تخمین متغیرهای پرواز هواپیما با فیلتر کالمن در متلب
تخمین متغیرهای پرواز هواپیما با فیلتر کالمن در متلب: انجام پروژه متلب
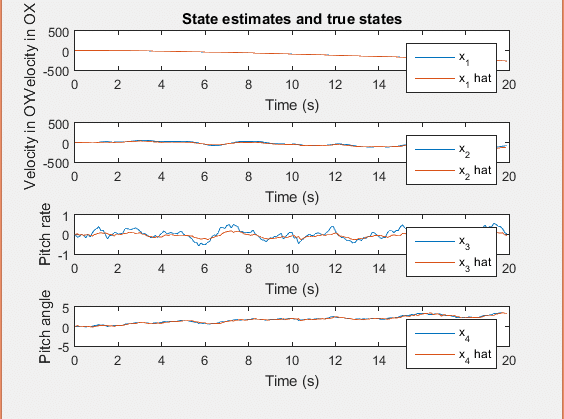
:انجام پروژه متلب: در چند دهه ی گذشته، تعیین متغیرهای حالت یک سیستم دینامیکی مخدوش با نویز توجه بسیاری از محققان را به خود جلب نموده است. فیلتر کالمن کلاسیک یکی از متداول ترین روش ها جهت تخمین بهینه ی متغیرهای حالت یک سیستم دینامیکی خطی است. همچنین فیلتر کالمن توسعه یافته (EKF) و فیلتر کالمن آنسنتد (UKF) جهت تخمین سیستم های غیرخطی ارائه شده اند. در روش UKF، مبنای تخمین بر اساس مجموعهای از نقاط سیگمای متقارن حول نقطه میانگین برآورد شده در گام پیشین است. عملکرد فیلتر کالمن به شدت تحت تاثیر مقادیر …

انجام پروژه متلب:فیلتر کالمان (به انگلیسی: Kalman filter) که به عنوان تخمین خطی مرتبه دوم نیز از آن یاد میشود، الگوریتمی است که حالت یک سیستم پویا را با استفاده از مجموعهای از اندازهگیریهای شامل خطا در طول زمان برآورد میکند. این فیلتر معمولاً تخمین دقیقتری را نسبت به تخمین بر مبنای یک اندازهگیری واحد را بر مبنای استنباط بیزی و تخمین توزیع احتمال مشترکی از یک متغیر تصادفی در یک مقطع زمانی ارائه میکند. این فیلتر از نام رودولف ئی کالمن، یکی از پایهگذاران این تئوری گرفته شدهاست.
انجام پروژه متلب:فیلتر کالمان کاربردهای بسیاری در علم و فناوری مانند مسیریابی و پایش وسایل نقلیه، به خصوص هواپیما و فضاپیماها، دارد. فیلتر کالمان مفاهیم گستردهای را در زمینه سریهای زمانی، پردازش سیگنال و اقتصادسنجی مطرح میکند. این فیلتر از مفاهیم پایه در زمینه برنامهریزی و پایش رباتها و همچنین مدلسازی سیستم عصبی محسوب میشود. بر اساس تأخیر زمانی میان ارسال فرامین و دریافت پاسخ آنها، استفاده از فیلتر کالمان در تخمین حالات مختلف سیستم را ممکن میسازد.
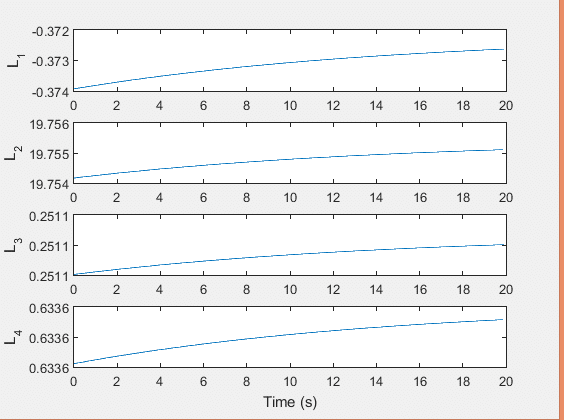
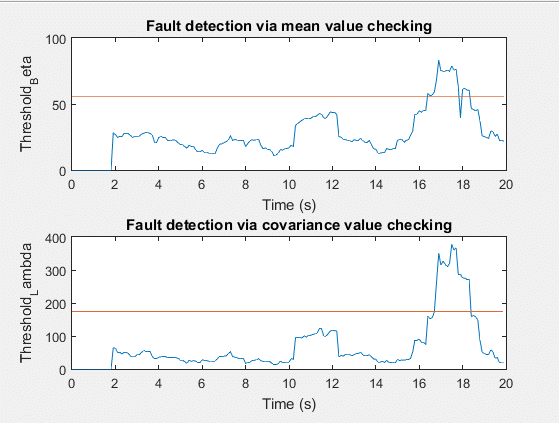
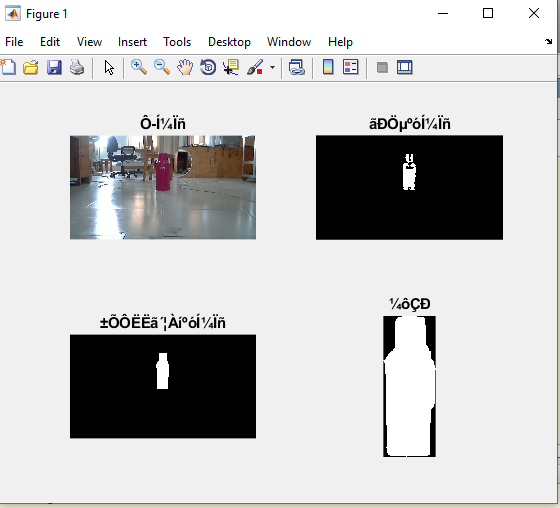
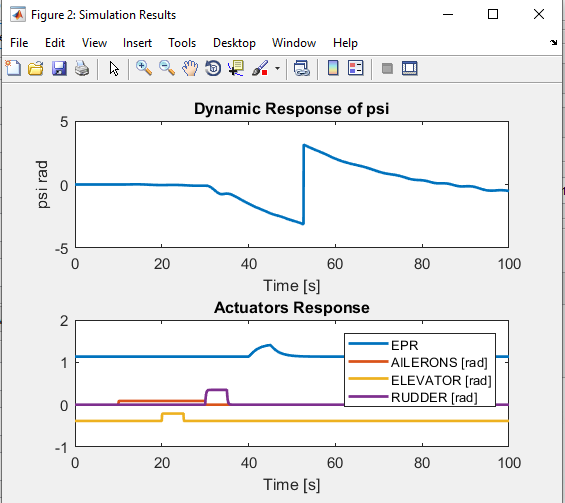
خروجی متلب:
لطفاً براي ارسال دیدگاه، ابتدا وارد حساب كاربري خود بشويد