شناسایی سیستم با روش FLMS در متلب
شناسایی سیستم با روش FLMS در متلب : پروژه متلب
پروژه متلب از یک سیستم به صورت عملی دیتا برداری شده است. دیتاهای حاصل در پایان همین پست پیوست شده است. این فایل شامل بردار زمان، بردار X و بردار Voltage است. اگر برای این سیستم یک مدل خطی نامتغیر با زمان در نظر بگیریم، این مدل را با استفاده از روشهای مختلفی که پایین ذکر شده. اینکار را برای دو حالت زیر انجام می دهیم:
رابطه بین مشتق X و Voltage
پروژه متلب شناسایی کلاسیک سیستم برای حوزه زمان به ازای ورودی دلخواه
شناسایی کلاسیک سیستم برای حوزه فرکانس با استفاده از پیدا کردن ضرایب تابع تبدیل یا معادله دیفرنس
شناسایی سیستم با استفاده از اغتشاشات تصادفی
شناسایی سیستم اغتشاشات توسط تابع همبستگی
مدل سازی یا شناسایی اغتشاشات توسط مدل ARMA
برای شروع آموزش انجام پروژه شناسایی سیستم با متلب به این صورت عمل می کنیم:
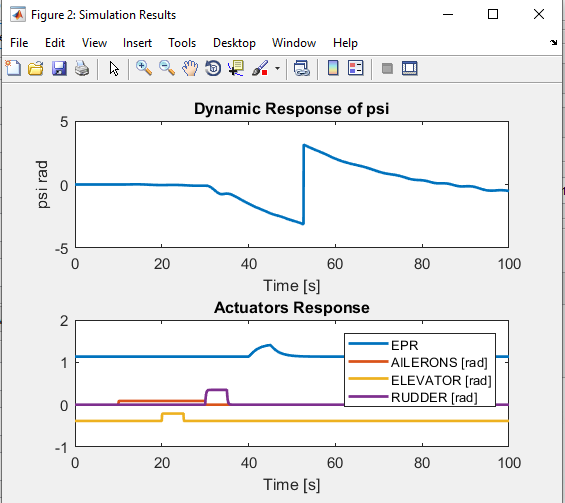
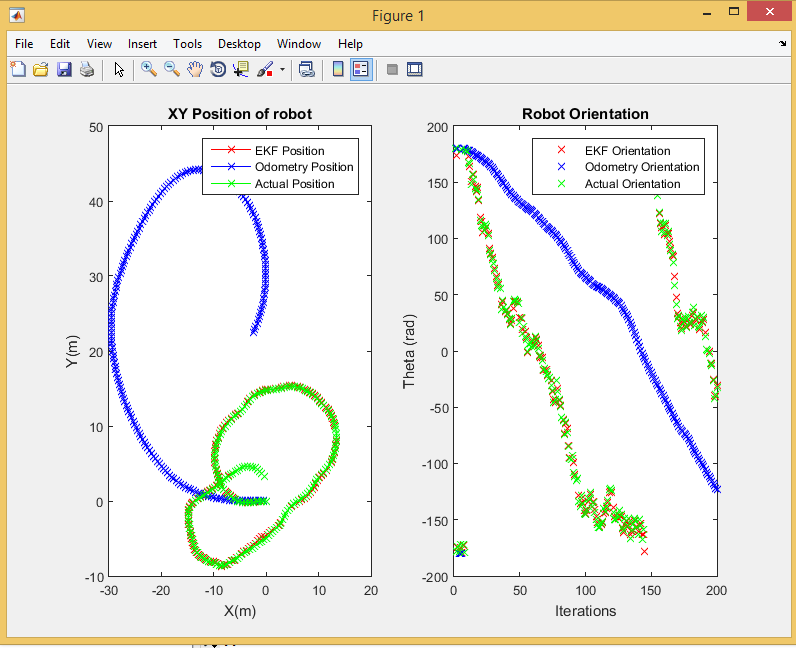
پروژه متلب در این تمرین شناسایی سیستمی با ورودی و خروجی داده شده که در شکل ۱ و ۲ نمایش داده شده است با پنج روش مختلف مد نظر میباشد. سعی شده است سیستم شناسایی شده مورد ارزیابی قرار گیرد.
ورودی و خروجی سیستم مورد نظر
به نظر می رسد در ذخیره سازی یا انتقال داده ها باتوجه به دلایل زیر اشتباهی رخ داده است.
۱- عدم یکسان بودن طول بردار ارائه شده برای زمان وX و ولتاژ
۲- صفر بودن مقادیر ورودی تا سطر ستون چهارم که ناشی از گرد شدن داده است.
۳- عدم یکسان بودن فرکانس نمونه برداری بدست آمده از روی بردار زمان
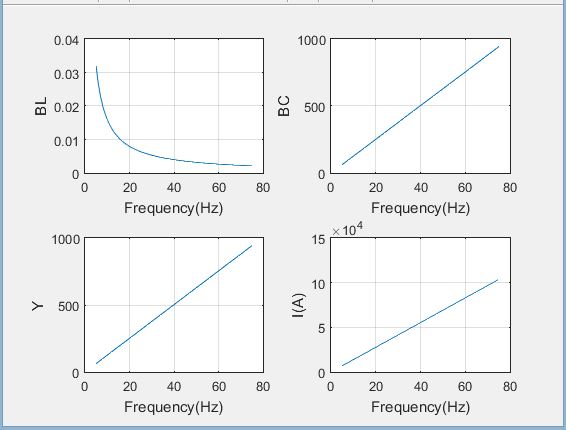
شکل زیر فرکانس نمونه برداری که از عکس تفاضل نمونه های بردار زمان بدست آمده است.
فرکانس نمونه برداری در طول زمان
روش اول: روش کلاسیک زمانی شناسایی سیستم
استفاده از روشهایی کلاسیک برای شناسایی سیستم ها در واقع استفاده از روشهای شناسایی سیستم های خطی می باشد.
در سیستم های LTI گسسته ی علی ، رابطه ی بین ورودی و خروجی سیستم با رابطه ی ۱ تعریف میشود.
که در سیستم های علی تغییر ناپذیر با زمان خطی پایدار رابطه ی بالا به رابطه ی زیر تغییر پیدا می کند.
در مساله ما در واقع هدف شناسایی g(k) میباشد.
در شناسایی کلاس سیستم ها با روش تابع ضربه ورودی های زیر مورد توجه می گیرد؟
ورودی ضربه
ورودی پله
ورودی دلخواه
که در مساله مورد بررسی ما ورودی دلخواه مورد نظر است
.
.
.
این مساله را می توان به صورت برداری به صورت زیر نوشت:
| رابطه ۳ | Y=GU |
که در آن Y بردار با بعد ۱*m
G بردار ۱*m درواقع همان بردار مربوط به پاسخ ضربه سیستم میباشد.
U مارتیس مربعی دارای بعد (M*M) که المان i و j ام ماتریس U ، u(i-j+1) می باشد.
که می توان با حل مساله حداقل میانگین مربعات آن را حل نمود.
به طوریکه در این روش با حل مساله LMS به جواب زیر می رسیم.
رابطه ی بین x و ولتاژ
پروژه متلب تابع تبدیل بدست آمده از تخمین LMS در شناسایی در حوزه ی زمان در رابطه x و ولتاژ (بالا) ، تابع تبدیل بدست آمده از تخمین LMS در شناسایی در حوزه ی زمان با استفاده از تابع شبه معکوس در رابطه x و ولتاژ
خروجی سیستم بدست آمده به وسیله تخمین LMS در شناسای حوزهی زمان
خروجی سیستم بدست آمده به وسیله تخمین LMS با استفاده از تابع شبه معکوس در شناسای حوزهی زمان
رابطه ی بین مشتق x و ولتاژ:
شکل زیر تابع ضربه ی سیستم را در حالت انتخاب مشتق بردار x به عنوان ورودی نشان میدهد.
تابع تبدیل بدست آمده از تخمین LMS در شناسایی در حوزه ی زمان در رابطه مشتق x و ولتاژ (بالا) ، تابع تبدیل بدست آمده از تخمین LMS در شناسایی در حوزه ی زمان با استفاده از تابع شبه معکوس در رابطه مشتق x و ولتاژ
روش دوم: شناسایی کلاسیک سیستم برای حوزه فرکانس
برای یک سیستم تغییر ناپذیر در زمان داشتیم که خروجی سیستم ناشی کانولشن پاسخ ضربه در سیگنال ورودی میباشد ، این قضیه معادل ضرب سیگنال ورودی در تابع تبدیل سیستم در حوزه ی فرکانس میباشد که مطابق رابطه ی زیر تعریف میشود.
رابطه ۵
رابطه بین x و ولتاژ
پروژه متلب با توجه به رابطه بالا پاسخ فرکانسی سیستم ما را به صورت زیر تخمین زده میشود.
اندازه تابع تبدیل تخمین زده شده در حوزهی فرکانس (بالا) فاز تابع تبدیل تخمین زده شده در حوزه ی فرکانس ( پایین)
رابطه بین مشتق x و ولتاژ :
اندازه تابع تبدیل تخمین زده شده در حوزهی فرکانس (رابطه بین مشتق x وولتاژ) (بالا) فاز تابع تبدیل تخمین زده شده در حوزه ی فرکانس (رابطه بین مشتق x وولتاژ) ( پایین)
روش سوم:شناسایی سیستم با استفاده از اغتشاشات تصادفی
رابطه ی بین تبدیل فوریه تابع خود همبستگی خروجی سیستم با خود همبستگی ورودی سیستم باه صورت رابطه ی زیر تعریف میشود.
رابطه ۶
اگر ورودی سیستم ، را نویز تصادفی سفید اعمال کنیم در این صورت میباشد ، لذا میتوان نوشت:
از این روشها تنها می توان گین سیستم را بدست آورد و اطلاعاتی راجع به فاز در اختیار ما قرار نمیدهد.و نویز در سیگنال ورودی و خروجی امکان ایجاد بایاس در شناسایی سیستم را به وجود میآورد.
)انداره ی تابع تبدیل سیستم با فرض اینکه ورودی نویز سفید باشد
روش چهارم:شناسایی سیستم اغتشاشات توسط تابع همبستگی
تابع تبدیل یک سیستم را میتوان با استفاده از تبدیل فوریه توابع همبستگی ورودی-خروجی و خود همبستگی ورودی بدست آورد. این روش هم برآوردی از گین سیستم و هم فاز را در اختیار میگذارد.
رابطه بین x و ولتاژ :
اندازه تابع تبدیل تخمین زده شده با استفاده از روش همبستگی (رابطه بین x وولتاژ) (بالا) فاز تابع تبدیل تخمین زده شده با استفاده از روش همبستگی (رابطه بین x وولتاژ) ( پایین)
رابطه بین مشتق x و ولتاژ:
اندازه تابع تبدیل تخمین زده شده با استفاده از روش همبستگی (رابطه بین مشتق x وولتاژ) (بالا) فاز تابع تبدیل تخمین زده شده با استفاده از روش همبستگی (رابطه بین مشتق x وولتاژ) ( پایین)
روش پنجم:مدل سازی یا شناسایی اغتشاشات توسط مدل ARMA
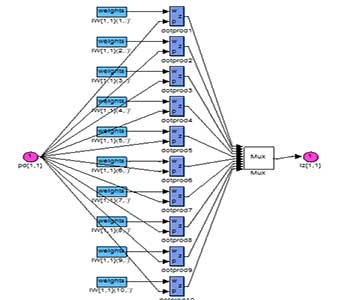
برای شناسایی سیستم ساختاری تلفیقی از مدل AR و MA میتوان تعریف کرد که در آن خروجی سیستم وابسته گذشته های نویز وابسته است. با توجه به شکل زیر هدف تنها پیدا کردن تابع تبدیل G(z) میباشد. بنابراین شناسایی ضرایب شکل … مورد نظر است .
رابطه ۱۰
شماتیک کلی مدل یک سیستم با فرض تمام توابع
در تخمین ARMA چون ورودی دخالتی در تولید خروجی ندارد لذا تنها برای یک حالت نتیجه خواهیم داشت.
برای تخمین ساختار مدل از نظر مرتبه مدل رابرای مرتبه های مختلف فیت نموده و معیار AIC_BIC برای انتخاب مرتبه ی صورت و مخرج تابع تبدل استفاده نمودیم و در نهایت ضرایب تخمین زده شده به صورت زیر میباشد.
AR_coef =
۱٫۹۵۲۴ -۰٫۹۵۷۰
MA_coef =
-۱٫۱۲۵۲ -۰٫۰۱۴۴ ۰٫۰۲۶۷ ۰٫۱۳۸۳
ضرایب تخمین زده شده برای تابعG(z) به صورت بالا میباشد. در وافع AR_coef ضرایب تخمین AR و MA_coef ضرایب تخمین MA می باشد که مدل کلی ARMA را می سازد .
شکل زیر خروجی مدل تخمینی را نشان میدهد. بخوبی دیده می شود که تخمین ARMA تخمین مناسبی از سیستم نمیباشد.
شماتیک کلی مدل ARMA
به نظر میرسد که مدل ARMA به علت اینکه ورودی در تولید خروجی نقشی ندارد ضعیف عمل نموده لذا مدل ARMAX را بهتر کردن تخمین استفاده نمودیم
روش ششم:مدل سازی یا شناسایی اغتشاشات توسط مدل ARMAX
رابطه ی بین x و ولتاژ
در مدل ARMAX همانند شکل نشان داده شده در زیر ورودی هم در خروجی تاثیر میگذارد.
شماتیک کلی مدل ARMAX
تخمین مدل ARMAX به صورت زیر میباشد
شکل زیر خروجی تخمین زده شده به ازای مدل ARMAX را نشان میدهد.
خروجی سیستم بدست آمده به ازای تخمین ARMAX در تخمین بین رابطه x و ولتاژ
رابطه ی بین مشتق x و ولتاژ
خروجی سیستم بدست آمده به ازای تخمین ARMAX در تخمین بین رابطه مشتق x و ولتاژ
بحث و نتیجه گیری
در این تمرین روشهای مختلف شناسایی سیستم به ازای ورودی و خروجی داده شده بررسی شد.
در روش اول با استفاده تکنیک شناسایی در حوزه ی زمان با تخمن LMS پاسخ ضربه سیستم شناسایی شد.
مشاهده شد که در حالتی که ماتریس شبه معکوس برای تخمین استفاده کردیم تخمینی بهتری بدست آمد درحالیکه تخمین بدون روش با پایداری شبه معکوس استفاده شد چون ماتریس تولیدی معکوس بنابراین پاسخ ضربه ی تخمینی در تولید خروجی موفق عمل نکرد.
با توجه به شکل ظاهری ورودی و خروجی می توان نتیجه گرفت که به ورودی در تولید خروجی نقش داشته است.
چرا که قسمت های گذرای موجود در قسمت اول ورودی سبب تولید قسمت های گذرای خروجی شده.
بنابراین قسمت سوم که شناسایی سیستم با ورودی اغتشاشات است نمی تواند تخمینی خوبی را در اختیار بگذرد چرا که خروجی ناشی از ورودی هست و نه تنها نویز، این موضوع در مدل ARMA نیز کاملا مشهود است.
چرا که تخمین بسیار ضعیفی از سیستم را ارائه میدهد. در حالیکه سیستم ARMAX تخمین بسیار قویتری را ارائه کرده است و تخمین سیستم زمانی که ورودی مشتق x است بسیار بهتر عمل میکند چرا که خروجی در قسمت گذرای اولیه نسبت به حالتی که ورودی خود x هست بهتر خروجی اصلی را دنبال میکند.
خروجی متلب :

لطفاً براي ارسال دیدگاه، ابتدا وارد حساب كاربري خود بشويد