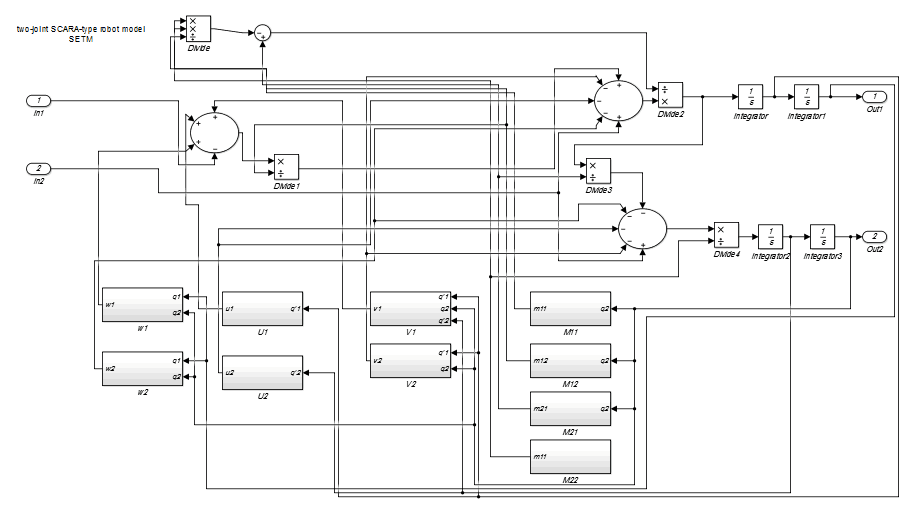
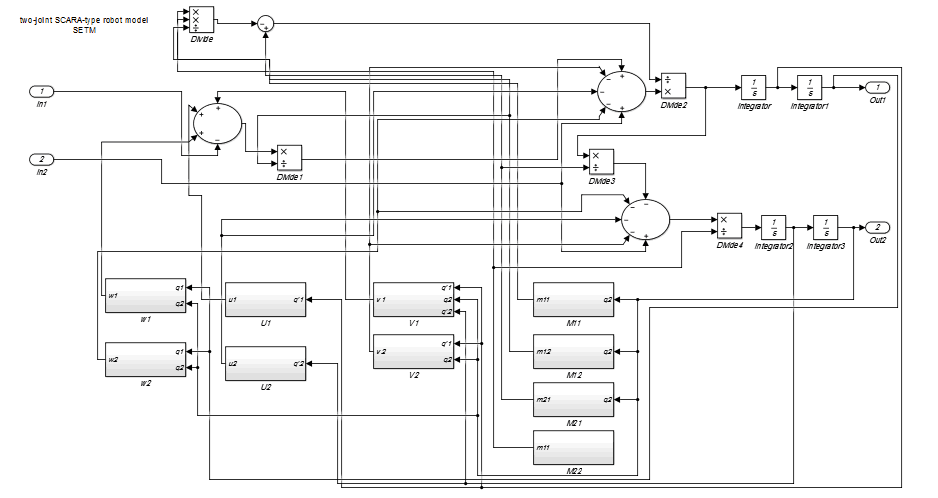
شبیه سازی کنترل ربات به وسیله کنترل پیش بین ( mpc):انجام پروژه متلب
شبیه سازی کنترل ربات به وسیله کنترل پیش بین ( mpc) بهمراه بهمراه راهنما فارسی :انجام پروژه متلب
لغت ربات در اکثر زبانهای دنیا با همین تلفظ دارای معنای واحدی میباشد. این لغت اولینبار در خلال سالهای ۱۹۲۰ تا ۱۹۳۰ در نمایشنامهای با نام “RUR (Rossmuse Universal Robot)” نوشته “کارل کاپک” نویسنده چکاسلواکی بهکار برده شد. در این نمایشنامه بازیگران نقش موجوداتی مصنوعی و کوچک شبیه انسان را بازی میکردند، که بهطور مطلق تحت فرمان صاحب خود قرار داشته و دستوراتش را موبهمو اجرا میکردند. این موجودات ربات نامیده میشدند که ریشه آن از لغت اسلاو (یعنی اسلواکییایی!) Robota به معنای “کارگر اجباری” است.
قوانین ربوتیک
در سال ۱۹۴۰،Issac Assimov سه قانون Roobtics را به شرح زیر تبیین کرد:
- یک ربات موجودی است که نباید به انسان آزار برساند و اجازه ندهد به چیزی ضرر برسد.
- باید از انسان اطاعت کند، مگر این که با قانون اول مغایرت داشته باشد.
- باید خودش را در برابر خطر و ضرر محافظت نماید، مگر اینکه با قانون اول و دوم مغایرت داشته باشد
ربات هوشمند مسیر یاب
ربات مسیریاب چه باید بکند؟
صورت مساله ی ساخت ربات مسیریاب )تعقیب خط( در مسابقات مختلف دارای جزییات زیاد و بعضا متفاوتی می باشد، اما اصل موضوع در همه ی آنها این است که ربات باید بتواند خط مشکی رنگی به عرض ۱٫۸ سانتی متر)معمولا چسب برق( را در یک صفحه ی سفید دنبال کند؛ یعنی با قرار دادن ربات در ابتدای خط مشکی و روشن کردن آن، ربات باید بتواند خط مشکی را دنبال کرده و هرکجا خط پیچید، او هم بپیچد.
بلوک دیاگرام یک ربات مسیریاب:
از نظر کلی هر ربات باید:
*از طریق سنسورهایش اطلاعاتی را از دنیای خارج جمع آوری نماید.
*این اطلاعات را به اطلاعات قابل فهم مغز پردازشگر خود تبدیل و به
آن منتقل کند.
*بر طبق برنامه ریزی قبلی، اطلاعات را پردازش و تصمیم مناسب را
اتخاذ نماید.
*تصمیمات نهایی را به کمک عملگرهایش اجرا کند.
ربات مسیریاب نیز شامل همین اجزاست:
*برای حس کردن خط، به دست کم دو سنسورکه تفاوت رنگ سفید و مشکی را درک کنند، نیاز دارد.
*اطلاعات خروجی سنسور از طریق یک مدار سوییچ یا مبدل آنالوگ به
دیجیتال به واحد پردازشگر منتقل می شود.
*مغز پردازشگر این ربات می تواند یک مدار منطقی یا یک میکروکنترلر
از هر نوعی باشد.
*تصمیم واحد پردازشگر مبنی بر ادامه ی مسیر یا پیچیدن به چپ و راست، از طریق فرمان های داده شده به موتورهای ربات از نوع dc)آرمیچر( یا پله ای stepper انجام می پذیرد.
عملکرد ربات مسیریاب:
ربات مسیریاب عملکرد ساده ای دارد. این ربات دارای دست کم دو یا سه سنسور نوری است که دو طرف خط مشکی در زمینه ی سفید قرار می گیرند. دو موتور نیز وظیفه ی به حرکت درآوردن دو چرخ ربات را بر عهده دارند. هرگاه ربات در حین حرکت، به انحرافی در خط مشکی برخورد کند، یکی از سنسورهایش
وارد خط می شود، مثلا اگر خط مشکی به سمت راست منحرف گردد، سنسور سمت راست ربات وارد خط مشکی می شود. ربات باید با توجه به سنسوری که وارد خط شده، جهت انحراف را تشخیص داده و به همان
طرف بپیچد. ساده ترین راه برای پیچیدن به یک طرف، خاموش کردن موتور همان سمت و ادامه ی کار موتور جهت مخالف می باشد.
مکانیک یک ربات مسیر یاب
مکانیک یک ربات مسیر یاب از ۴ بخش تشکیل شده است که به برسی هر کدام می پردازیم:
۱- شاسی یا بدنه که تمام اجزای ربات مانند برد ها و … روی آن قرار میگیرد
۲- موتور ربات مسیر یاب
۳- چرخ ربات مسیر یاب
۴- برد سنسور که وظیفه تشخیص خط زیر ربات میباشد
شاسی یا بدنه
این قسمت از مکانیک ربات مسیر یاب که وظیفه نگه داری تمام اجزا و مدار ها بر روی خود میباشد که اجزای ربات بر روی آن بسته میشوند و میتواند یک طلق پلاستیکی یا یک تکه چوب یا یک چیزی که نسبتا سبک باشد و بتواند این اجزا را تحمل کند
موتور یک ربات مسیریاب
یک ربات میتواند از دو نوع موتور استفاده کند که عبارت است از :
DC MOTOR
Steper Motor
شما برای یک ربات مسیر یاب به دو موتور خوب نیاز دارید که یکی برای چرخش به راست و دیگری برای چرخش به چپ که توصیه میشود این موتور ها رو در عقب ربات نصب کنید .
یک ربات باید از موتوری استفاده کند که داری قدرت بالا و دور مناسب باشد که ربات بتواند آن را کنترل کند و از دور خارج نشود و اگر نتوانستید چنین موتوری را تهیه کنید میتوانید از یک آرمیچر اسباب استفاده کنید به شرطی یک عدد گیر باکس بر سر راه آن بزارید که از سرعت آن بکاهد و قدرت آن بیشتر شود ( سرعت موتور های اسباب بازی زیاد و قدرت آنها کم میباشد ).
چرخ ها
در ساخت این چنین رباتی باید به چند نکته در مورد چرخ ها توجه کرد که عبارتند از :
۱- اندازه قطر چرخ، ۲- اندازه عرض چرخ، ۳- اصطحکاک چرخ با زمین
۱- اندازه قطر یک چرخ باید به اندازه ای باشد که با دور موتور شما هماهنگی داشته باشد چون هرچه قطر چرخ بشتر باشد با یک دور، موتور ربات مسیربیشتری را طی میکند و هر چه قطر آن کمتر باشد با یک دور چرخش موتور ربات مسیر کمتری را طی میکند
۲- اندازه عرض چرخ : توصیه میشود اندازه عرض چرخ برای این چنین کاری بین ۱ تا ۲ سانت انتخاب شود چون اگر بیشتر از این باشد اصطحکاک و وزن آن خیلی زیادی میشود
۳- برای اصطحکاک چرخ با زمین میتوانید از نوار چسب برق از طرف چسبندگی به زمین استفاده کنید که این کار لاستیک ها بیشتر به زمین میچسباند و تا حدی میتواند به تعادل ربات کمک کند
چرخ هرز گرد :
این چرخ که در قست میانی و جلوی ربات نصب میشود تنها وظیفه حفظ تعادل ربات دارد و باید کمترین اصطکاک را با زمین داشته باشد که میتوان از یکه بلبرینگ یا یک عدد ساچمه و یا … باشد
برد سنسور ( حسگر )
این بخش از ربات که یکی از مهمترین قسمت های یک ربات محسوب میشود و وظیفه تشخیص خط زیر ربات میباشد که باید فاصله استاندارد آن با زمین رعایت شود تا بهترین بازده را دارا باشد
چند نکته که باید در مکانیک ربات رعایت شود :
۱- حتما مکانیک ربات محکم بسته شود.
۲- اگر از چسب برای بستن استفاده میکنید حتما به همراه بست استفاده شود .
۳- برای بستن بردها به بدنه ( شاسی ) حتما از پیچ و مهره یا Spacer و مهره استفاده کنید
۴- برای محکم شدن و جلوگیری شل یا باز شدن اتصالات میتوانید از واشر فنری استفاده کنید .
۵- در جاهایی که ممکن است پیچ و مهره باعث اتصالات بین قطعات شود میتوانید از واشر فیبری استفاده کنید .
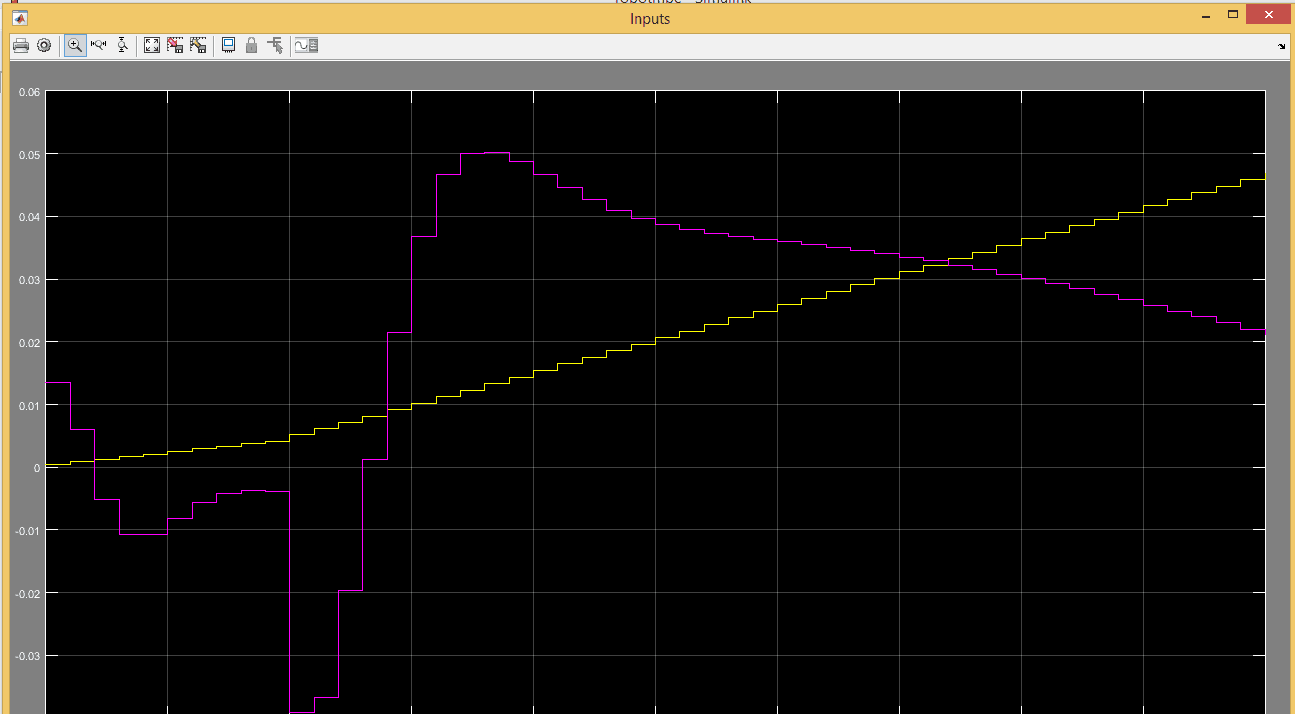
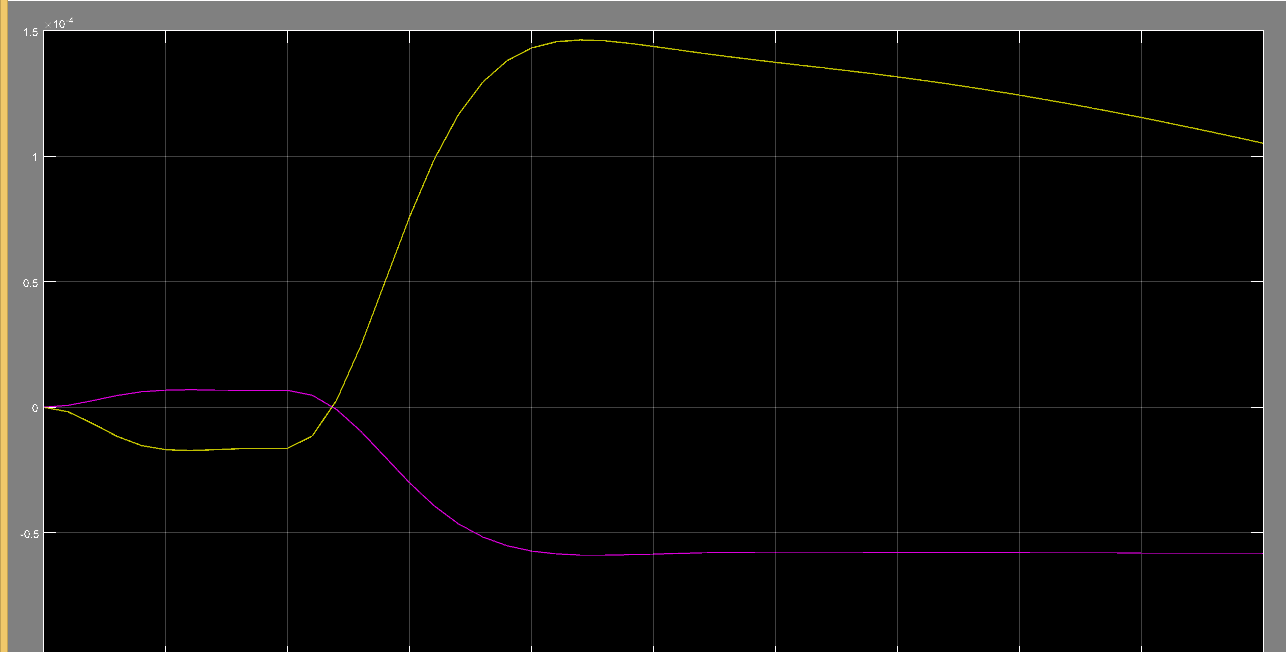
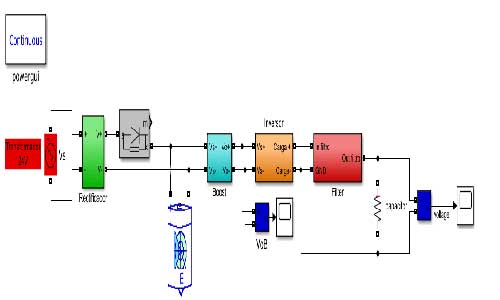
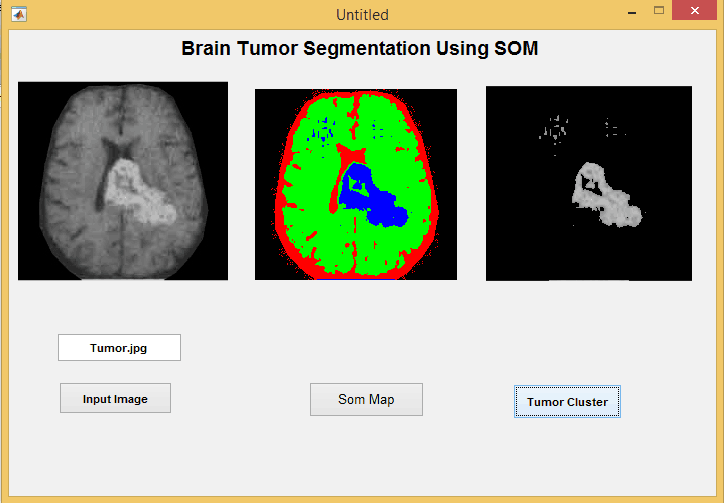
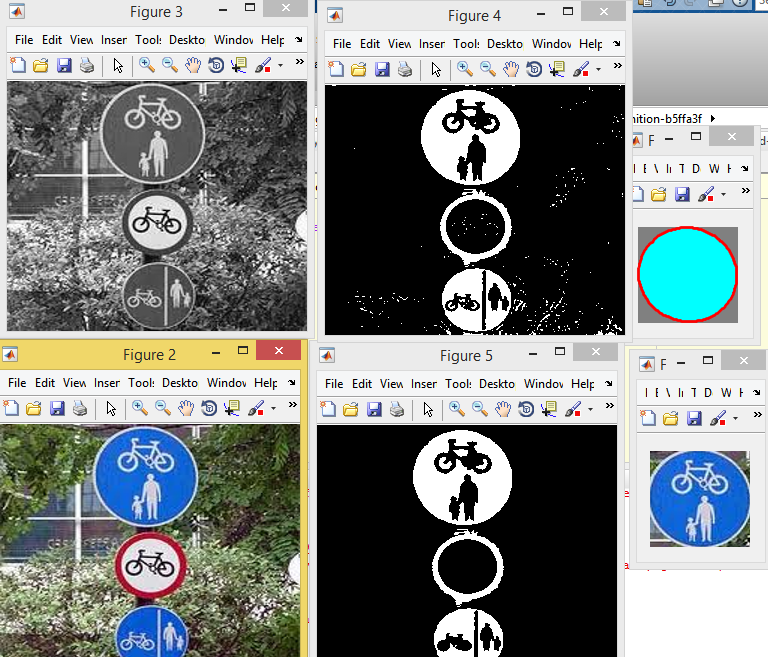
خروجی متلب :

لطفاً براي ارسال دیدگاه، ابتدا وارد حساب كاربري خود بشويد