کنترل ربات با الگوریتم کالمن توسعه یافته
کنترل ربات با الگوریتم کالمن توسعه یافته :پروژه آماده متلب
پروژه آماده متلب : فیلتر کالمن از جمله فیلتر های کارآمد جهت تخمین حالت های (State) یک سیستم با کم ترین خطای ممکن است. این فیلتر با الگوریتمی بازگشتی (Recursive) و داشتن توزیع نویز ها و به کارگیری عملگر های ماتریسی حالت های جدید سیستم را در فضای گسسته پیش بینی می کند. مقاله ی پیوست شده از Dan Simon به شکلی ساده طراحی یک فیلتر کالمن را همراه با سورس کد متلب آن شرح می دهد.
فیلتر کالمَن (به انگلیسی: Kalman filter) که به عنوان تخمین خطی مرتبه دوم نیز از آن یاد میشود،
پروژه آماده متلب : الگوریتمی است که حالت یک سیستم پویا را با استفاده از مجموعهای از اندازهگیریهای شامل خطا در طول زمان برآورد میکند. این فیلتر معمولاً تخمین دقیقتری را نسبت به تخمین بر مبنای یک اندازهگیری واحد را بر مبنای استنباط بیزی و تخمین توزیع احتمال مشترکی از یک متغیر تصادفی در یک مقطع زمانی ارائه میکند. این فیلتر از نام رودولف ای کالمن، یکی از پایهگذاران این تئوری گرفته شدهاست.
پروژه آماده متلب :فیلتر کالمن کاربردهای بسیاری در علم و فناوری مانند مسیریابی و پایش وسایل نقلیه، به خصوص هواپیما و فضاپیماها، دارد. فیلتر کالمن مفاهیم گستردهای را در زمینه سریهای زمانی، پردازش سیگنال و اقتصادسنجی مطرح میکند. این فیلتر از مفاهیم پایه در زمینه برنامهریزی و پایش رباتها و همچنین مدلسازی سیستم عصبی محسوب میشود. بر اساس تأخیر زمانی میان ارسال فرامین و دریافت پاسخ آنها، استفاده از فیلتر کالمن در تخمین حالات مختلف سیستم را ممکن میسازد.
پروژه آماده متلب :این الگوریتم در دو گام اجرا میشود. در گام پیشبینی، فیلتر کالمن تخمینی از وضعیت فعلی متغیرها را در شرایط عدم قطعیت ارائه میکند. زمانی که نتیجه اندازهگیری بعدی بدست آید، تخمین قبلی با میانگین وزندار آپدیت میشود. به این ترتیب که وزن اطلاعاتی که دارای قطعیت بیشتری هستند، بیشتر خواهد بود. الگوریتم بازگشتی میباشد و با استفاده از ورودیهای جدید و حالات محاسبه شدهٔ قبلی بهصورت بیدرنگ اجرا میشود.
درمورد ورودیهای فیلتر کالمن نمیتوان بیان کرد که تمام خطاها گوسی هستند. اما در عمل فیلتر برآوردهای احتمالاتی را با فرض توزیع طبیعی داشتن انجام میدهد.
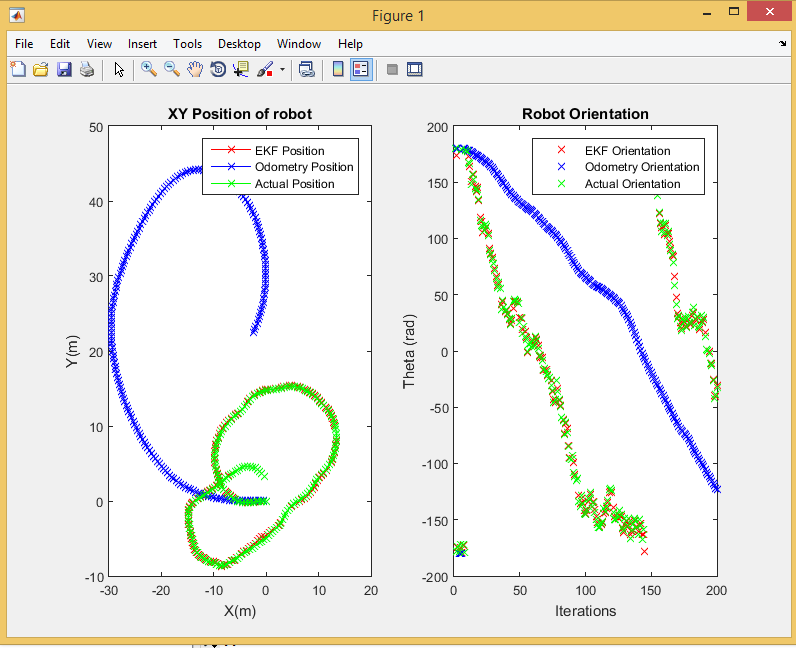
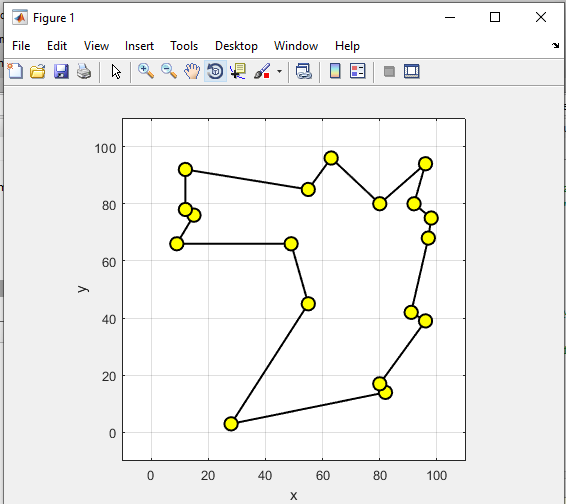
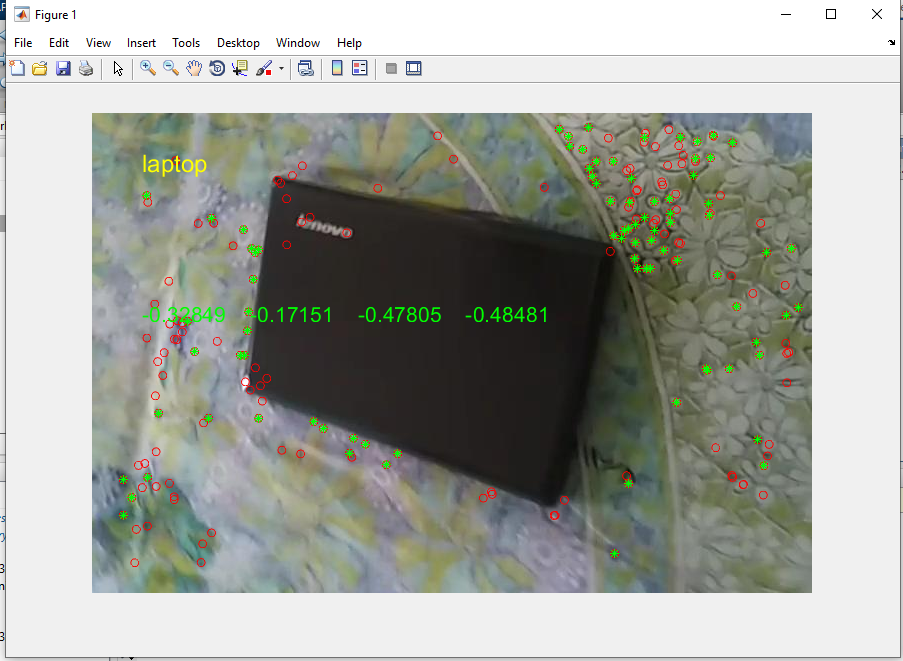
خروجی متلب :


لطفاً براي ارسال دیدگاه، ابتدا وارد حساب كاربري خود بشويد