تشخیص تصویر زبرا (گورخر) در متلب با بینایی ماشین
تشخیص تصویر زبرا (گورخر) در متلب با بینایی ماشین :پروژه متلب
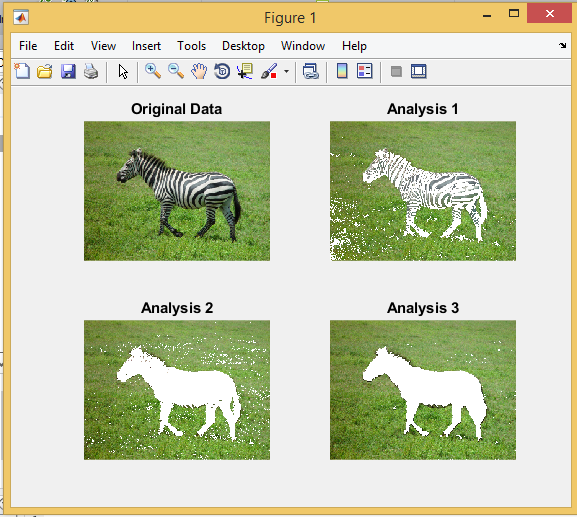
پروژه متلب : یکی از مسائل مهم و درحال توسعه در پردازش تصویر و بینایی ماشین ، مسألۀ ردیابی اشیاء است .
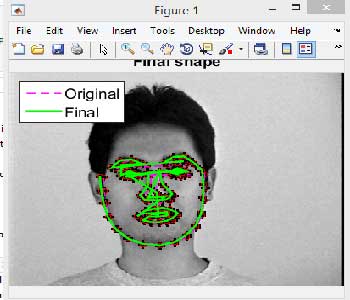
در این پروژه به کمک پردازش تصویر و بینایی ماشین تصویر گورخر شناسایی و از تصویر بریده می شود.
پروژه متلب :در واقع ردیابی اشیاء، نمایش تغییرات موقعیت یک شئ و دنبال کردن آن در یک دنبالۀ تصاویر ویدیویی، با یک هدف خاص میباشد. اگر چه سابقۀ ایجاد پدیده ردیابی اشیاء به مسائل نظامی بر میگردد ولی امروزه به دلیل کاربردهای بسیار گسترده ردیابی اشیاء در زمینه های مختلف این مقوله و جوانب مختلف آن در سالهای اخیر (عمدتاً از ١٩٨٠ به بعد ) مورد توجه ویژه ای قرار گرفته است .در این پروژه درباره نحوه تشخیص اشیاء ،ردیابی و روشهای تخمین حرکتی صحبت شده است .
) مقدمه
پروژه متلب : یکی از مسائل مهم و درحال توسعه در پردازش تصویر و بینایی ماشین ، مسألۀ ردیـابی اشـیاء است . در واقع ردیابی اشیاء، نمایش تغییرات موقعیت یک شـئ و دنبـال کـردن آن در یـک دنبالـۀ تصاویر ویدیویی، با یک هدف خاص میباشد.
١-٢) سابقه
پیشینه ایجاد پدیده ردیابی اشیاء به مسائل نظامی بر میگردد، در واقع مسائلی چـون هـدف یابی مخصوصاً اهداف متحرک، ردیابی مسیر موشک شلیک شده برای اطمینان از صحت عمل هدف گیری و یا ردیابی مسیر موشک شلیک شده از سوی دشمن برای جلوگیری از اصابت آن به هدف و یا هدف گیری موشک دشمن در آسمان و مسائلی از این قبیل باعث پدید آمدن یک مقولۀ جدید به نام ردیابی اشیاء در زمینۀ پردازش تصاویر نظامی گردید. این مقوله و جوانب مختلف آن در سالهای اخیر (عمدتاً از ١٩٨٠ به بعد ) مورد توجه ویژه ای قرار گرفته است .
١-٣)کاربردها
پروژه متلب : امروزه به دلیل کاربردهای بسیار گسترده ردیابی اشیاء در زمینه های مختلف به جزء زمینـه های نظامی مانند زمینه های اکتشافی در حوزه هوانوردی، فشرده سـازی هوشـمند ویـدئو، مراقبـت ویدئویی، کنترل مبتنی بر بینایی ماشین ، ارتباط مفهومی کامپیوتر با انسان ، تصویربرداری پزشکی و رباتیک ،زیر سطحی، زیر دریا، تعیین مسیر حرکت دسته های پرندگان یا گله های ماهی و…، زمینه های پزشکی مانند ردیابی مسیر دارو و یا حتی اشیاء خارجی قرار داده شده در بدن و بسیاری زمینه های دیگراز جمله جوانب مرتبط با مقوله ردیابی اشیاء، ارائه الگوریتمهایی است که در مقابل پدیـده هایی چون تغییر روشنایی١ محیط ، همپوشانی٢ اشیاء، عدم حرکت اشـیاء بـا سـرعت ثابـت و یـا در راستای یک خط مستقیم و … از پایایی کافی بر خوردار بوده و حتی الامکان قابـل پیـاده سـازی در کاربردهای بی درنگ ٣ باشند.
ارائه چنین الگوریتمهایی در درجه اول نیاز به مطالعه و تحقیق کافی در مورد چگونگی و انواع حرکتهای اشیاء و مفاهیم مرتبط با آنها، انواع روشهای شناسایی حرکت و تخمین حرکت و مزایـا و معایب این روشها نسبت به یکدیگر، مسألۀ حرکت نسبی شئ ، دوربین ، بیان توابع ، روابط ریاضی و هندسی ای که این حرکات را در قالب پارامترهای ریاضی قابـل تعیـین و تخمـین میـسر سـازد و
همچنین نحوه پارامتری کردن محیط حرکت و شناخت این مسأله و روشهای فائق آمـدن بـر ایـن مشکلات در ردیابی و … دارد.
روشهای تخمین حرکت دو بعدی بر پایه ویژگی
پروژه متلب : در روشهای مبتنی بر ویژگی نخست مشخصاتی از شئ یا اشیائی که باید ردیابی شوند یـا حرکـت آنها تخمین زده شود، در نظـر گرفتـه مـیشـود کـه ایـن مشخـصات بوسـیلۀ کـاربر و یـا بوسـیلۀ الگوریتمهای انتخاب ویژگی تعیین میگردند. شناسایی و ردیابی اشیاء بر پایـۀ همـین مشخـصات و ویژگیها انجام میشود، به این گونه که در هر فریم از دنبالۀ تصاویر ویدئویی، این ویژگیها جـستجو شده و با تطبیق این ویژگیها در فریمهای متوالی ، پروسۀ ردیابی وتخمین حرکت صورت مـیگیـرد.
وجود روشهای متنوع جستجوی ویژگـی و تطبیـق ، باعـث بوجـود آمـدن طیـف بـسیار وسـیعی از الگوریتمهای ردیابی ویژگی گردیده است . در واقع در روشهای مبتنی بـر ویژگـی دو سـئوال اصـلی مطرح است که باید پاسخ داده شوند: اول اینکه چه مشخـصات و ویژگیهـایی انتخـاب شـوند و دوم اینکه آنها چگونه فریم به فریم ردیابی و دنبال شوند. پاسخ به این دو سئوال ، پایۀ کلیۀ الگوریتمهایی که از روش ویژگی در ردیابی استفاده میکنند تشکیل میدهد.
در واقع مهمترین دلیل استفاده از روش ردیابی بر پایۀ ویژگی و یا استفاده از آن در کنار یکی از روشهای ردیابی دیگر ایجاد یک الگوریتم ردیابی است که در مقابل تغییرات ناشی از تغییر شـدت روشنایی محیط و یا تغییر زاویۀ دید از قدرت بیشتری برخوردار باشد.
بسیاری از ویژگیها، برای مثال ویژگی لبه ، حساسیت کمتری در مقابـل ایـن تغییـرات دارنـد.
بعضی از ویژگیها مانند ویژگی گوشه نیز به طور محلی دارای قابلیت شناسایی دقیق هستند. مکـان این ویژگیها میتواند مکان مناسبی برای محاسبات هندسی مانند تخمین حرکت دوربین نسبت بـه صحنه باشد. ایجاد یک الگوریتم ردیابی مناسب بر پایۀ ویژگی ، در وهلۀ اول مستلزم شناخت کـافی از ویژگیها و مشخصات شئ ای که میخواهد ردیابی شود است تا بتوان از شناساگرهای متناسب بـا آنها استفاده کرد. اکثر الگوریتمهای ردیابی ویژگی ، یک حلقۀ چهار مرحله ای مطابق شـکل ۵-١ را
دنبال میکنند[١٨]:
١) پیش بینی کردن
٢) شناسایی ویژگی
٣) مطابقت دادن
۴) بازیابی اطلاعات
نخست مکان ویژگی در فریم بعدی بر اساس مکانهای قبلی آن و مدل حرکت پیش بینی می – شود. سپس تعدادی ویژگی کاندید شناسایی شده و با ویژگی اصلی مطابقت داده مـیشـوند. آنگـاه بهترین تطبیق بر اساس معیار تطبیق بهینه انتخاب میشود. البته الگوریتمهای ردیابی در اینکه چه ویژگیهائی را انتخاب کنند و پیش بینی را چگونه انجام دهند و چه معیار تطبیقی را بکار بگیرند بـا یکدیگر متفاوت هستند.
مرحلۀ پیش بینی بر پایۀ حرکت شئ از یک فریم به فریم بعدی و مدل حرکت انتخابی مـی- باشد که مدل حرکت از مدلهای سـاده ماننـد مـدل سـرعت ثابـت تـا مـدلهای پـارامتری پیچیـده وحرکتهای با توزیع احتمال خاص میتواند باشد.

لطفاً براي ارسال دیدگاه، ابتدا وارد حساب كاربري خود بشويد