تشخیص فرم حرکت انسان با کمک بینایی ماشین در متلب
تشخیص فرم حرکت انسان با کمک بینایی ماشین در متلب : پروژه متلب
پروژه متلب : در این پروژه با کمک بینایی ماشین فرم حرکت انسان را ابتدا با تصویر برداری از ویدیو را میتوانیم مشخص کنیم که برای اینکار از بینایی ماشین در متلب کمک خواهیم گرفت.
پروژه متلب : واژه بینائی ماشین مترادف با سیستم هایی است که برای انجام وظیفه خود، از حسگر بینائی با پردازشهای مناسب استفاده می کنند. رباتهای بینا زیرمجموعهای از این سیستمها هستند، که برای شناسایی و تعیین موقعیت اجسام و همچنین هدایت خود از حسگر بینائی استفاده می کنند.پروژه متلب : پردازشهای موجود در سیستمهای بینایی ماشین باید ساده، سریع و قابل انعطاف باشند. در این میان استفاده از ویژگی رنگ اجسام و هیستوگرام تصاویر از ساده ترین و پرکاربردترین پردازشها، در این سیستمها میباشد. از طرف دیگر شبکه های عصبی مصنوعی ابزار بسیار مناسبی برای ایجاد نگاشت ورودی – خروجی میباشند.
در واقع مهمترین دلیل استفاده از روش ردیابی بر پایۀ ویژگی و یا استفاده از آن در کنار یکی از روشهای ردیابی دیگر ایجاد یک الگوریتم ردیابی است که در مقابل تغییرات ناشی از تغییر شـدت روشنایی محیط و یا تغییر زاویۀ دید از قدرت بیشتری برخوردار باشد.
پروژه متلببسیاری از ویژگیها، برای مثال ویژگی لبه ، حساسیت کمتری در مقابـل ایـن تغییـرات دارنـد.
بعضی از ویژگیها مانند ویژگی گوشه نیز به طور محلی دارای قابلیت شناسایی دقیق هستند. مکـان این ویژگیها میتواند مکان مناسبی برای محاسبات هندسی مانند تخمین حرکت دوربین نسبت بـه صحنه باشد. ایجاد یک الگوریتم ردیابی مناسب بر پایۀ ویژگی ، در وهلۀ اول مستلزم شناخت کـافی از ویژگیها و مشخصات شئ ای که میخواهد ردیابی شود است تا بتوان از شناساگرهای متناسب بـا آنها استفاده کرد. اکثر الگوریتمهای ردیابی ویژگی ، یک حلقۀ چهار مرحله ای مطابق شـکل ۵-١ را
دنبال میکنند:
١) پیش بینی کردن
٢) شناسایی ویژگی
٣) مطابقت دادن
۴) بازیابی اطلاعات
پروژه متلبنخست مکان ویژگی در فریم بعدی بر اساس مکانهای قبلی آن و مدل حرکت پیش بینی می – شود. سپس تعدادی ویژگی کاندید شناسایی شده و با ویژگی اصلی مطابقت داده مـیشـوند. آنگـاه بهترین تطبیق بر اساس معیار تطبیق بهینه انتخاب میشود. البته الگوریتمهای ردیابی در اینکه چه ویژگیهائی را انتخاب کنند و پیش بینی را چگونه انجام دهند و چه معیار تطبیقی را بکار بگیرند بـا یکدیگر متفاوت هستند.
مرحلۀ پیش بینی بر پایۀ حرکت شئ از یک فریم به فریم بعدی و مدل حرکت انتخابی مـی- باشد پروژه متلب که مدل حرکت از مدلهای سـاده ماننـد مـدل سـرعت ثابـت تـا مـدلهای پـارامتری پیچیـده وحرکتهای با توزیع احتمال خاص میتواند باشد.
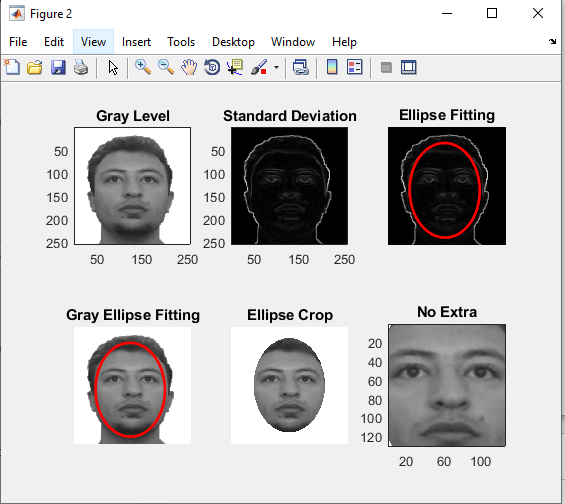
در بعضی از الگوریتمها، از مشخصات شکل و رنگ در کنار یکدیگر و در بعضی دیگر تنها از هیستوگرام نرمال شده رنگ ودر برخی، از هیستوگرام رنگ به همراه شناسایی دقیق طیـف رنگ برای شناسایی صورت استفاده می شود.
با تغییر زاویۀ دید و حرکات شئ و دوربین نسبت به یکدیگر، بسیاری از ویژگیها مانند شـکل ، اندازه ، محیط و مساحت شئ تغییر میکنند. اما یک ویژگی که نسبتاً ثابت بـاقی مـیمانـد، ویژگـی رنگ و یا هیستوگرام رنگ است . علاوه بر این ، شناسایی و دنبال کردن اشیاء بر اساس ویژگی رنـگ ساده است . الگوریتمهایی که از ویژگی رنگ استفاده میکنند، معمولاً الگوریتمهـای سـریع ، مـوثر و قابل کاربرد در سیستمهای ردیابی بی درنگ میباشند [٢٨]. البته باید توجه داشت که ممکن است این ویژگی همواره یک ویژگی کاملاً مطلوب در دنبال کردن اشیاء نباشد. مـثلاً زمـانی کـه چنـدین منبع نور رنگی و یا اشیاء مختلف با رنگهای متفاوت و در نتیجه سـطوح بازتـابش متفـاوت در فـضا وجود دارد، اطلاعات رنگ ویاهیستوگرام رنگ شئ میتواند تغییر کند. یک مثال ملموس آن ، سطوح خارجی و شیشه های اتومبیل هستند که شبیه آینه عمل کرده و با بازتابش نور باعث تغییـر طیـف روشنایی در دنبالۀ تصویر شده و لذا الگوریتمهای ردیابی مخصوصاً آنهایی که از آسـتانه گـذاری در ردیابی استفاده میکنند را با مشکل روبه رو میسازند. این مشکل در الگوریتمهـای ردیـابی صـورت نیز بسیار بوجود میآید. بنابراین واضح است که در صورتی که تـصاویر نخـست در مقابـل تغییـرات
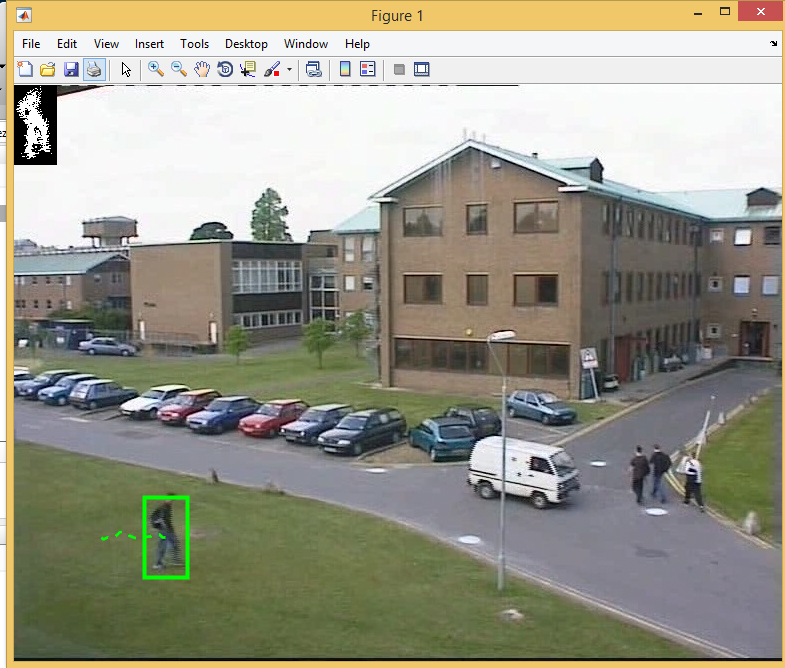
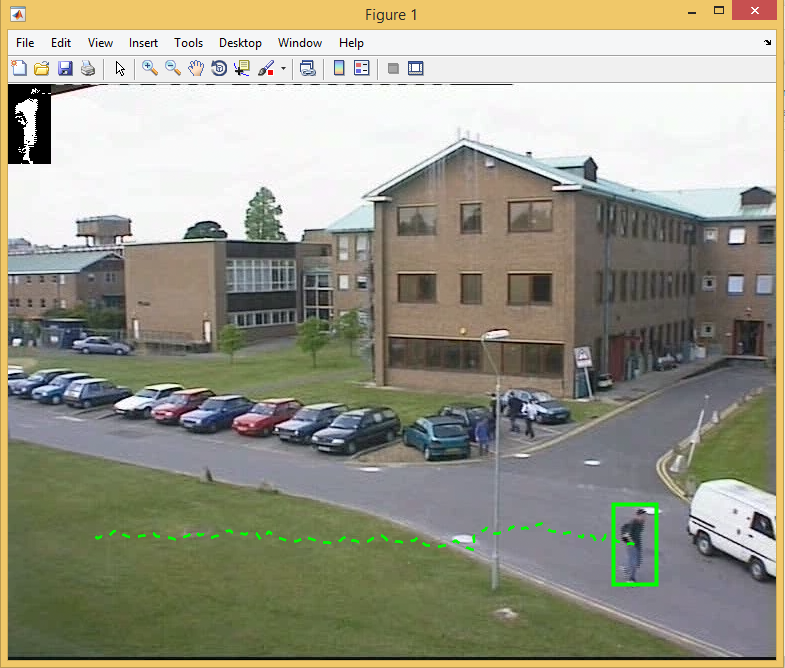
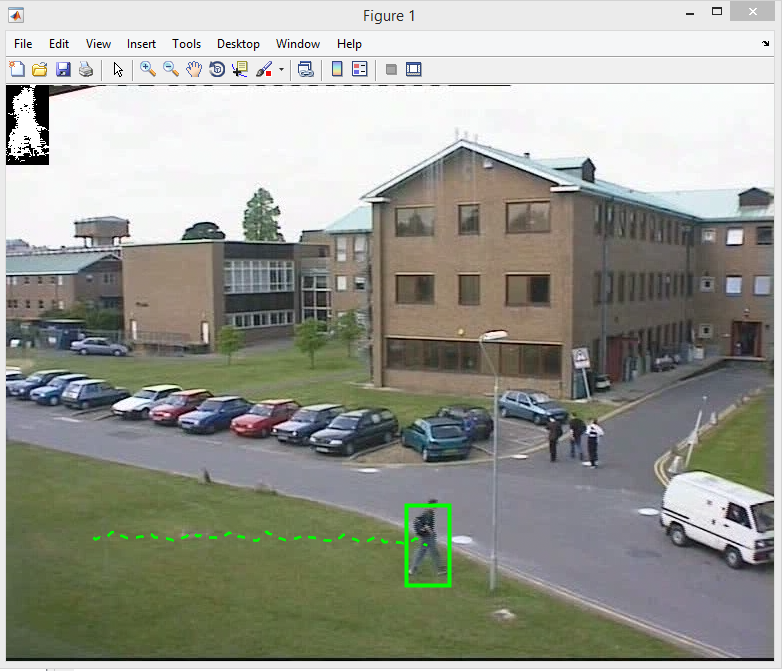
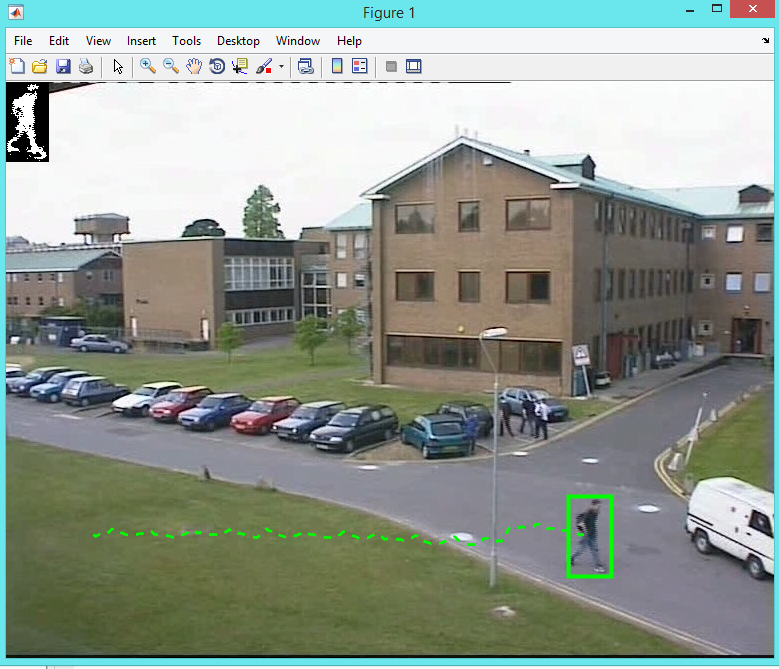
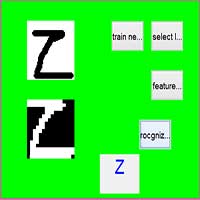
خروجی متلب :

لطفاً براي ارسال دیدگاه، ابتدا وارد حساب كاربري خود بشويد