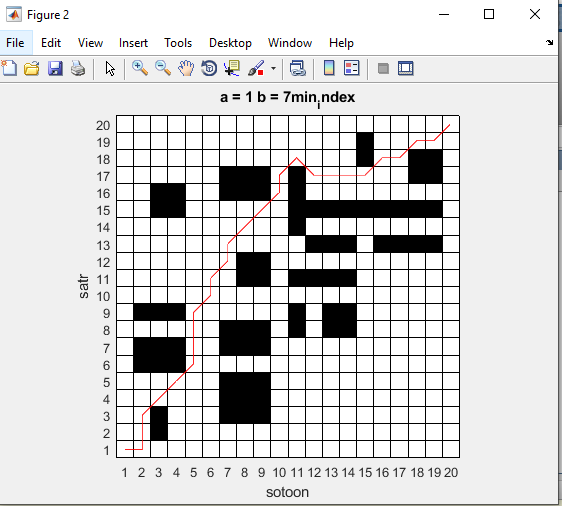
مسریابی ربات جستجو کننده خط با کمک الگوریتم ژنتیک با هدف کمینه کردن مسافت و زمان
مسریابی ربات جستجو کننده خط با کمک الگوریتم ژنتیک با هدف کمینه کردن مسافت و زمان :پروژه متلب
مشخصات ربات های صنعتی
- مقدمه
پروژه متلب بدون شک رباتها یکی از پدیده های نوین جهان معاصر هستند و از بدو پیدایش تا به امروز پیشرفت های زیادی نموده اند و با نفوذ چشمگیری که در صنایع مختلف در رشته های تحقیقاتی و پژوهشی داشته اند، در بسیاری موارد جایگزین انسان شده و ناممکن های بیشماری را ممکن ساخته اند و بار سنگین انجام کارهای تکراری را از دوش بشر برداشته اند.
پروژه متلب امروزه با اتکا به سیستم های کامیپوتری و به خدمت گرفتن کامپیوتر در ابعاد وسیعی از صنعت اعم از طراحی، تولید، کنترل، و …. ساختار صنعتی جهان با سرعت فزایند ه ای رو به دگرگونی است و سیستم های مدرن با شتاب چشمگیری، صنعت سنتی را در تمامی طیف وسیعش از صنایع سنگین تا صنایع ظریف از صحنه صنعت دور می کنند و در این خصوص، ربات ها بعنوان آخرین نسل ماشین های مدرن در هر پروسه و در هر مرحله ای از تولید صنعتی ظاهر شده و مطابق برنامه های از قبل تعیین شده از ظریفترین عملیات تا پیچیده ترین آنها را با سرعت، دقت و هزینه ای غیر قابل مقایسه با محصول کار متخصص ترین نیروهای انسانی، انجام می دهند . به این ترتیب استفاده از ربات این امکان را فراهم می سازد تا انسان ها به مشاغل جدید و فعالیت هایی که قوای فکری و خلاقیت و ابتکار آنها را بکار گیرد، روی آورند.
کشورهای صنعتی پیشرفته، این نقش اعجاز آفرین ربات ها را دریافته اند و برآنند که با استقرار گسترده ربات ها در صنایع مختلف در جهت افزایش تولید و کاهش هزینه ها گام بردارند و در حقیقت می توان گفت که حفظ حیات و اقتدار صنعتی خود را تنها در گرو بکارگیری وسیع ربات ها می دانند، پس این ربات ها هستند که آینده صنعت را رقم می زنند.
لزوم سرمایه گذاری های کلان در ایجاد صنایع روباتیک، حتی برای تولید کنندگان که در حال ورشکستگی هستند نیز آنها را از رو آوردن به چنین پروژه هایی بازنداشته است، چرا که می دانند رباتیک کردن صنایع، هزینه خودش را خود تامین و جبران می کند و هر چه بیشتر ربات بکار گرفته شود بازده بالاتری خواهد داشت. اصولا کشورهای صنعتی منافع خود را در این می بینند که مشکل تامین بیکاران را که بر دوش دولتهایشان سنگینی می کند، تحمل نمایند. ولی دست از رباتیک کردن صنایع برندارند، چون پیروزی در رقابت های صنعتی را تنها در گرو بکارگیری رباتها می دانند.
پروژه متلب هدف از بیان مطالب فوق درک دقیقتر و عمیقتر از فاصله ای که بین ما و آنها اتفاق افتاده است فاصله ای که جز تلاش همه جانبه و برنامه ریزی شده از بین نخواهد رفت متاسفانه باید اذعان داشت که روحیه فرار از تکنولوژی پیچیده و کامپیوتری و رو آوردن مشتاقانه به صنایع کلاسیک و روشهای اولیه و ابتدایی وضوح به چشم می خورد، هرچه ممکن است بطور مقطعی تا حدودی نیاز به خود کفایی و استقلال صنعتی را برآورده سازد، اما باید توجه داشت که تداوم این طرز تفکر و غفلت از روند رشد صنعتی جهان ه در جهت بکارگیری هرچه بیشتر از کامپیوترها و میکروپروسورها در طراحی وتولید گام بر می دارد، نتیجه ای جز کمک به هرچه عمیق تر کردن فاصله بین صنایع ما و صنعت پیشرفته امروزی نخواهد داشت. با توجه به مطالب فوق، چنین به نظر می رسد که اگر چنانچه در چنین مرحله ای، استفاده از سیستمهای پیچیده کامپیوتری از جمله ربات، عملی، مقرون به صرفه، مفید و یا حتی از نظر سیاسی و اقتصادی مصلحت نبوده و بکارگیری آنها در صنایع امروزی ایران قابل توصیه نباشد، فراگیری دانش فنی چنین سیستمهایی لازم و اجتناب ناپذیر است و درهیچ موقعیتی ازآن بی نیاز نخواهیم بود.
- اجزای رباتهای صنعتی:
پروژه متلب رباتهای صنعتی به تناسب کاربرد با اشکال گوناگون و با توانایی های متفاوت ساخته می شوند، ولی به طور کلی دارای وجوه مشترکی هستند. رباتها معمولاً از چند قسمت اصلی تشکیل شده اند:
۱- واحد مکانیکی شامل موتور، پیستون، تسمه، چرخها، چرخ دندهها و …
۲- کنترل کننده مکانیکی که اطلاعات را ذخیره و حرکت واحد مکانیکی را هدایت می کند.
۳- منبع قدرت که انرژی لازم را برای حرکت واحد مکانیکی تامین می کند.
۴- سنسور که میتواند از انواع بینایی، صوتی، تعیین دما، تشخیص نور، تماسی یا حرکتی باشد
- واحد مکانیکی
سینماتیک
سینماتیک ربات چگونگی حرکت نسبی بین اجزای مختلف ربات و نحوه قرارگیری آنها را مشخص می کند. چهار نوع حرکت اساسی در رباتهای صنعتی وجود دارد که عبارتند از:
الف) دکارتی
ب) استوانه ای
ج) کروی
د) بازویی
پروژه متلب این چهار حرکت در شکل ( ۱-۲ ) نشان داده شده اند.
الف) حرکت دکارتی : رباتهایی که از این سیستم حرکتی استفاده می کنند از یک ستون ثابت و یک بازوی متحرک و دوتکه L شکل، تشکیل شده اند. به این رباتها، رباتهای XYZ نیز گفته می شود. همان طور که در شکل مشاهده می شود نحوه اتصال و یاتاقان بندی اجزا به گونه ای است که تکه دوم بازو، قابلیت حرکت در سه راستای طولی، عرضی و ارتفاعی را دارد. موارد استفاده از این حرکت در شکل( ۱-۲ ) مشخص گردیده است.
ب) حرکت استوانه ای : رباتهای با حرکت استوانه ای متشکل از یک صفحه ثابت و یک ستون گردان هستند. روی ستون گردان بازویی نصب شده که قابلیت حرکت در جهت عمود بر ستون را دارد. با ترکیب حرکات فوق بازو را می توان به هر نقطه ای در فضای سه بعدی هدایت کرد.
ج) حرکت کروی : یک تیر که به صورت تلسکوپی باز و بسته می شود و با اتصال کاسه ساچمه ای به یک صفحه ثابت متصل شده است، اساس چنین حرکتی را شکل می دهد. این سیستم حرکتی انعطاف بیشتری نسبت به سیستم های قبلی دارد.
د) حرکت بازویی : این سیستم الهام گرفته از حرکت بازوی انسان است. بازو به صورت دو تکه، سه تکه ویا بیشتر ساخته می شود و در جهاتی که در شکل نشان داده شده قابلیت حرکت وجود دارد.
واحد مکانیکی از یک سری لینک (Link) و لولا که قابلیت حرکت در جهات مختلف را داشته باشد تشکیل شده است و درنتیجه، حرکت تعریف شده ای را برای ربات ایجاد می کند.
این مکانیزم ها بوسیله محرک هایی که می توانند سیلندرهای نیوماتیک یا هیدرولیک، موتورهای الکتریکی و یا محرک های هیدرولیکی دوار باشند، به حرکت در می آیند. این محرک ها می توانند مستقیماً به اتصالات و لینکهای مکانیکی متصل باشند ویا اینکه بطور غیر مستقیم توسط زنجیره ها، چرخدنده ها، و تسمه ها و یا پیچ های ساچمه ای به حرکت در آیند. در صورت استفاده از محرک های نیوماتیک و یا هیدرولیک، جریان هوا یا روغن به محرک ها توسط شیرهای کنترل کننده که روی واحد مکانیکی نصب می شوند، کنترل می شوند. به منظور درک موقعیت های لینک ها و اتصالات نسبت به یکدیگر، از تعدادی پس خور (feed back) که روی اتصالات مکانیکی نصب می شوند، استفاده می شود. این پس خورها اطلاعات اخذ شده را به واحد کنترل کننده انتقال می دهند. از میکروسوئیچ هائی ساده که بوسیله بازوهای ربات تحریک می شوند و یا از وسایل سنجش موقعیت مانند انواع پتانسیومترها، سرعت سنج ها، تنش سنج ها و سایر وسایلی از این قبیل می توان به عنوان پس خور استفاده کرد.
اطلاعات پس خور به تناسب وسایل سنجش مورد استفاده، می تواند دیجیتال یا آنالوگ باشد، ساختمان واحد مکانیکی از سه قسمت زیر تشکیل شده است:
الف) عمل کننده انتهائی(End-effector): عمل کننده های انتهایی در رباتها دارای اشکال مختلف هستند و هر یک قادر به اجرای عملیات مخصوص به خود می باشند. به عنوان مثال می توان از پنجه ها (Grippers)با بالشتک های مکشی برای گرفتن اشیاء، نازلهای مختلف برای انجام عملیات برش با گاز و مشعل ها برای جوشکاری قوس الکتریکی نام برد.
نقش عمل کننده انتهایی بسیار حساس است، چرا که در ارتباط مستقیم با نوع کار قرار دارد و حرکات مختلف خود رااز طریق لینک های متصل به یکدیگر ربات تامین می کند. صرف نظر از جزئیات ساختمانی عمل کننده انتهایی، می توان آن را به عنوان یک سیستمی که غالبا پیچیده است و دارای اجزای متحرکی می باشد و به طور معمول یک یا چند محرک مخصوص را دارا است بشمار آورد. عمل کننده های انتهائی اغلب مجهز به حس کننده های ویژه ای هستند که به آنها قابلیت انطباق با شرایط محیطی را بطور دقیق می دهد.
ب) بازو (Arm): عمل کننده انتهائی نمی تواند به تنهای از عهده انجام عملیات برآید و برای انجام یک کار مستلزم حرکت های اضافی به منظور قرار گرفتن در وضعیت صحیح و دقیق مورد نظر می باشد. این حرکات اضافی بوسیله یک سیتسم مکانیکی با شکل هندسی قابل تغییر که اصطلاحاً بازو نامیده می شود و قادر به انجام حرکاتی با دامنه محدود می باشد، تامین می گردد.
ج) چرخهای ربات
اگر روبات شما دارای چرخ برای حرکت است جنس و اندازه چرخ یکی از اساسی ترین مسائلی است که می تواند میزان توانایی ربات را مشخص کند. چرخ ربات را با توجه به جنس مکانی که ربات باید در آن حرکت کند به گونه ای انتخاب کنید که بیشترین ضریب اصطکاک را داشته باشد. در واقع عامل انتقال انرژی چرخها به زمین و در نتیجه حرکت ربات، اصطکاک چرخها با زمین است. اگر نیروی محرکه بسیار قوی در اختیار داشته باشیم ولی چرخ های ماشین بر روی زمین سر بخورد قطعاً نتیجه مناسبی نخواهید گرفت. در صورتی که چرخ روکش مناسبی ندارد و ضریب اصطکاک آن کم است باید یه گونه ای این مشکل را حل کرد . اگر ربات بر سطح صاف و محکمی مانند چوب حرکت می کند، لاستیک های ژله ای بهترین گزینه هستند.
چرخ ربات را باید در اندازه ای انتخاب کرد که در هنگام حرکت قدرت و سرعت مناسب را برای شما ایجاد کند. اصولاً هر چقدر قطر چرخ را افزایش دهیم سرعت ربات زیاد شده و در عوض قدرت آن کاهش می یابد. برای
بدست آوردن سرعت ربات باید محیط چرخ آن را بدست آورد و در سرعت چرخش آن ضرب کرد در این صورت میزان حرکت در واحد زمان بدست خواهد آمد.
د ) معرفی چند مکانیزم پرکاربرد
آشنایی با مکانیزم ها تاثیر بسزایی در طراحی و ساخت مکانیک ربات دارد. به مجموعه ای از اجزای مکانیکی که به یکدیگر متصل و یا در تماسند و می توتنند نسبت به هم حرکت کنند، مکانیزم می گوییم. از مکانیزم ها برای تبدیل حرکت چرخشی الکتروموتورها به حرکات مورد نظر خود استفاده می کنیم.
۱- مکانیزم چرخ وشانه (Rack & Pinion)
این مکانیزم از دو عضو چرخ (Pinion) و شانه(Rack) تشکیل شده است و از آن برای تبدیل حرکت دورانی چرخدنده به حرکت مستقیم الخط شانه استفاده می کنیم. در مواردی که بخواهیم دریچه ای را باز و بسته کنیم و نیز در بسیاری موارد دیگر می توانیم از این مکانیزم بهره بگیریم. در اشکال زیر نمونه هایی از کاربرد این مکانیزم را می بینید.
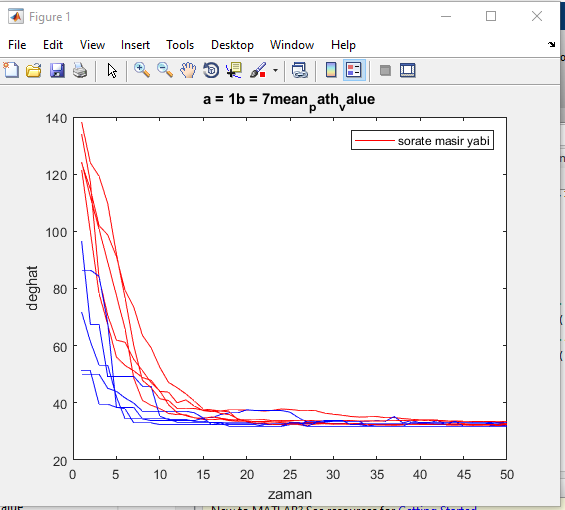
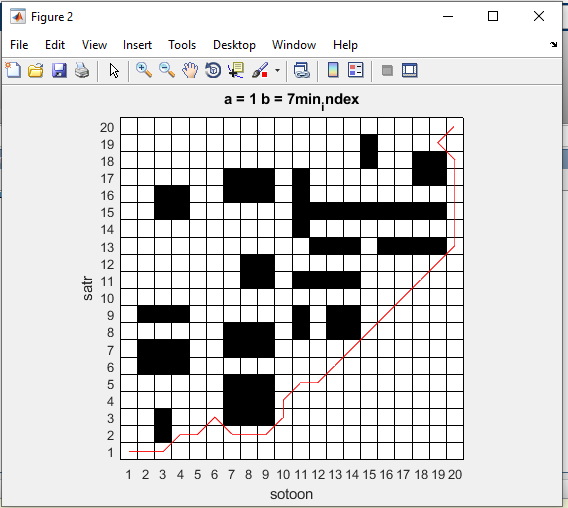
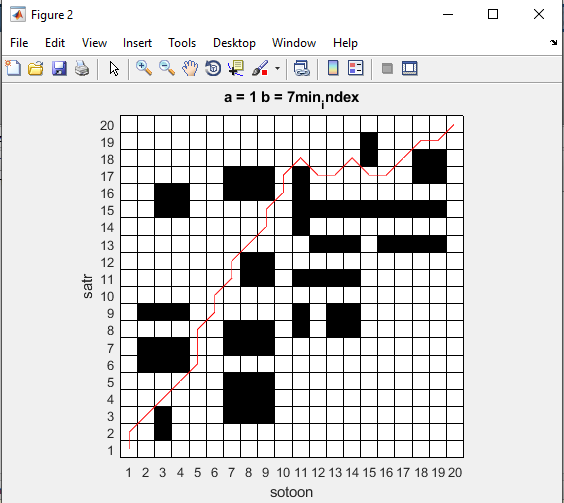
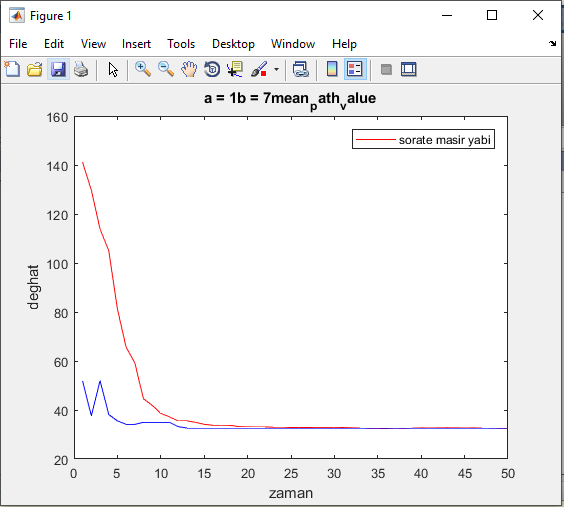
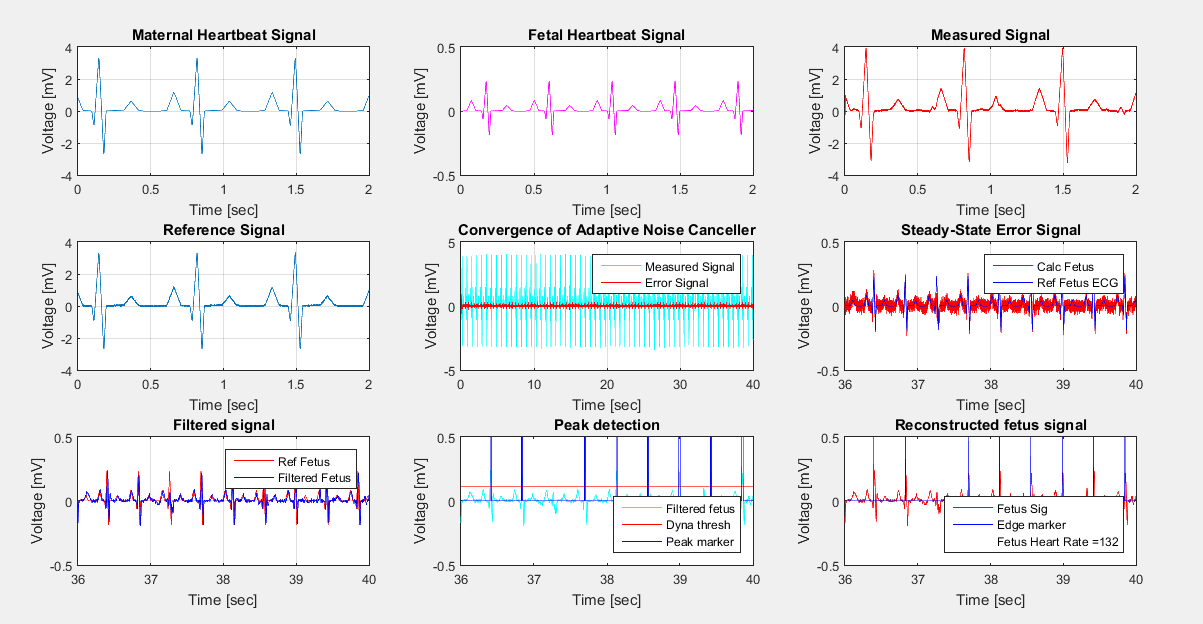
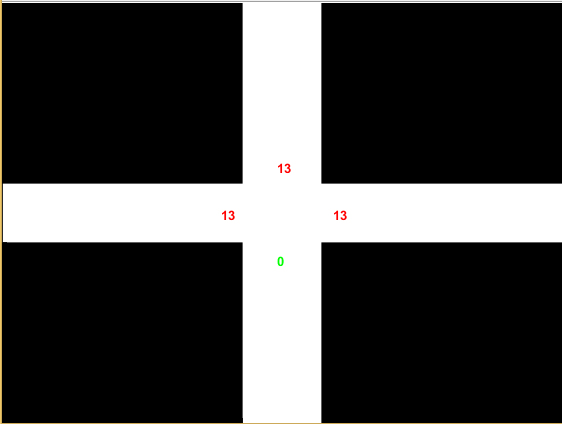
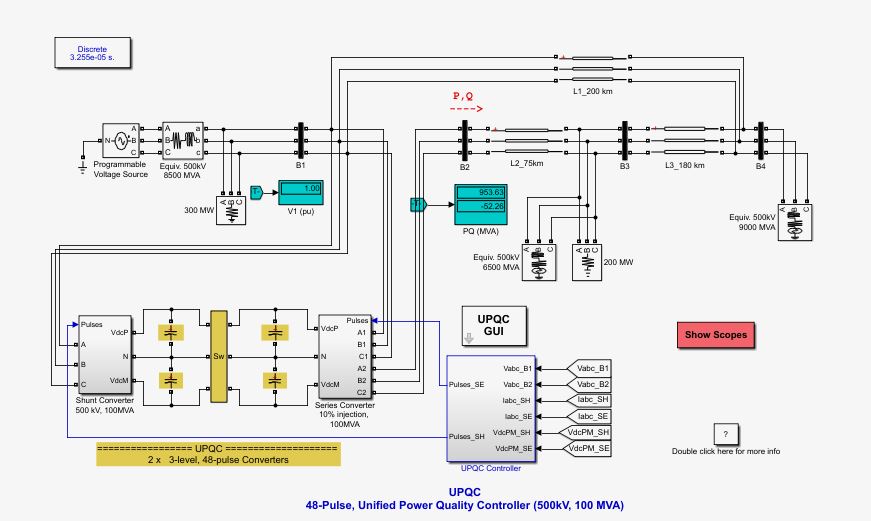
خروجی متلب :



لطفاً براي ارسال دیدگاه، ابتدا وارد حساب كاربري خود بشويد