شبیه سازی فازی دوگانه بر روی سیستم موتور dc در متلب
شبیه سازی فازی دوگانه بر روی سیستم موتور dc در متلب : شبیه سازی متلب
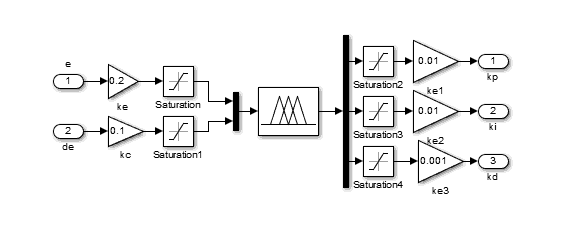
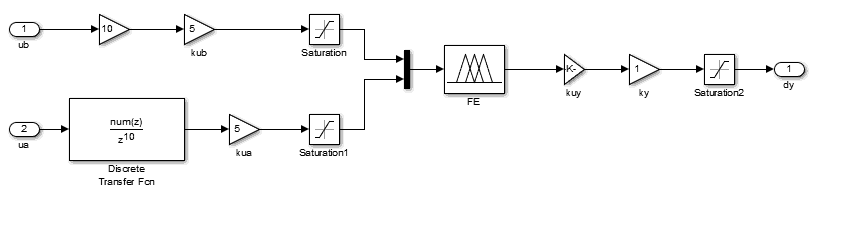
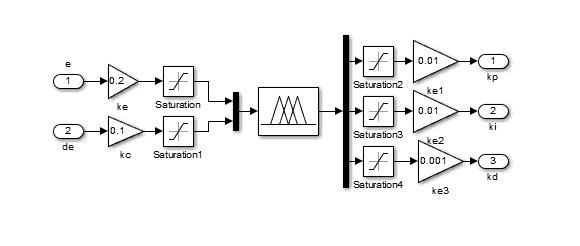
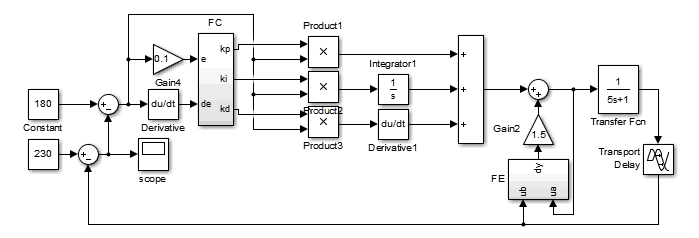
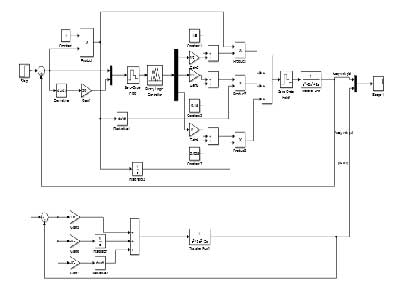
شبیه سازی متلب در این سیستم خروجی کنترلر فازی اول وارد کنترلر pid شده و سپس خروجی pid فازی شده به کنترلر دوم فازی رفته و سپس از خروجی اول کسر شده تا خطای ردیابی به صفر برسد که میتوان برای هر سیستمی این کنترلر را بکار برد تنها کافی است معادلات فضای حالت سیستم مورد نظر را بدست آورید.
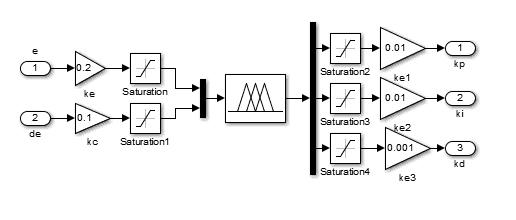
کنترلر فازی :
شبیه سازی متلب استفاده از منطق فازی و سیستم های فازی برای کنترل سیستم های مختلف، باعث ایجاد و گسترش راه کار هائی جدید در جهت بهینه تر کردن فرآیند های کنترلی شده است. این گفته می تواند با در نظر گرفتن عملکرد سیستم های فازی و همچنین توانائی آن ها در ایجاد سیستم های غیر خطی به خوبی اثبات شود.این سیستم ها همچنین دارای معایبی نیز می باشند، بدین صورت که این سیستم های کنترلی دارای محدودیت هایی از جهت آنالیز میباشند که از پیچیدگی بیان ریاضی غیر خطی آن ها نشئت میگیرد.
احتیاجی به دانستن دینامیک سیستم تحت بررسی نیست.
البته نمی توان گفت که مستقل مستقل از مدل چرا که در طراحی این کنترلر ها نیز میبایست اطلاعاتی از ورودی و خروجی سیستم موجود باشد که این اطلاعات از آزمایش و یا این که از تجربهی متخصصین آشنا به سیستم به دست میآید.
کنترلر های فازی مستقل از مدل
طراحی صحیح و خطای ذهنی
این روش احتمالا اولین تکنیکی است که در طراحی سیستم های فازی مورد استفاده قرار گرفته است. در این روش از اطلاعات متخصصی که سیستم را به صورت دستی کنترل می کرده استفاده میشود بدین صورت که از اطلاعات وی که به صورت تجربی حاصل شده است قواعد فازی کنترلر نوشته میشود.
به صورت کلی در این نوع کنترلر ها در طراحی کنترلر اتوماتیک مورد استفاده قرار نمیگیرند و تنها به عنوان یک کنترلر کمکی برای اپراتور عمل می کنند. موفقیت طراحی این کنترلر ها در موارد متعددی گزارش شده است شبیه سازی متلب از جمله کنترل خشک کردن سیمان، مراحل راه اندازی دیگ بخار آب، تولید پودر رخت شوئی، سوزاندن زباله ها و گندزدائی آب.
طراحی کنترلر های فازی به مانندPID
در طراحی این کنترلر ها از آزمایشاتی استفاده میشود که در تنظیم پارامتر های PID نیز مورد استفاده قرار میگیرد. همانطور که کنترلر های PID مستقل از مدل میباشند یا اینکه برمبنای مدل ساده ای به مانند پاسخ پلهی سیستم طراحی می شوند،شبیه سازی متلب این کنترلر ها نیز بدین گونه میباشند. بدیهی است که بتوانیم معادل با یک کنترلر PID با محدودیت ورودی و خروجی، یک کنترلر فازی طراحی بنمائیم.
روش طراحی کنترلر فازی به صورت PID بدین صورت میباشد که:
۱- در ابتدا میبایست یک کنترلر PID بر مبنای روش های ابتدائی به مانند زیگلر نیکلز طراحی کنیم.
۲- یک کنترلر فازی برابر با PID طراحی شده ایجاد کنیم.
۳- حال تنظیم بیشتر کنترلر فازی را بر اساس آنچه رویت میشود انجام میدهیم.
می بایست یک فازی کنترلر با سه ورودی خطا و تغییرات خطا و انتگرال خطا طراحی کنیم که در این صورت تعداد قواعد فازی به شدت زیاد می شود که برای رفع این مشکل آن را به دو بخش PD وI تقسیم میکنند
کنترلر فازی می تواند دقیقاً به صورت کپی از کنترلرPID طراحی شود. به عبارت دیگر کنترلر فازی یک کنترلر PID است که ضرایبش در نقاط کار متفاوت تغییر میکند و این تغییر به گونه ای است که خروجی آن در مواردی که سیستم غیر خطی نیز می باشد به صورت نرم تغییر می کند.
کنترل فازی بر مبنای مدل
استفاده از روش تطبیقی
استفاده از سنتز مستقیم
زمان بندی گین فازی
Fuzzy Gain Scheduling
استفاده از روش تطبیقی
یادگیری معکوس:
اساس طراحی این کنترلر بر مبنای تولید یک مدل معکوس میباشد بدین صورت که در این حالت کنترلر می بایست با اعمال ورودی به سیستم آن را از حالت به حالت ببرد.
برای استفاده از این روش فرض بر این است که حالت سیستم قابل اندازه گیری میباشد و در ضمن دینامیک سیستم نیز میبایست گسسته باشد یا اینکه حداقل نمونه برداری شده و با تابع زیر قابل بیان باشد.
که در این حالتK بیانگر زمان گسسته، حالت سیستم و ورودی سیستم میباشد. حالت سیستم در زمان K+N با رابطهی زیر بیان میشود.
کنترل فازی تطبیقی مستقیم یا یادگیری ویژه:
در این حالت ایجاد کنترلر فازی به صورت آنلاین اتفاق می افتد به عبارتی دیگر به صورت همزمان با عملکرد سیستم، کنترلر فازی به گونه ای اطلاح می شود که فرآیند کنترلی به صورت بهینه پیش رود.
استفاده از روش کنترل فازی تطبیقی مستقیم این امکان را فراهم می آورد تا بتوانیم یک کنترلر بهینهی فازی طراحی کنیم. البته ذکر این نکته نیز خالی از لطف نمیباشد که در این حالت نیازمند مدلی از سیستم هستیم که دینامیک های مدل را به خوبی نشان دهد.
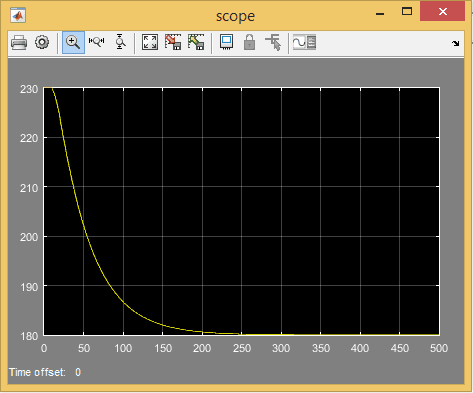
خروجی متلب :
لطفاً براي ارسال دیدگاه، ابتدا وارد حساب كاربري خود بشويد