شبیه سازی رادار داپلر (موج پیوسته با مدولاسیون فرکانس) در متلب
شبیه سازی رادار داپلر (موج پیوسته با مدولاسیون فرکانس) در متلب همراه گزارش فارسی :پروژه متلب
پروژه متلب رادار داپلر وسیله ایست که با استفاده از اثر داپلر سرعت اجسام در فواصل دور را مشخص میکند. این وسیله این کار را با فرستادن سیگنال مایکروویو به سمت هدف مورد نظر و دریافت انعکاس آن، انجام میدهد. رادار داپلر تغییرات سیگنال منعکس شده را نسبت به سیگنال اصلی آنالیز میکند. تغییرات در فرکانس سیگنال به ما اندازه دقیق و مستقیم سرعت مورد نظر نسبت به منبع رادار و جهت پرتو مایکروویو را میدهد. رادار داپلر در صنعت هوانوردی، ماهوارههای صوتی، دوربینهای سرعت سنج اجسام، رادیولوژی و… استفاده میشود.
اصطلاح رادار داپلر به دلیل استفادهٔ شایع هواشناسسان تلویزیون در گزارش وضع هوا، به غلط به معنای نوعی رادار مورد استفاده در هواشناسی به کار میرود. اغلب رادارهای مدرن هواشناسی برای بررسی حرکت بارش از تکنیک پالس-داپلر استفاده میکنند، ولی این تنها قسمتی از پردازش دادههای آنها است. بنابراین در حالی که این رادارها از فرم بسیار تخصصی رادار داپلر استفاده میکنند، اصطلاح رادار داپلر معنا و کاربرد بسیار گستردهتری دارد.
مفاهیم و تاریخچه
پروژه متلب یک سرباز ارتش ایالات متحده در حال استفاده ازتفنگ راداری، کاربردی از رادار داپلر برای تشخیص سرعت متخلفان.
رادار داپلر راداری است که یکی از خروجیهایش اندازهگیری سرعت میباشد. رادارهای داپلر میتوانند از نوع پالسی همدوس، موج پیوسته یا مدوله شده فرکانسی باشند. رادارهای داپلر موج پیوسته (CW) تنها خروجی سرعت را فراهم میکنند. رادارهای داپلر اولیه از نوع CW بودند و سریعا به رادارهای مدوله شده فرکانسی (FM-CW) ارتقا یافتند که از تغییر فرکانس فرستنده برای تعیین و به رمز در آوردن محدوده تغییرات استفاده میکنند. رادارهای CW و FM-CW معمولاً فقط برای یک هدف میتوانند پردازش انجام دهند که استفاده از آنها را محدود مینماید. با ورود روشهای دیجیتال، رادارهای داپلر پالسی MTI معرفی شدند و پردازش گرهای داپلر در همین زمان برای رادارهای پالسی همدوس توسعه یافتند.
مزیت ترکیب پردازش داپلر با رادارهای پالسی فراهم کردن اطلاعات دقیق سرعت است. این سرعت میزان تغییر برد نامیده میشود که توصیفکننده نرخی است که هدف به سمت رادار حرکت میکند یا از آن دور میشود. هدفی بدون نرخ تغییرات برد فرکانسی نزدیک فرکانس فرستنده را بازتاب میدهد و نمیتواند آشکار گردد. هدف داپلر صفر کلاسیک هدفی است که در جهت مماس بر اشعه آنتن رادار قرار دارد. اصولا هر هدفی که در جهت ۹۰ درجه نسبت به اشعه آنتن قرار بگیرد نمیتواند با سرعتش مشخص گردد. (فقط به وسیلهٔ انعکاس متعارف آن جسم)
رادارهای FM بهطور گستردهای در طی جنگ جهانی دوم برای استفاده در هواپیماهای نیروی دریایی ایالات متحده توسعه یافتند. اکثر آنها از طیف UHF استفاده میکردند و دارای یک آنتن فرستنده یاگی روی بال چپ و یک آنتن گیرنده یاگی روی بال راست بودند. این به آنها امکان میداد که با سرعتی بهینه هنگام نزدیک شدن به کشتیهای هدف پرواز کنند. بعدا وقتی ماگنترونها و امواج ماکروویو در دسترس قرار گرفتند، استفاده از آنها متوقف شد.
پروژه متلب هنگامی که تبدیل فوریه سریع دیجیتال ایجاد شد، فورا با رادارهای پالسی همدوس که در آنها اطلاعات سرعت استخراج میشد مرتبط گشت. مفید بودن این روش در رادارهای آب و هوایی و کنترل ترافیک هوایی سریعا ثابت شد. اطلاعات سرعت ورودی دیگری را برای پیگیریکننده نرمافزاری فراهم آورده و بررسی نرمافزاری را بهبود دادند. به علت فرکانس تکرار ضربان (PRF) پایین اکثر رادارهای پالسی همدوس که باعث بیشینه شدن محدوده پوشش رادار میشود، مقدار پردازش داپلر محدود است. پردازش گرهای داپلر تنها میتوانند سرعتهایی در محدوده مثبت و منفی نصف PRF رادار را پردازش کنند. این موضوع مشکلی برای رادارهای آب و هوایی به حساب نمیآید.
پروژه متلب رادارهای تخصصی با به وجود آمدن روشهای دیجیتال به سرعت مکانیزه شدند. رادارهای داپلر پالسی تمام مزایای محدوده عملکرد بالا و سرعت بالا را با هم ترکیب میکنند. رادارهای داپلر پالسی از PRF متوسط یا بالا (در مرتبه ۳۰kHz) استفاده میکنند. این PRF بالا اجازه میدهد تا اجسام با سرعت بالا نیز توسط رادار رویت گردند یا اندازهگیری سرعت با دقت و تفکیک پذیری بالایی انجام شود. معمولاً یکی از این دو حالت وجود دارد، پروژه متلب راداری که برای شناسایی اهدافی با سرعتی بین صفر تا دو ماخ طراحی میشود در اندازهگیری سرعت تفکیک پذیری بالایی ندارد در صورتی که راداری که برای تفکیک پذیری بالا در اندازهگیری سرعت طراحی میشود، محدوده گستردهای برای اندازهگیری سرعت ندارد. رادارهای آب و هوایی رادارهایی با تفکیک پذیری سرعت بالا میباشند در حالی که رادارهای دفاع هوایی محدوده بزرگی از سرعت اهداف را میتوانند آشکار سازی کنند اما دقت آنها در سرعت در حدود دهها نات است.
پروژه متلب قبل از انجام شدن طراحیهای ماکروویو، طراحی آنتنها برای CW و FM-CW بر اساس آنتن فرستنده و گیرنده جداگانه صورت میگرفت. در اواخر دهه ۱۹۶۰ تولید رادارهای ترافیک که از یک آنتن استفاده میکردند، آغاز شد. این امر با استفاده از پلاریزاسیون دایرهای و یک بخش موج بر مولتی پورت که در باند X کار میکرد، ممکن شد. در اواخر دهه ۱۹۷۰ استفاده از پلاریزاسیون خطی و انتشار دهندههای فریت در هر دو باند X و K جایگزین آن شد. رادارهای PD در یک PRF بسیار بالا برای استفاده از یک سوئیچ فرستنده گیرنده که از گاز پر شدهاست، کار میکنند و اکثراً از دستگاههای حالت جامد برای محافظت از تقویتکننده نویز کم گیرنده در هنگامی که فرستنده کار میکند، استفاده میکنند.
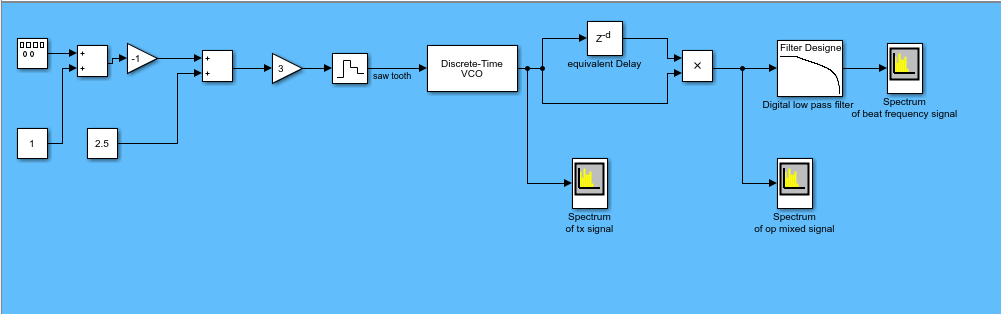
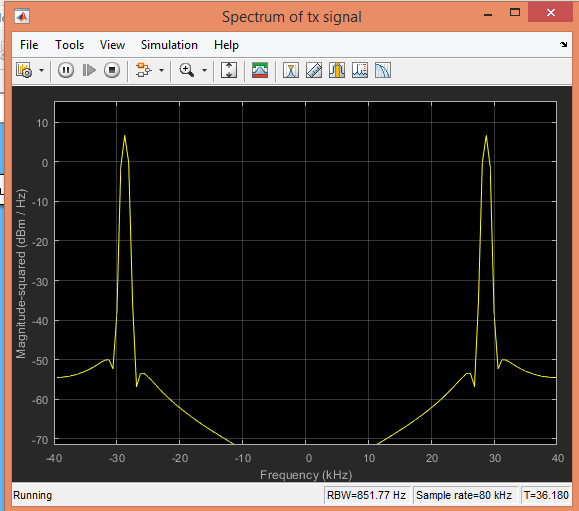
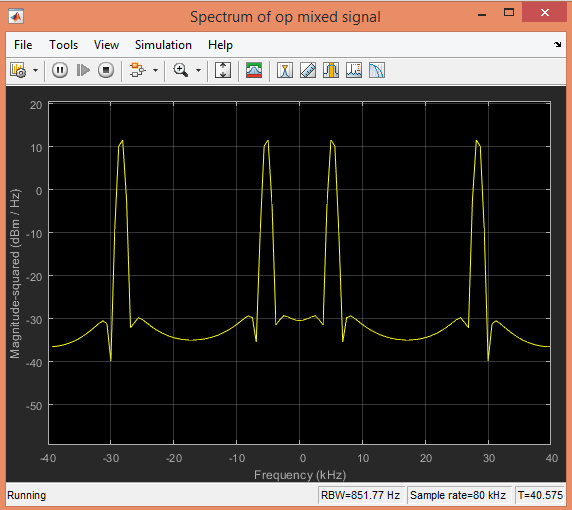
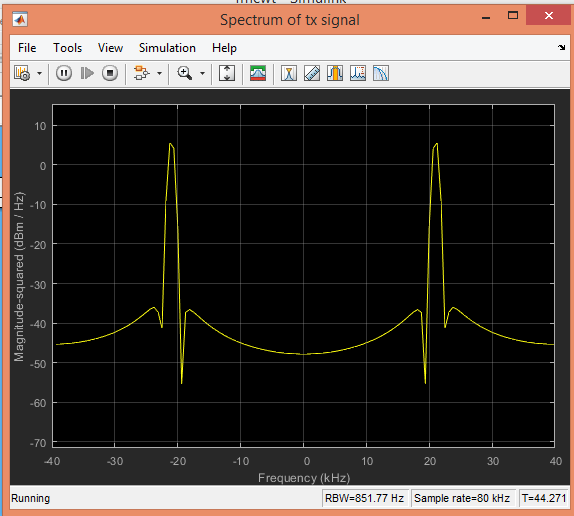
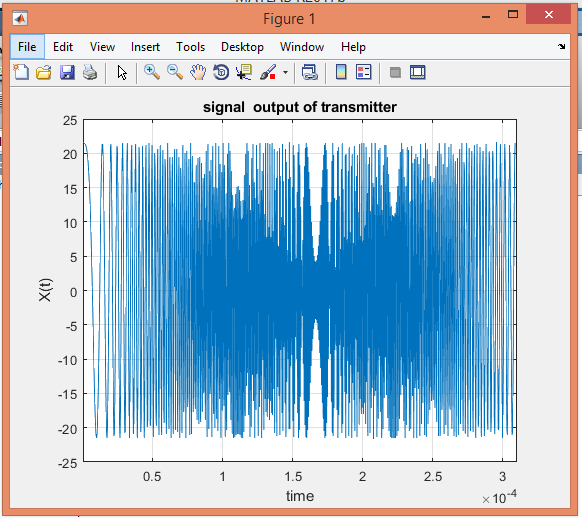
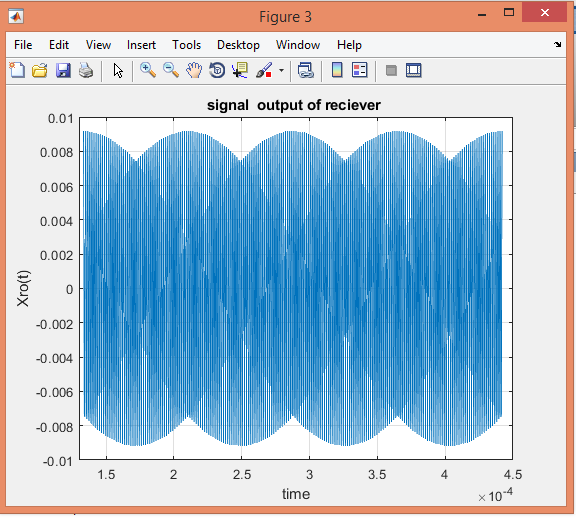
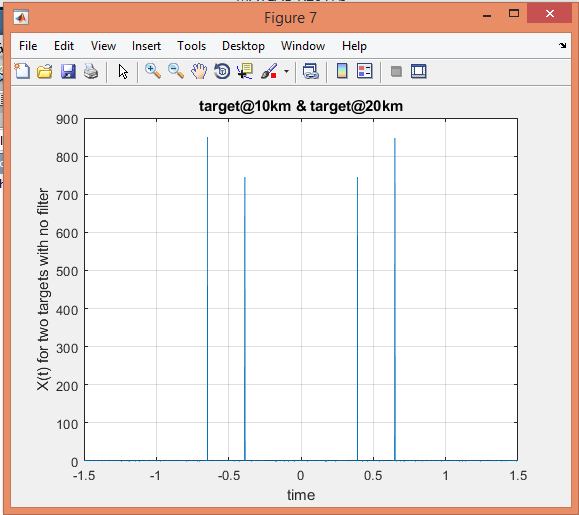
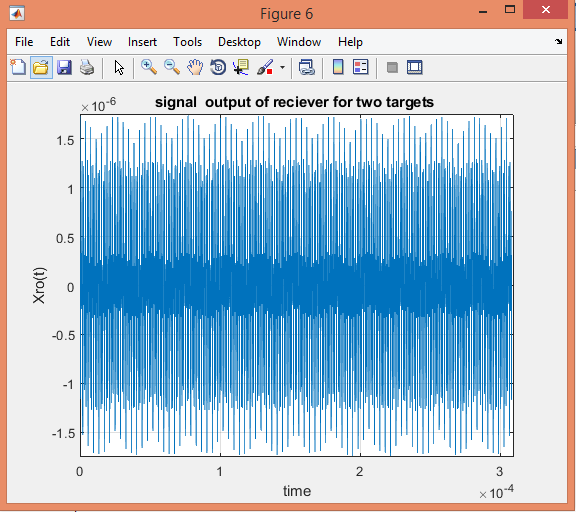
خروجی متلب :


لطفاً براي ارسال دیدگاه، ابتدا وارد حساب كاربري خود بشويد