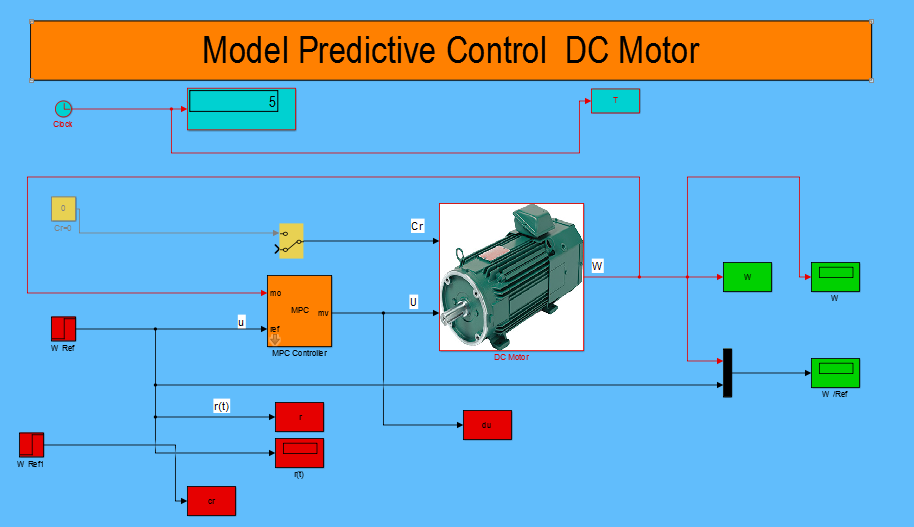
پروژه آماده متلب: روش زیگلر نیکولز (Ziegler–Nichols method) یک روش تجربی برای به دست آوردن پارامترهای PID ، PD و P می باشد. روش های تعیین ضرایب زیگلر نیکولز به دو دسته شامل تعیین توسط سیستم حلقه باز و تعیین بوسیله سیستم حلقه بسته صورت می گیرد. در این پروژه از روش سیستم حلقه بسته جهت به دست آوردن ضرایب PID استفاده می شود. برای استفاده از سیستم حلقه بسته، باید در مرحله اول بلوک های مشتق گیر و انتگرال گیر را از مدار جدا کرد و در بین بلوک کنترلی مدار فقط بلوک تناسبی برقرار باشد. در مرحله دوم، باید ورودی پله را اعمال کنیم و از مقادیر کوچک Kc شروع کرده تا زمانی که نمودار خروجی نوسانی شود.
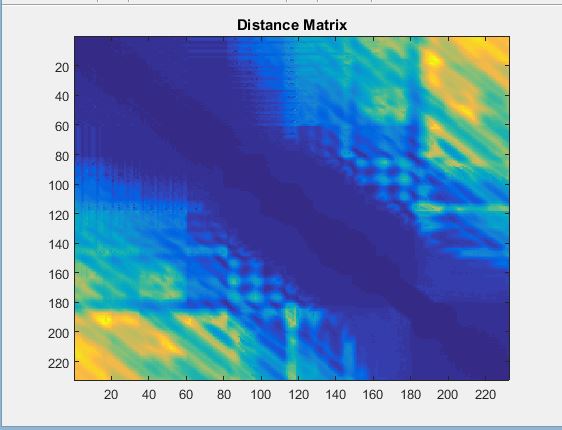
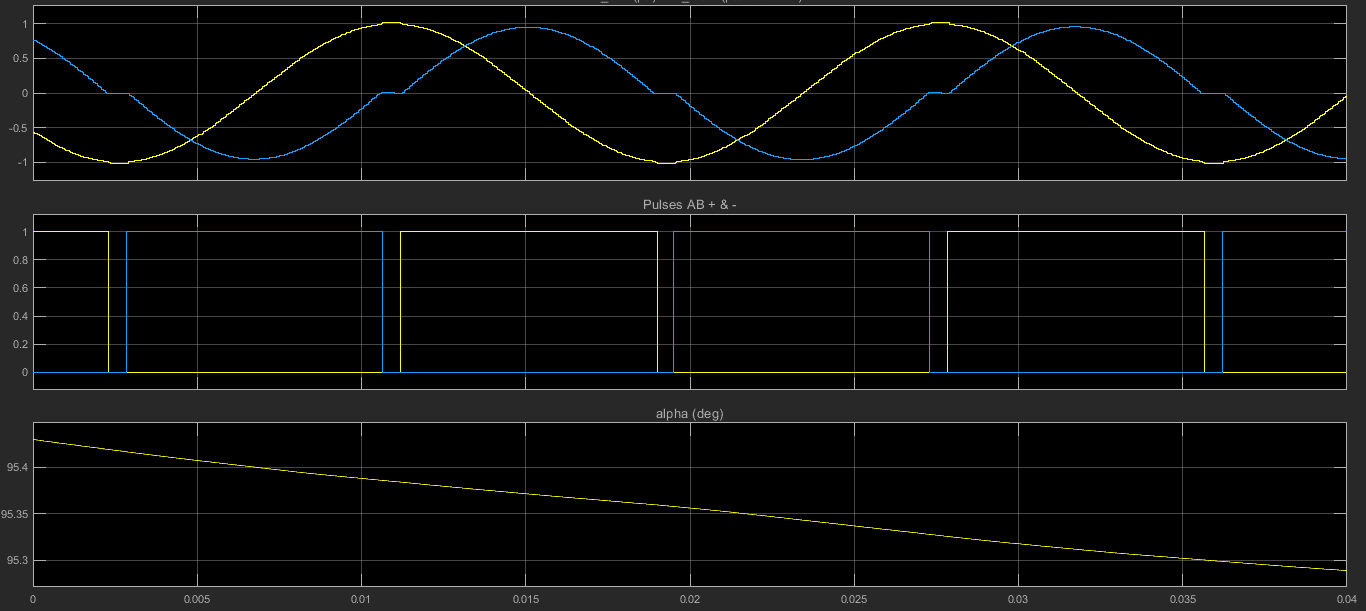
خروجی متلب :

لطفاً براي ارسال دیدگاه، ابتدا وارد حساب كاربري خود بشويد