کنترل پرواز پهباد uav با کنترل فازی در متلب :پروژه متلب
کنترل پرواز پهباد uav با کنترل فازی در متلب :پروژه متلب
پرنده هدایتپذیر از دور یا به اختصار پَهپاد که به آن وسیله هوایی بدون سرنشین نیز گرفته میشود، نوعی وسیله هوایی هدایتپذیر از راه دور است.
کنترل پهپاد بدون استفاده از انسان در درون آن صورت میگیرد. اگر چه انسان نیز میتواند به عنوان محموله در آن باشد. این وسیله پرنده از نیروهایایرودینامیکی برای پرواز در مسیر دلخواه استفاده میکند. پهپادها یا بوسیله کنترل از راه دور یا با برنامههای پیش پروازی ریخته شده از قبل یا با سامانههای خودکار دینامیک هدایت میشوند. پهپادها در حال حاضر در برنامههای نظامی که شامل جاسوسی، حملات انتحاری، حمله موشکی و بمباران میشود فعالیت میکنند. این هواپیماها همچنین در برنامههای غیرنظامی مانند عملیات امداد و نجات، خاموش کردن آتشسوزیها در جایی که پرواز برای خلبان خطر دارد، کنترل پلیس در ناآرامیها و اغتشاشات ، مرزبانی و شناسایی بیشتر حوادث غیرمترقبه طبیعی استفاده میشوند.
بیشترین سرمایهگذاری در جهان در زمینه ساخت و تجهیز پهپادها را وزارت دفاع ایالات متحده آمریکا انجام دادهاست؛ به طوری که بین سالهای ۱۹۹۰ تا۱۹۹۵ حدود ۳ میلیارد دلار هزینه برای طراحی ساخت و تجهیز پهپادها هزینه کردهاست. حادثه ۱۱ سپتامبر ۲۰۰۱ باعث شد تا دولت آمریکا بودجه بیشتری را به طراحی و ساخت و تجهیز پهپادها اختصاص دهد.
تاریخچه
برادران رایت توانستند با استفاده از نبوغ و خلاقیت خود در دهم دسامبر ۱۹۰۳ که آرزوی دیرینه بشر را که پرواز بود تحقیق بخشند و از زمانی که اسحاق نیوتن فیزیکدان انگلیسی ، نیروی جاذبه را کشف کرد، فکر پرواز و غلبه بر نیروی جاذبه در انسان شدت بیشتری یافت. برادران رایت که یک مغازه تعمیرات دوچرخه داشتند، همیشه در فکر پرواز بودند.
آنها بر اساس اطلاعات و مطالعات که در مورد پرواز داشتند به ساخت بالها و طراحی هواپیما پرداختند. سپس یک تونل باد کوچک ساخته و اجزای آیرودینامیکی هواپیمای خود را که از طراحی کاملا نوین و پیشرفته برخوردار بود، آزمایش کردند. و اولین پرواز قابل کنترل هواپیما را انجام دادند. زمانی که هواپیما به پرواز در میآید تحت تاثیر نیروهای آیرودینامیکی قرار میگیرد.
نیروی آیرودینامیکی
نیروی آیرودینامیک در اثر وزش باد بر روی یک جسم تولید میشود. این جسم میتواند تیر چراغ برق ، یک آسمان خراش ، پل ، هواپیما و یا کابل برق فشار قوی باشد. اما بازتاب نیروی آیرودینامیکی که ایجاد میشود، بستگی به شکل این جسم خاص که در معرض وزش باد قرار گرفته است. اگر هم پهن و دارای زاویه تند باشد در برابر باد مقاومت میکند و در جهت وزش باد خم میشود. اما اگر دارای زوایای خمیده و یا نیمدایره باشد، مقاومت کمتری نسبت به سایر اجسام خواهند داشت. نیروهای آیرودینامیکی شامل چهار نیرو میشود، که این نیروها عبارتند از :
نیروی برا (LIFT)
نیروی برا ، نیرویی است که باعث بالا رفتن هواپیما یا هلیکوپتر و اجسام برنده ایجاد میشود. برای اینکه این نیرو ایجاد شود باید جسم مورد نظر شکل خاصی داشته باشد، مطلوبترین شکل میتواند به صورت یک قطره آب و یا یک جسم که یک طرفش نیمدایره و طرف مقابل آن زاویه تند داشته باشد. اگر این جسم به گوشهای در جریان هوا قرار گیرد که باد از سمت جسم که حالت نیمدایره دارد بوزد و از طرف مقابل که زاویه تندی دارد جسم را ترک کند، نیروی برا ایجاد خواهد شد. وقتی که مولکولهای هوا با لبه جلوی بال برخورد میکند، تعدادی به سمت بالا و تعدادی به سمت پایین بال متمایل میشوند. هر دو گروه مولکولها میبایستی در انتهای بال همزمان به یکدیگر برسند. چون بالای بال هواپیما انحنای بیشتری دارد و مسافت آن نسبت به زیر بال بیشتر است.
در نتیجه مولکولهایی که از سطح بالایی عبور میکنند. میبایستی با سرعت بیشتری حرکت کنند تا با مولکولهای سطح پایین همزمان به انتهای بال هواپیما برسند. این عمل باعث کاهش فشار هوا در سطح بالا نسبت به سطح پایین بال خواهد شد. اشاره به اصل برنولی وقتی که سرعت هوا در سطح بالای بال بیشتر از سطح پایینی آن باشد، فشار در سطح بالایی کم میشود. حال که فشار هوا در قسمت بالای بال کاهش مییابد و یک خلا نسبی ایجاد میشود که جسم را به طرف خود میکشد. این خلا نسبی همان نیروی برا میباشد که باعث بالا رفتن هواپیما میشود. هر چقدر سرعت هواپیما بیشتر باشد مقدار خلا نسبی نیز بیشتر میشود.
نیروی وزن (WEIGHT)
زمانی که ما روی زمین قرار گرفتهایم وزن ما بطور عمود بر مرکز زمین وارد میشود. وزن ما باعث قرار گرفتن روی زمین و نیز جاذبهای که برما وارد میشود با وزن ما برابر خواهد بود. طبق قانون نیوتن ، نیروی جاذبهای که بر جسم ما وارد میشود برابر با یک خواهد بود.
برای اینکه هواپیما به پرواز درآیند باید بر نیروی جاذبه غلبه کند. وزن همیشه در جهت مخالف نیروی برا است.
نیروی رانش (THRUST)
وقتی جسمی از زمین بلند شده و در فضا قرار میگیرد، باید نیروی رانش کافی داشته باشد. به عبارت دیگر نیروی رانش باعث میشود تا هواپیما به طرف جلو حرکت کرده و جریان لازم را ایجاد کند. جریان ایجاد شده تولید نیروی برا این کار را خواهد کرد. در هواپیما نیروی رانش بوسیله موتور فراهم میشود.
نیروی پسا (DRAG)
· طبق قانون نیوتن هر عملی یک عکسالعمل در جهت مخالف خواهد داشت به دلیل اینکه نیروی رانش باعث جلو رفتن هواپیما میشود. افزایش این نیرو باعث افزایش نیروی پسا خواهد شد. وجود نیروی پسا یک امر اجتناب ناپذیر است ولی کارشناسان ، طراحان و سازندگان هواپیما سعی میکنند در حین پرواز از مقدار نیروی پسا کاسته شود.
· شکل هواپیما ، هر قدر بالها نازکتر یا محل اتصال اجزا خارجی با بدنه زاویههایی تند نداشته باشد، بخشی از نیروی پسا کاهش مییابد. بستگی به شکل خاص اجزایی که در تولید نیروی برا نقش دارند. مانند بالها ، و بخشی از بدنه . برای اینکه هواپیما بتواند سرعتهای کم به اندازه کافی نیروی برا و در سرعتهای زیاد از تولید نیروی پسا کاسته شود بالهای آن را به گونهای مناسب طراحی میکنند.
· پس متوجه میشویم که با افزایش نیروی رانش بر سرعت هواپیما افزوده میشود. با افزوده شدن سرعت هواپیما ، جریان هوا نیز افزایش یافته و نیروی برا افزایش مییابد تا بر وزن هواپیما غلبه کند. با افزایش نیروی برا و رانش بر میدان نیروی پسا نیز افزوده خواهد شد. اما زمانی که هواپیما در مسیر پرواز قرار میگیرد کلیه نیروها به حالت تعادل در آمده و هواپیما با سرعت ثابتی به پرواز خود ادامه میدهد.
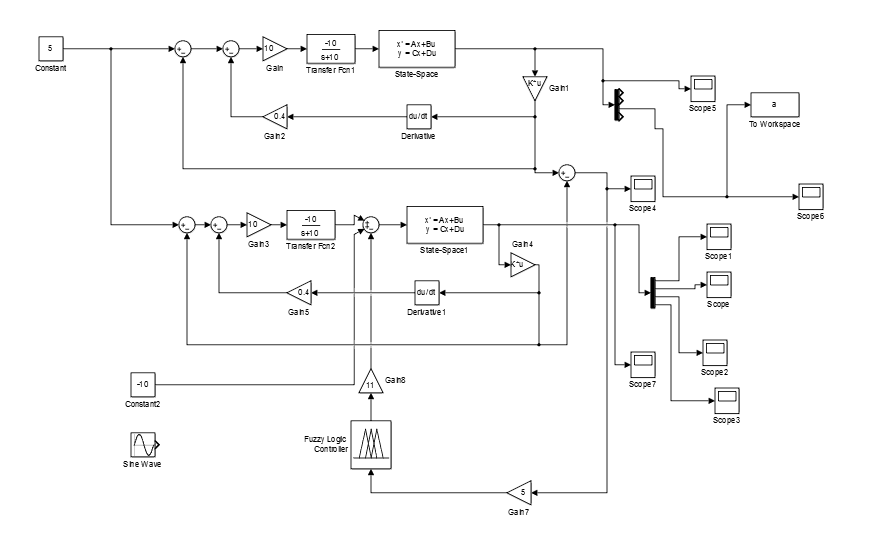
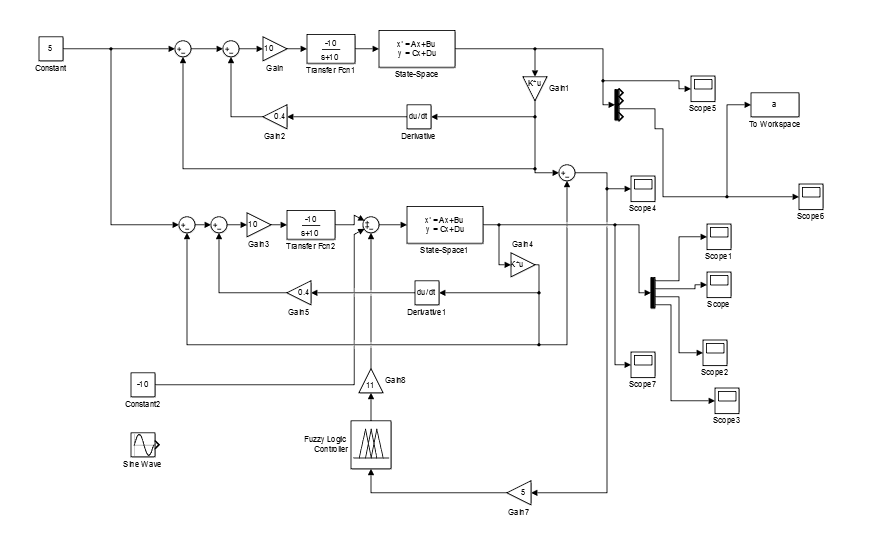
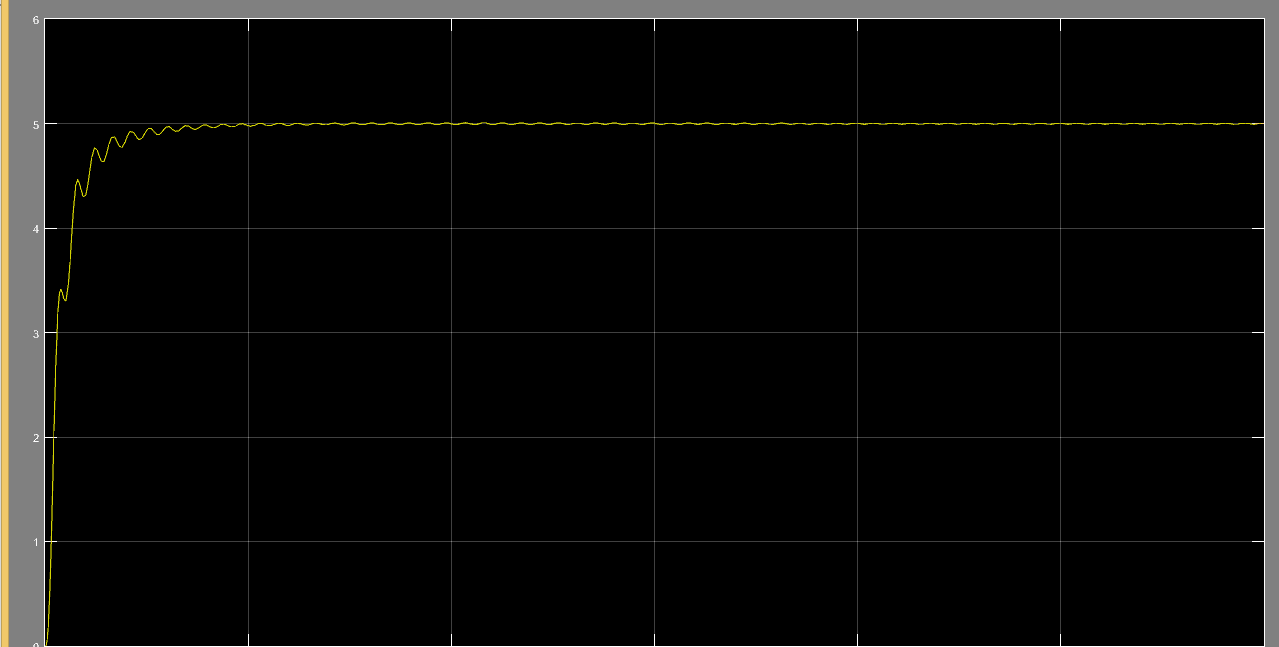
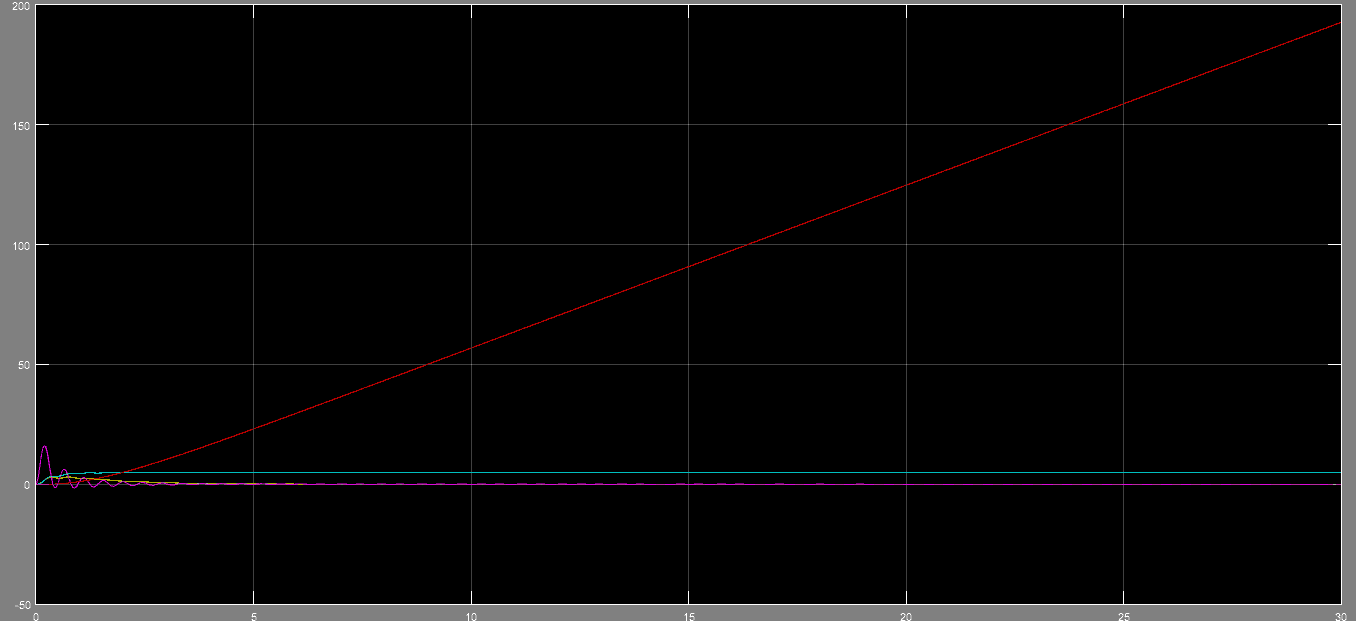
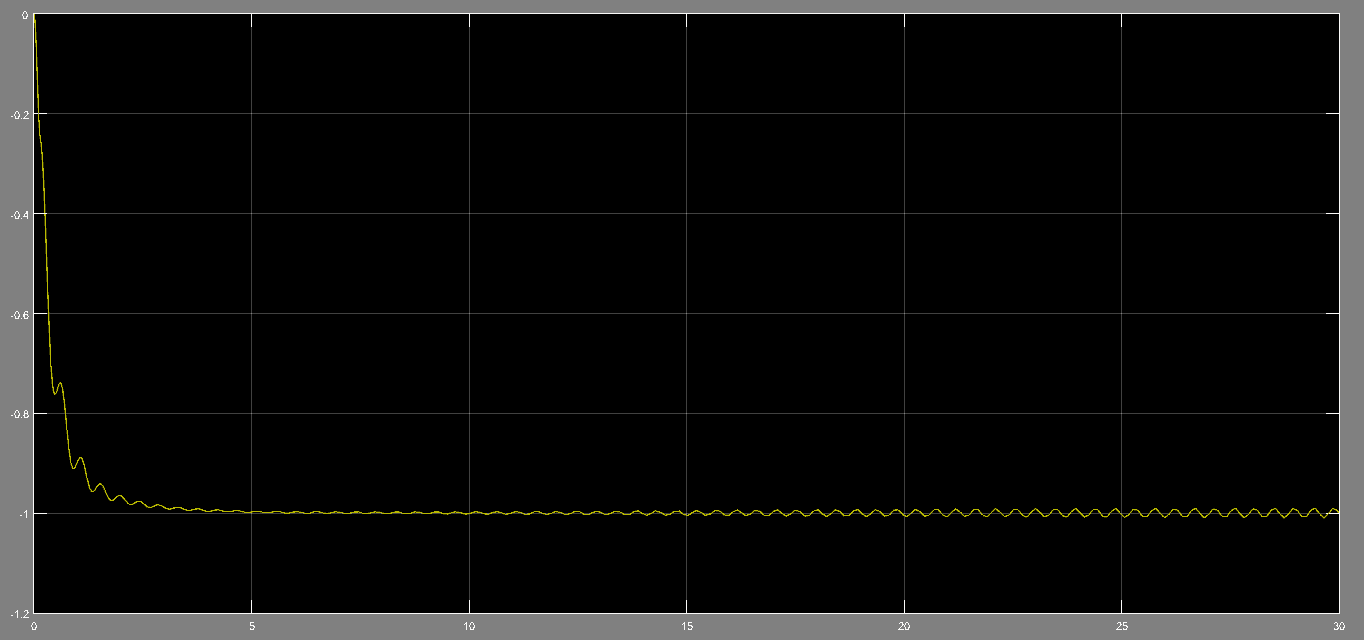
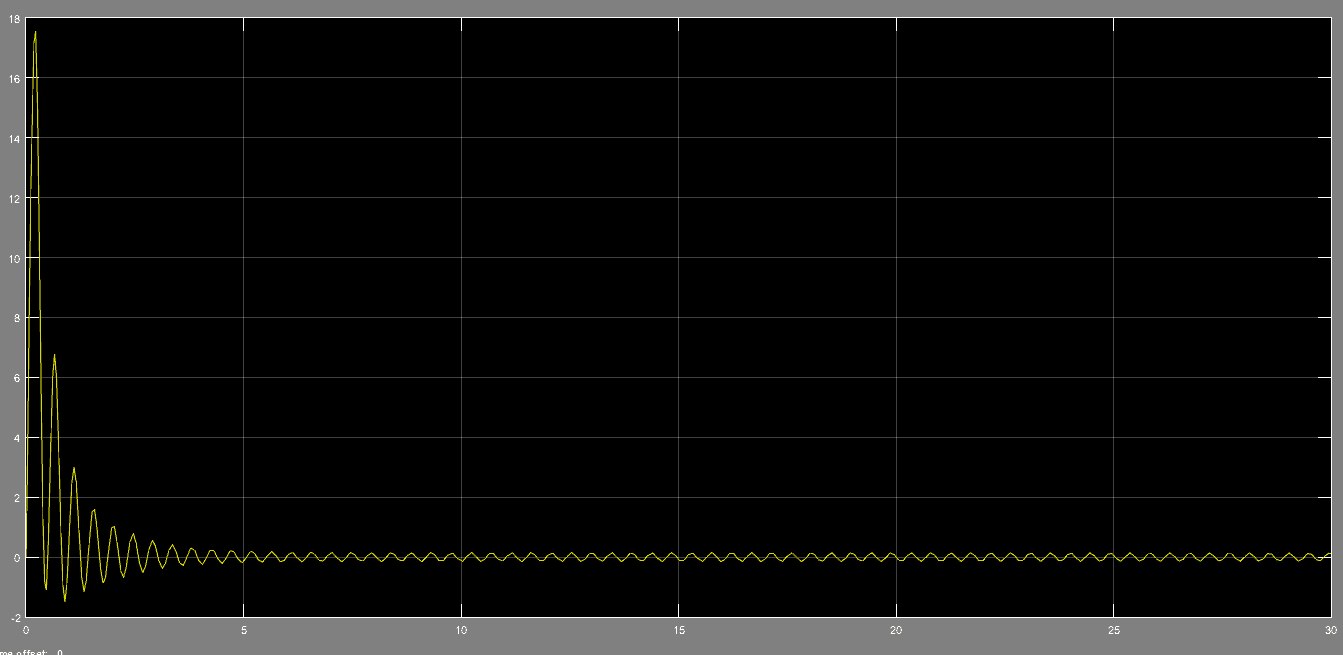
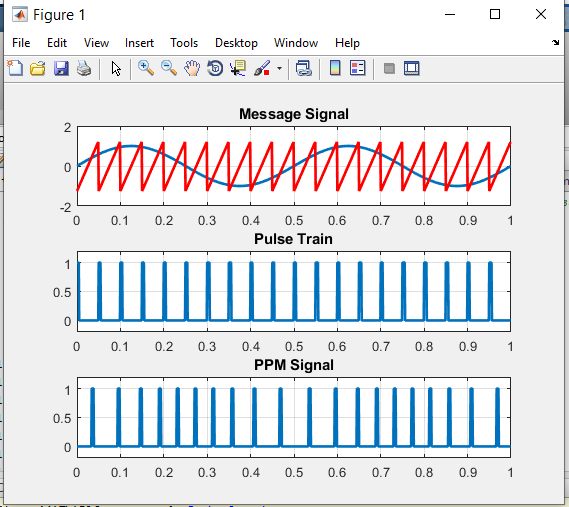
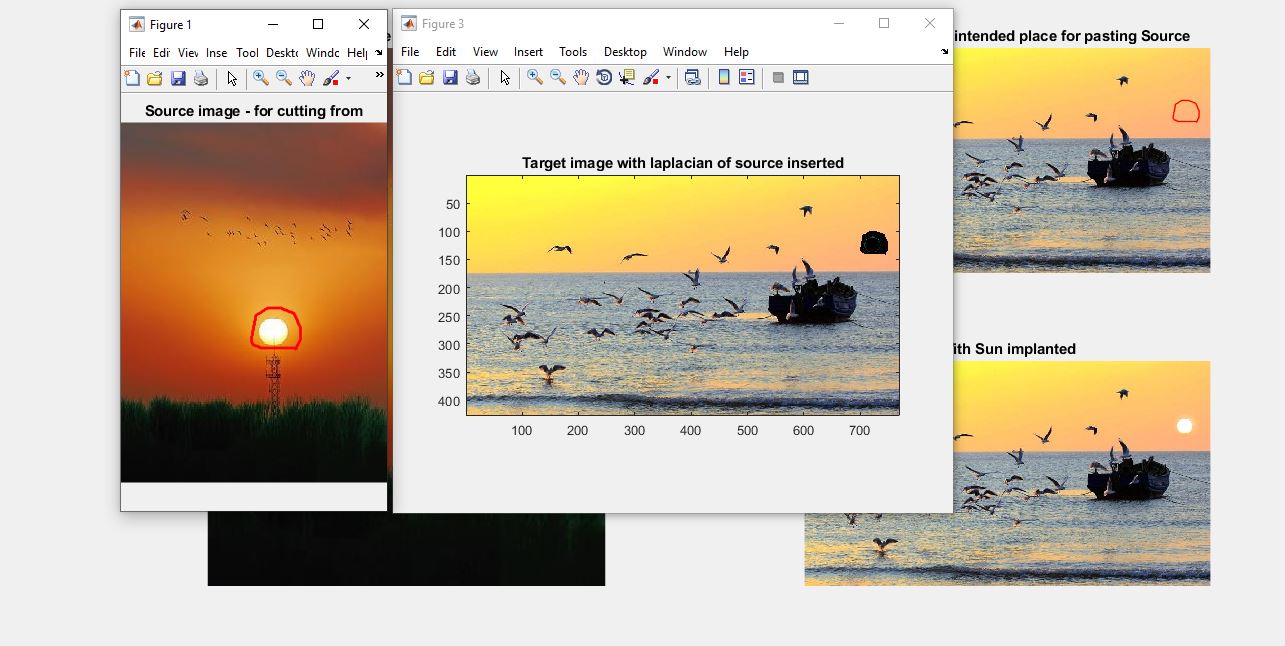
خروجی متلب :
لطفاً براي ارسال دیدگاه، ابتدا وارد حساب كاربري خود بشويد