پروژه برنامه ریزی مسیر ربات با الگوریتم ژنتیک با نرم افزار MATLAB (پروژه عالی رباتیک)
پروژه برنامه ریزی مسیر ربات با الگوریتم ژنتیک با نرم افزار MATLAB (پروژه عالی رباتیک،هوش مصنوعی و…) :پروژه متلب آماده
پروژه متلب آماده : الگوریتم های ژنتیک (به انگلیسی: Genetic Algorithm)، (با نماد اختصاری GA) تکنیک جستجویی در علم رایانه برای یافتن راهحل تقریبی برای بهینهسازی و مسائل جستجو است. الگوریتم ژنتیک نوع خاصی از الگوریتمهای تکامل است که از تکنیکهای زیستشناسی فرگشتی مانند وراثت و جهش استفاده میکند. این الگوریتم برای اولین بار توسط جان هالند معرفی شد.
پروژه متلب آماده :در واقع الگوریتمهای ژنتیک از اصول انتخاب طبیعی داروین برای یافتن فرمول بهینه جهت پیشبینی یا تطبیق الگو استفاده میکنند. الگوریتمهای ژنتیک اغلب گزینه خوبی برای تکنیکهای پیشبینی بر مبنای رگرسیون هستند. در هوش مصنوعی الگوریتم ژنتیک (یا GA) یک تکنیک برنامهنویسی است که از تکامل ژنتیکی به عنوان یک الگوی حل مسأله استفاده میکند. مسئلهای که باید حل شود دارای ورودیهایی میباشد که طی یک فرایند الگوبرداری شده از تکامل ژنتیکی به راهحلها تبدیل میشود سپس راه حلها بعنوان کاندیداها توسط تابع ارزیاب (Fitness Function) مورد ارزیابی قرار میگیرند و چنانچه شرط خروج مسأله فراهم شده باشد الگوریتم خاتمه مییابد. الگوریتم ژنتیک بطور کلی یک الگوریتم مبتنی بر تکرار است که اغلب بخشهای آن به صورت فرایندهای تصادفی انتخاب میشوند.
پروژه متلب آماده :اجزای مکانیکی و مکانیزمهای ربات
یاتاقان
یاتاقان های لغزشی
یاتاقان های غلتشی:
– بلبرینگ
– رولربرینگ
– یاتاقان های غلتک مخروطی
– یاتاقان های کف گرد
– گزینش یاتاقان ها از روی کاتالوگ تولید کننده
یاتاقان های لغزشی
سطوح تماس در این یاتاقان ها توسط قشری از سیال یا ماده چرب کننده از یکدیگر جدا می شوند
یاتاقان های غلتشی
پروژه متلب آماده :بلبرینگ : معمول ترین نوع یاتاقان های غلتشی که دارای غلتک های کروی هستند .
رولر برینگ : دارای غلتک های استوانه ای هستند و به علت سطح تماس بیشتر نسبت به بلبرینگ های با همان اندازه بار محوری بیشتری تحمل می کنند .
تیپر برینگ : دارای غلتک های مخروطی هستند .
کف گرد : در جایی به کار می روند که بارهای سنگین محوری و ناهمراستایی داشته باشیم .
اتصالات
پیچ ومهره
پرچ
لحیم
جوش
چسب
خار و پین
پیچ و مهره
پرچ
خار
خارهای تخت به عنوان واسطه جهت انتقال گشتاور پیچشی بین میل محور و قطعه ای که روی آن سوار می شود به کار می روند.
خارهای حلقوی برای تثبیت قطعات روی میل محور به کار می روند.
مکانیزم ها
مکانیزم چهار میله ای
این مکانیزم کاربردهای فراوانی دارد و با بررسی آن می توان خواص تعداد زیادی از مکانیزم ها را که معادل این مکانیزم هستند مورد بررسی قرار داد.
مکانیزم چرخ و شانه
تبدیل حرکت دورانی چرخدنده به حرکت مستقیم الخط شانه
اگر α حرکت زاویه ای چرخدنده و s حرکت مستقیم الخط شانه و d قطر دایره گام چرخدنده باشد:
S = ( α / ۲ π ) * π d = α d / 2
مکانیزم لنگ و لغزنده
بارزترین نمونه استفاده از این مکانیزم، موتورهای احتراق داخلی هستند
مکانیزم اسکات راسل
مکانیزم بازگشت سریع
در این مکانیزم حرکت چرخشی به یک حرکت رفت و برگشتی متناوب تبدیل می شود . در این حرکت متناوب زمان رفت از زمان بازگشت بیشتر است و حرکت بازگشتی به سرعت صورت می گیرد .
مکانیزم های بادامکی
با یک مکانیزم بادامکی میتوان حرکت چرخشی بادامک را تقریبا به هر نوع حرکت خطی در پیرو تبدیل کرد
پیچ و مهره
این مکانیزم هم یکی دیگر از مکانیزم های تبدیل حرکت چرخشی به حرکت مستقیم الخط است.
چرخ ضامن دار
چرخ ضامن دارمتشکل است از :
۱- چرخ
۲- گیره
مهمترین ویژگی چرخ ضامن دار این است که گیره فقط اجازه حرکت در یک جهت را به چرخ میدهد
چرخ ژنوا
با استفاده از این مکانیزم می توان یک حرکت چرخشی پیوسته را به حرکت چرخشی منقطع تبدیل کرد.
چرخ دنده و گیربکس
صاف
مارپیچ
مخروطی
حلزونی
گیربکس
گیربکس سیاره ای
انتخاب الکتروموتور مناسب
چرخ دنده ساده
دایره گام (Pitch Circle)
گام دایره ای (p)
P = π d / N
مدول (m)
m = d (mm) / N
نسبت انتقال سرعت
( WA / WB ) = ( NA / NB )
چرخ دنده های مارپیچ و مخروطی
درگیری تدریجی دنده ها و حرکت نرم
حلزون و چرخ حلزون
محورهای انتقال قدرت متنافرا برهم عمود هستند.
امکان انتقال قدرت با نسبتهای بزرگ میسر است.
حرکت به طور یکطرفه از حلزون به چرخ حلزون منتقل می شود.
نسبت انتقال سرعت حلزون به چرخ حلزون
( WG / WW ) = ( NW / NG )
حلزون معمولا یکراهه است.
گیربکس
گیربکس سیاره ای
در این گیربکس ها محور یک یا بیش از یک چرخد نده نسبت به تکیه گاه حرکت می کند .
معمولا ورودی به چرخد نده خورشیدی داده می شود ، خروجی از بازو گرفته می شود و چرخ دنده حلقه ای ثابت است .
محور چرخ دنده خورشیدی ثابت و محور چرخ دنده های سیاره ای متحرک است .
گیربکس سیاره ای
با سری کردن چند دستگاه چرخ دنده سیاره ای میتوان به گیربکسی با نسبت تبدیل بالا و اندازه مناسب دست یافت.
انتخاب الکتروموتور مناسب
سرعت، توان و گشتاور خروجی
گشتاور معیاری است جهت سنجش قدرت گردشی موتور
T = Fd sin a
با استفاده از گیربکس گشتاور الکتروموتور را افزایش و سرعت زاویه ای آن را کاهش می دهیم .
توان
P = Tω
پولی و تسمه
زنجیر و چرخ زنجیر
کامپیوتر – MATLAB
پروژه matlab, پروژه برنامه ریزی مسیر ربات, پروژه برنامه ریزی مسیر ربات ژنتیک, پروژه ربات matlab, پروژه رباتیک matlab, پروژه متلب, پروژه مسیریابی ربات, پروژه مسیریابی ربات matlab, پروژه مسیریابی ربات الگوریتم ژنتیک, پروژه مکاترونیک matlab
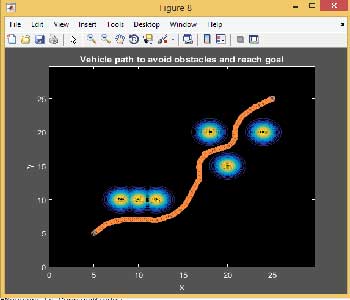
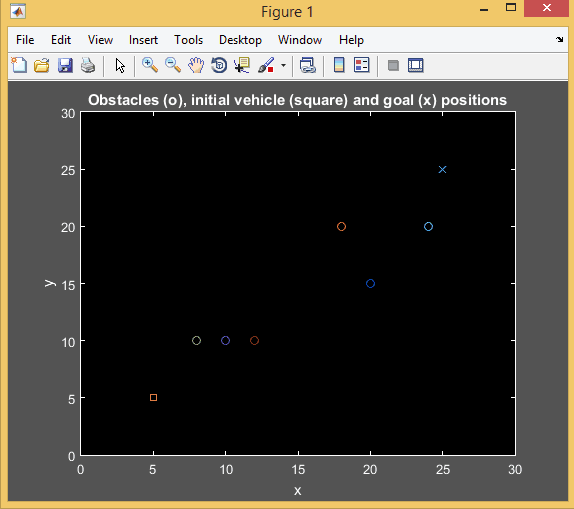
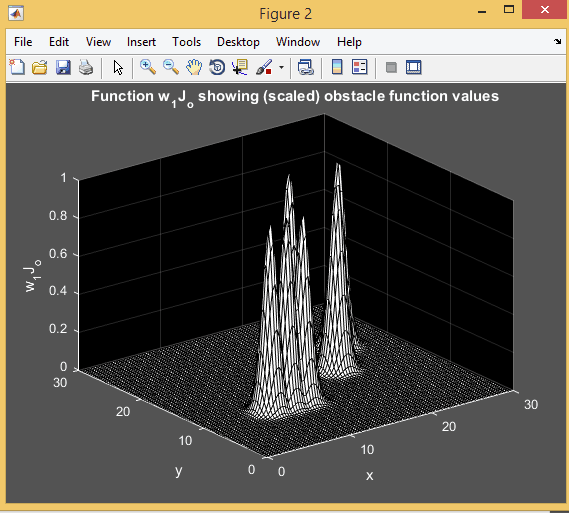
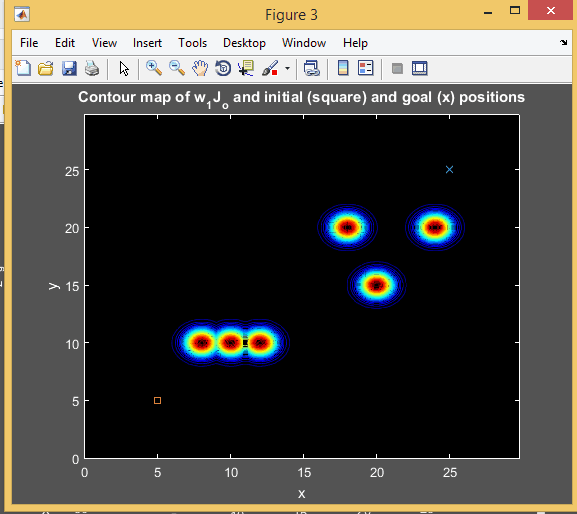
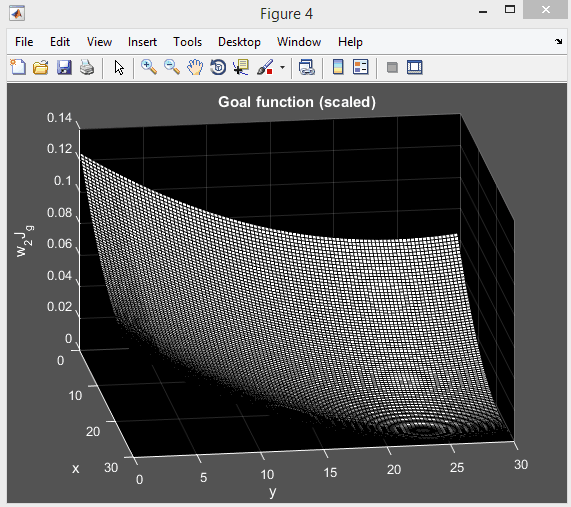
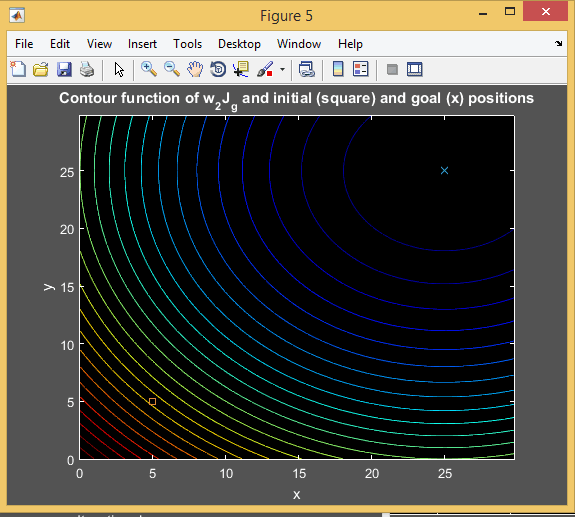
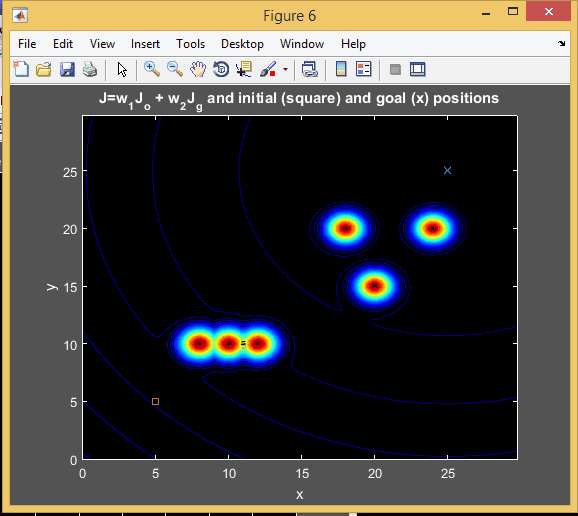
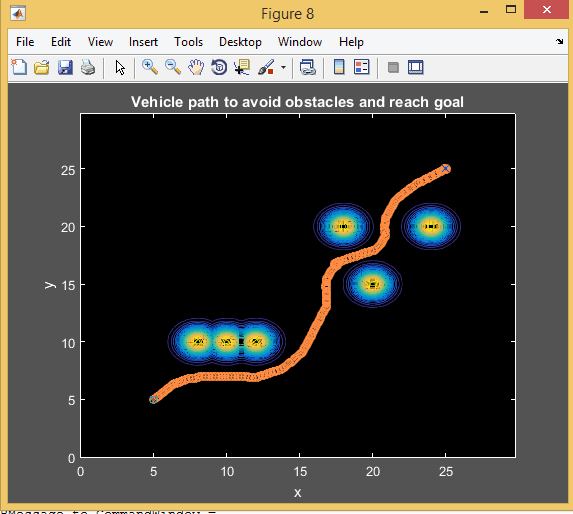
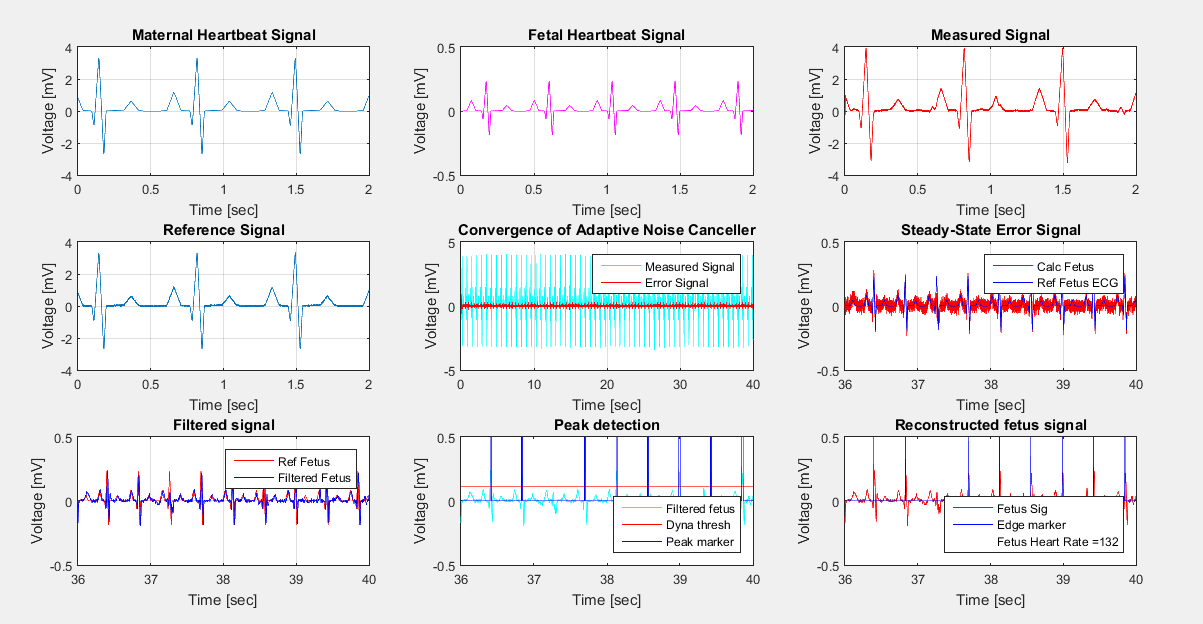
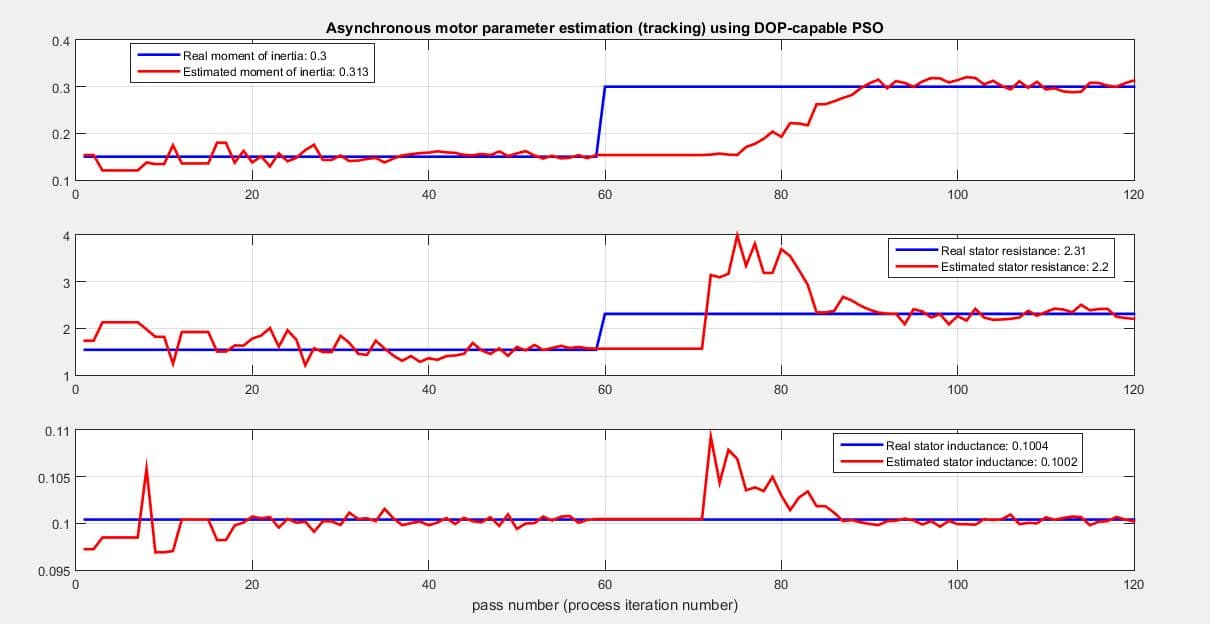
خروجی متلب :

لطفاً براي ارسال دیدگاه، ابتدا وارد حساب كاربري خود بشويد