شبیه سازی سیستم اتوپارک در متلب با کمک روش ILQG در متلب
شبیه سازی سیستم اتوپارک در متلب با کمک روش ILQG در متلب :پروژه متلب
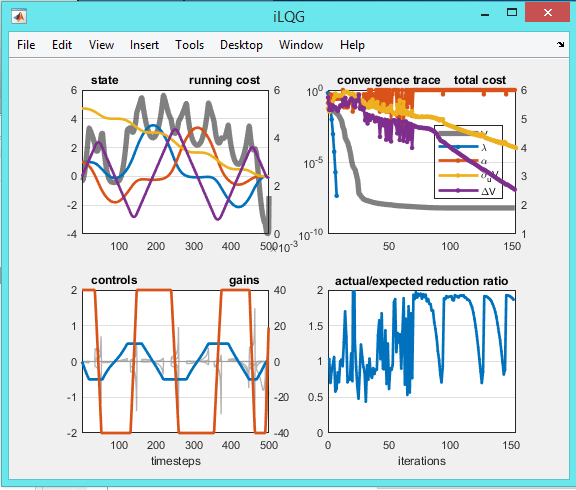
در این پروژه با استفاده از بهینه سازی سیستم سوخت و زمان میتوان بهینه ترین پارک اتوماتیک ماشین را بدست اورد چون همانطور که میدانیم روش lqg روش بهینه شده می باشد.پروژه کامل برای درس بینایی ماشین و کنترل بهینه می باشد.
سیستمهای پارک اتوماتیک
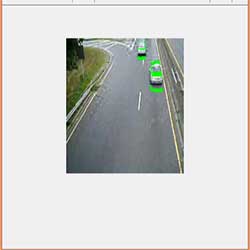
پروژه متلب سیستمهای پارک اتوماتیک، راههای گوناگونی برای درک اشیای اطراف خود دارند. برخی از آنها دارای سنسورهایی هستند که در اطراف سپرهای عقب و جلوی خودرو هستند و بهعنوان گیرنده و فرستنده کار میکنند. این سنسورها، سیگنالهایی را به اشیای اطراف اتومبیل میفرستند و دوباره آنها را دریافت میکنند. سپس کامپیوتر خودرو با محاسبهی مقدار زمان صرفشده برای بازگشت سیگنالها، موقعیت اشیای پیرامون را محاسبه میکند. سیستمهای دیگری موجود بوده که دارای دوربینهایی هستند که بر روی سپرهای خودرو قرار گرفتهاند یا برای کشف اشیا از رادار استفاده میکنند.پروژه متلب البته نتیجهی نهایی در همهی آنها یکسان است. اتومبیل میتواند اتومبیلهای پارک شدهی دیگر و فضای مناسب برای پارک و فاصلهی مناسب تا لبهی جدول را تشخیص بدهد و سپس بهدرستی پارک شود. سنسورهای جانبی پارک خودکار، معمولا از سنسورهای الکترومغناطیسی یا اولتراسونیک (فراصوتی) برای تشخیص فاصله با اشیای اطراف خودرو استفاده میکنند. نمونههای رایج سسنورهای اولتراسونیک با الگوبرداری از مکانیسم عملکرد طبیعی خفاش برای تشخیص موانع ساخته شده است.
عملکرد سیستمهای پارک اتوماتیک
پروژه متلباین سیستم با فرستادن یک موج فراصوت به اطراف و دریافت فرکانس بازگشت از طریق سنسورهای صوتی، فاصله و حجم موانع را تشخیص میدهد و با تحلیل این دادهها توسط کامپیوتر، درک صحیحی از موقعیت خودرو در میان اشیای اطرافش میدهد. البته در یک نظرسنجی عمومی که در سال ۲۰۱۶ انجام شد، بهصورت میانگین از هر ۴ راننده، ۳ نفر به کارایی این سیستم اعتماد نداشتند و معتقد بودند که خودشان بهتر میتوانند خودروشان را پارک کنند. این سیستم در مقایسه با پارک دستی بسیار سریعتر، دقیقتر و ایمنتر است. هرچند که معایبی مانند ناتوانی سیستم در کنترل فاصله در خودرو با جوی (برای راحتی پیاده و سوارشدن سرنشینان) و عدم توانایی تشخیص موانع عمودی با قطر کم (مانند میله) دارد ولی باید اشاره کرد که در اکثر مواقع میتواند راننده را در انجام یکی از سختترین اعمال یک رانندگی شهری یاری کند. در بازار امروز، نصبشدن این سیستم روی خودرو بیشتر جنبهی آپشن دارد تا اینکه واقعا مورداستفاده قرار بگیرد. پروژه متلب همانطور که خیلی از رانندهها رادار جلوگیری از برخورد با مانع جلو را غیرفعال میکنند تا بتوانند به سبک خودشان رانندگی کنند، بسیاری هم وجود سیستم اتوپارک را بیهوده میدانند و معتقدند که خودشان بهتر از کامپیوتر میتوانند پارک دوبل بزنند؛ اما با تمام این اوصاف، وجود سیستمهای پیشرفته در یک خودرو میتواند به ایمنی هرچه بیشتر آن کمک کند و علاوه بر آن، کار را برای راننده سادهتر کند.
عملکرد سیستم
پروژه متلبروال کار چندان پیچیده نیست. ابتدا باید جعبهدنده را در حالت D قرار دهید. سپس دکمهی اتوپارک را فعال کنید. پروژه متلببرای کامپیوتر خودرو تعیین کنید که میخواهید خودرویتان در کدامسوی خیابان (چپ و راست) پارک شود. با تأیید این وضعیت تا زمانی که رادارهای هوشمند خودرو فضای مناسب را پیدا نکردهاند، باید به مسیر خود ادامه دهید. بهمجرداینکه سنسورهای جانبی و کامپیوتر هوشمند فضای مناسب را بررسی کرد، در نمایشگر روی آمپر نماد R بهمعنی قرار دادن جعبهدنده در حالت دنده عقب، پدیدار میشود. این پایان کار است. دیگر کاری به ترمز و گاز نداشته باشید. خودروی شما، بهراحتی پارک دوبل میزند!
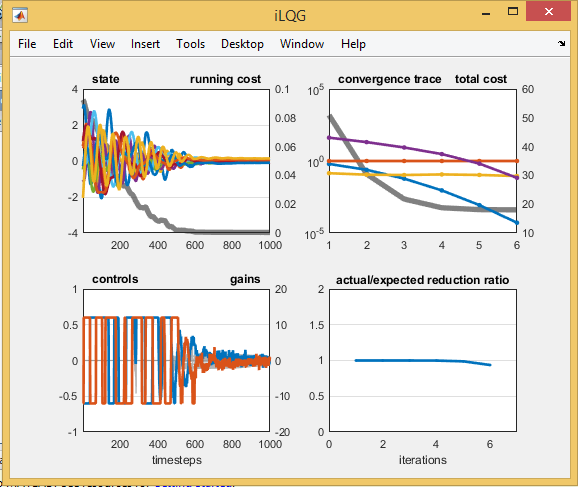
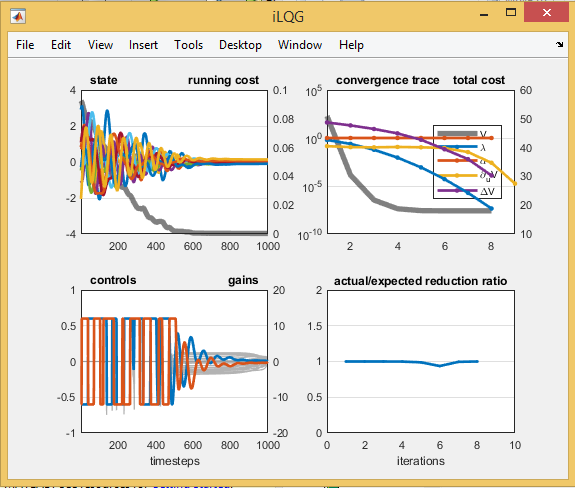
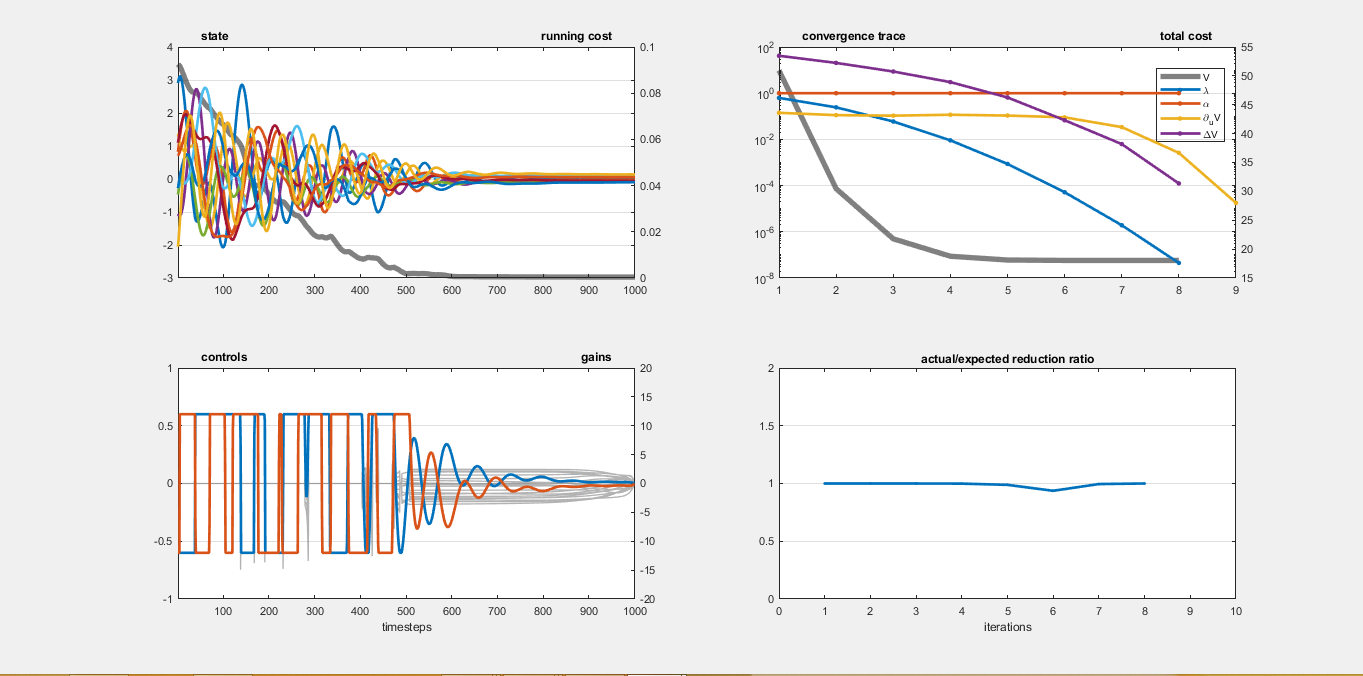
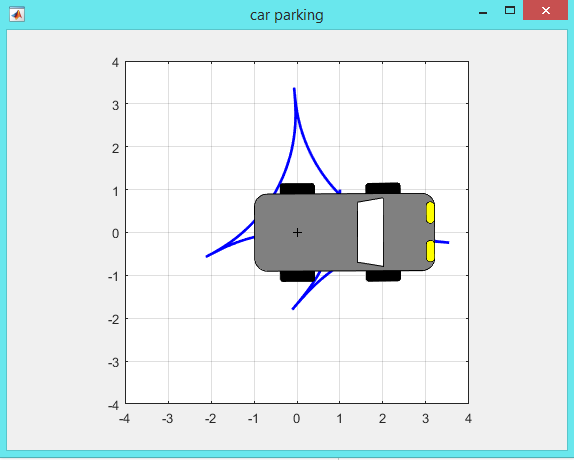
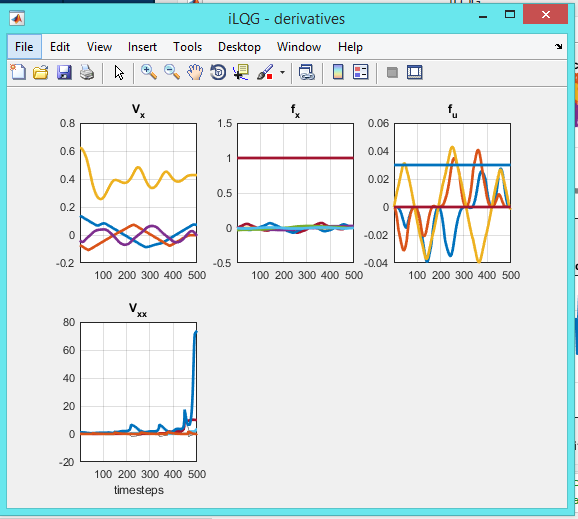
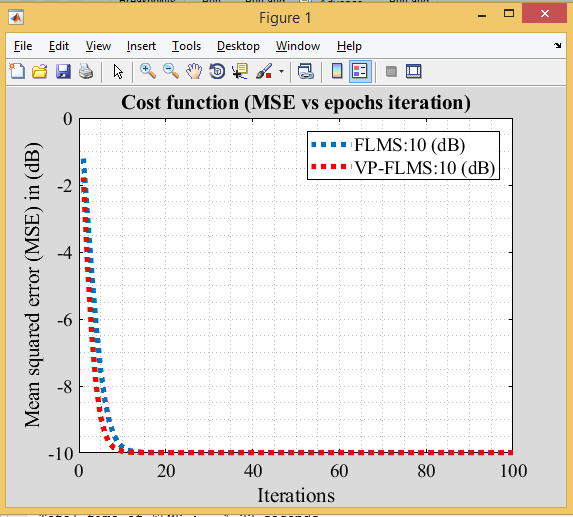
خروجی متلب :
لطفاً براي ارسال دیدگاه، ابتدا وارد حساب كاربري خود بشويد