کنترل کننده تکراری مبتنی بر ذره به کمک جبرانگر spline بر روی موتور PMSM
کنترل کننده تکراری مبتنی بر ذره به کمک جبرانگر spline بر روی موتور PMSM : پروژه متلب رایگان
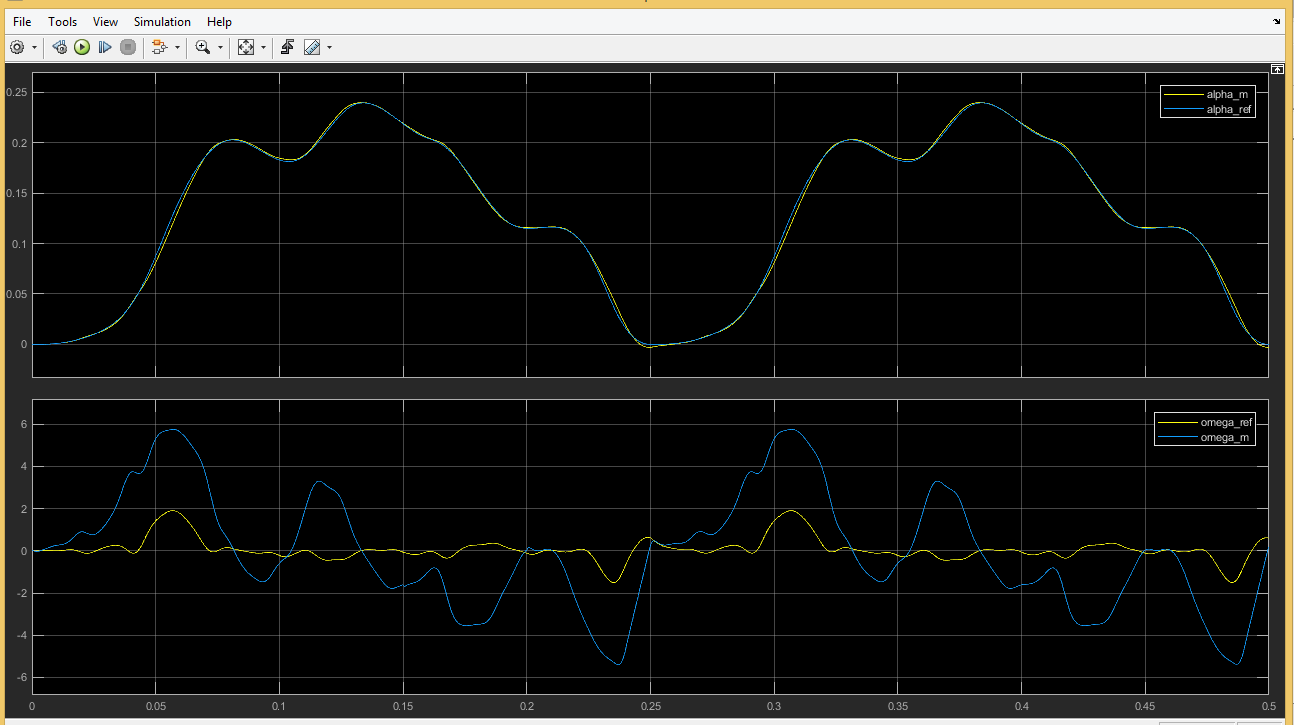
پروژه متلب رایگان: روش PSO یا به لاتین (Particle swarm optimization) یک روش سراسری کمینهسازی است که با استفاده از آن میتوان با مسائلی که جواب آنها یک نقطه یا سطح در فضای n بعدی میباشد، برخورد نمود. در اینچنین فضایی، فرضیاتی مطرح میشود و یک سرعت ابتدایی به آنها اختصاص داده میشود، همچنین کانالهای ارتباطی بین ذرات درنظر گرفته میشود. سپس این ذرات در فضای پاسخ حرکت میکنند، و نتایج حاصله بر مبنای یک «ملاک شایستگی» پس از هر بازهٔ زمانی محاسبه میشود. با گذشت زمان، ذرات به سمت ذراتی که دارای ملاک شایستگی بالاتری هستند و در گروه ارتباطی یکسانی قرار دارند، شتاب میگیرند. علیرغم اینکه هر روش در محدودهای از مسائل به خوبی کار میکند، این روش در حل مسائل بهینهسازی پیوسته موفقیت بسیاری از خود نشان داده است.
بین جاروبکها و ک موتاتور و جرقه های ناشی از آن محدود می باشد . این امر باعث شده تا به نگهداری و بازرسی مداوم ، از قبیل تمیز کردن یا عوض کردن جاروبکها نیازمند باشند. علاوه بر این موتورهای DC با مسائلی همانند ، عدم توانایی تحمل اضافه بار و غیر مقاوم بودن ، گشتاور پایین و محدوده کم تغییرات سرعت روبرو هستند. به همین دلیل موتور های AC با وجود اینکه دارای کنترل کننده های پیچیده و گرانقیمت تر نسبت به موتور های DC هستند، مورد توجه روز افزون قرار گرفته اند. موتورهای مغناطیس دائم در سالهای اخیر و بخصوص در دهه اخیر به دلیل خصوصیات ذاتی نظیر چگالی, توان بالا , لختی کم , ضریب توان و بازده بالا نسبت به موتورهای DC و موتورهای القایی در بسیاری از کاربردهای صنعتی سرعت متغییر در گستره توان کم و متوسط به خصوص در کاربردهای با رفتار برتر ترجیح داده شده اند. در این فصل سعی شده تا قبل از ارائه و بکارگیری روش کنترل به بررسی عملکرد این نوع موتورها ، انواع متداول و بطور کلی معرفی موتورهای سنکرون مغناطیس دائم پرداخته شود.
نحوه حرکت موتورهای الکتریکی
پروژه متلب رایگانحالا بیا یید ببینیم چه اتفاق می افتد که موتور پله ای حرکت می کند.
کلید فهمیدن اینکه موتورهای الکتریکی چگونه کار می کنند فهمیدن نحوه عملکرد آهن ربای الکتریکی است آهن ربای الکتریکی مبنای کار موتورهای الکتریکی است.
اگر سیمی حدود ۱۰ سانتی متر بردارید و به دور میخی بپیچید و دو سر آنرا به دو سر یک باطری وصل کنید زمانیکه جریان از سیم عبور می کند یک میدان مغناطیسی در اطراف سیم ایجاد می شود و آن میخ تبدیل به آهنربا می شود این میدان تا زمانییکه جریان از سیم عبور میکند وجود دارد یعنی تا زمانییکه دو سر سیم به باطری متصل باشد و زمانییکه این اتصال قطع شود این میدان نیز از بین می رود آن سر میخ که به قطب مثبت باطری وصل شده S وسر دیگر را که به قطب منفی باطری وصل شده N می نامییم حال اگر یک آهن ربای نعلی شکل بردارید و این میخ را به صورت معلق در وسط این آهن ربا قرار دهید به طورییکه میخ کاملا افقی قرار گیرد در صورتیکه قطب N میخ در مقابل قطب N آهن ربا ی نعلی شکل قرار بگیرد
وقطب دیگر میخ نیز به همین صورت در این وضعییت میخ ۱۸۰ درجه خواهد چرخد تا قطب N میخ در مقابل قطب S آهنربا و قطب S میخ در مقابل قطب N آهن ربا قراربگیرد همانطور که میدانید دو قطب متضاد همدیگر را جذب ودو قطب همسان همدیگر را دفع می کنند که حرکت میخ نیز در آهن ربای نعلی شکل به همین صورت است
حرکت موتورهای الکتریکی نیز در واقع از همین قانون پیروی می کند ما هر بار که در یک موتور پله ای یک سیم پیچ را تحریک می کنیم در واقع قطبهای N , S را در داخل موتور ایجاد میکنیم و روتور نیز مثل آن میخ و با استفاده از قانون جذب ودفع قطبها به حرکت در مآید واین حرکت همان چیزی است که ما به صورت فیزیکی از موتور مشاهده می کنیم
موتورهای خطی
پروژه متلب رایگانیک موتور خطی اساساً یک موتور الکتریکی است که از حالت دوار در آمده تا بجای اینکه یک گشتاور (چرخش) گردشی تولید کند، یک نیروی خطی توسط ایجاد یک میدان الکترومغناطیسی سیار در طولش ، بوجود آورد. موتورهای خطی اغلب موتورهای القایی یا پلهای هستند. میتوانید یک موتور خطی را در یک قطار سریع السیر ماگلیو مشاهده کنید که در آن قطار روی زمین پرواز میکند.
یک موتور خطی در واقع یک موتور الکتریکی است که استاتورش غیر استوانه شده است تا به جای اینکه یک گشتاور چرخشی تولید کند، یک نیروی خطی در راستای طول استاتور ایجاد کند.
طرحهای بسیاری برای موتورهای خطی ارائه شده است که میتوان آنها را به دو دسته تقسیم کرد: موتورهای خطی شتاب بالا و شتاب پایین. موتورهای شتاب پایین برای قطارهای مگلیو و دیگر کاربردهای حمل و نقلی روی زمین مناسب هستند. موتورهای شتاب بالا معمولاً خیلی کوتاه هستند و برای شتاب دادن به جسمی تا سرعت بسیار زیاد و سپس رها کردن آن به کار میروند. این موتورها معمولاً برای مطالعات برخورد سرعت بالا به عنوان تسلیحات نظامی یا به عنوان راهاندازنده جرمی برای پیشرانه فضاپیما به کار میرود.
موتور خطیای که برای شتاب دادن به یون ها یا ذرههای زیر اتمی به کار میرود، یک شتاب دهنده ذره نامیده میشود. با نزدیک شدن ذرهها به سرعت نور، طراحی موتورها معمولاً متفاوت میشود و این ذرهها نیز عموماً داری بار الکتریکی هستند.
شتاب پایین
پروژه متلب رایگان : تصویر ترن هوایی در JKF. به نوار القایی آلومینیومی بین ریلها توجه کنید.
ایده موتور خطی اولین بار توسط پرفسور اریک لیتویت از کالج امپریال در لندن مطرح شد. در طرح وی و در اکثر طرحهای شتاب پایین، نیرو توسط یک میدان مغناطیسی خطی سیار که بر روی هادیها موجود در میدان عمل میکند، ایجاد خواهد شد. در هر هادی چه یک حلقه، چه یک سیمپیچ یا یک تکه از فلز تخت که در این میدان قرار گیرد جریانهای گردابی القا شده وجود خواهد داشت و بنابراین یک میدان مغناطیسی مخالف را ایجاد خواهد کرد. دو میدان مغناطیسی همدیگر را دفع خواهند کرد و بنابراین جسم هادی را از استاتور دور خواهند کرد و آن را در طول جهت میدان مغناطیسی سیار حمل خواهند کرد.
به علت این ویژگیها، موتور خطی اغلب در پیشرانه قطار مگلیو به کار میرود هر چند که میتوان صرف نظر از پرواز مغناطیسی از آنها استفاده کرد، مانند استفاده در فنآوری انتقال پیشرفته و سریع نور که در سیستم ترن آسمانی ونکوور ، Scarborough RT تورنتو، ترن هوایی فرودگاه JGK نیویورک و Putra RTL کووالالامپور به کار میرود. از این فنآوری با تغییراتی در برخی از قطارهای بازی نیز استفاده میشود.
موتورهای خطی عمودی نیز برای مکانیسمهای بالابر در معدن های عمیق پیشنهاد شده است.
شتاب بالا
موتورهای خطی شتاب بالا برای کاربرهای متعددی پیشنهاد شدهاند. به علت اینکه مهمات ضد زرهی کنونی بایستی گلولههای کوچکی با انرژی جنبشی بسیار بالا باشند یعنی دقیقاً آنچه که این موتورها فراهم میکنند، از آنها به عنوان تسلیحات استفاده شده است. این موتورها همچنین برای استفاده در پیشرانه فضا پیماها به کار گرفته میشود. در چنین شرایطی به این موتورها راهاندازهای جرمی گفته میشود. سادهترین روش استفاده از راهانداز جرمی برای پیشرانه فضا پیما، ساخت یک راهانداز جرمی بزرگ است که بتواند محموله را تا سرعت گریز شتاب دهد.
پروژه متلب رایگان: طراحی موتورهای شتاب بالا به دلایل متعددی مشکل است. آنها مقادیر بزرگ انرژی را در مدت زمان کوتاه نیاز دارند. که برای هر پرتاب در فضا نیاز به ۳۰۰GJ در مدت زمان کمتر از یک ثانیه دارد. ژنراتورهای الکتریکی معمولی برای چنین نوع از باری طراحی نشدهاند اما روشهای ذخیره انرژی الکتریکی کوتاه مدت را میتوان مورد استفاده قرار داد. خازن ها پر حجم و گران هستند اما میتوانند به سرعت مقادیر بزرگ انرژی را فراهم کنند.
ژنراتورهای هم قطب را میتوان برای تبدیل سریع انرژی جنبشی یک چرخ طیار به انرژی الکتریکی به کار برد. موتورهای خطی شتاب بالا نیازمند میدانهای مغناطیسی بسیار قویای نیز هستند، در واقع میدانهای مغناطیسی اغلب آنقدر قوی اند که اجازه استفاده از ابر رساناها را نمیدهند. اما با طراحی دقیق میتوان این مشکل را حل کرد.
دو طرح متفاوت پایهای از موتورهای خطی شتاب بالا ابداع شده است: تفنگهای ریلی و تفنگ های کویلی
انواع ژنراتورهای DC :
۱-مولد DC با تحریک جداگانه :
سیم پیچ میدان این ژنراتور به وسیله یک منبع ولتاژ مستقل تحریک میشود.
این ژنراتور هنگامیکه یک حوزه وسیعی از تغییرات ولتاژ خروجی مورد نیاز باشد استفاده میشود.
کاربرد : بدلیل قابلیت تنظیم ولتاژ در محدوده وسیع در تنظیم دور موتورها وتحریک مولدهای بزرگ در نیروگاهها مورد استفاده قرار میگیرد.
۲-مولد شنت :
سیم پیچ میدان با سیم پیچ آرمیچر موازی بسته میشودو به همین دلیل به آن سیم پیچ شنت یا موازی میگویند. تعداد حلقه های سیم پیچ شنت بسیار زیاد است و جریان این سیم پیچ کم حدود ۵ درصد جریان اسمی آرمیچر میباشد. ( جریان باید کم باشد تا در جریان اصلی اثر کمی بگذارد.)
کاربرد: از این مولد در شارژ باطری ها و تامین برق روشنایی اضطراری و تغذیه سیم پیچ مولد های نیروگاهی استفاده می شود.
۳- مولد سری: که سیم پیچ میدان (سیم پیچ سری تحریک) با سیم پیچ آرمیچر سری بسته می شود. سیم پیچ سری دارای تعداد حلقه های کمتر بوده ولی جریان عبوری آن نسبتاُ زیاد است.(زیرا جریان آن همان جریان اصلی است) تا معادل mmf سیم پیچ شنت تولید شود.
کاربرد مولد سری :
بدلیل داشتن گشتاور راه اندازی زیاد در وسایل حمل و نقل مانند مترو و جرثتقیلهای برقی استفاده میشود.
۴-مولد کمپوند :
اگر از هر دو سیم پیچ شنت وسری جهت تحدیک مولد استفاده شود، مولد DC یا کمپوند میگویند ، که دارای دو نوع کمپوند اضافی و نقصانی میباشند.
کمپوند اضافی :
اگر نیرو محرکه مغناطیسی سیم پیچ سری ، نیرو محرکه مغناطیسی سیم پیچ شنت را تحریک کند، مولد کمپوند اضافی گویند. که دارای دو نوع شنت بلند و شنت کوتاه میباشد
مولد کمپوند اضافی بسته به تعداد دورهای سیم پیچ سری میتواند یکی از سه حالت زیر باشد :
الف) فوق کمپوند : (تعداد دهر سیم پیچ سری زیاد است) در مواردی استفاده میشود که بایستی ولتاژ بار ثابت باشد. ولی به علت وجود فاصله بین مولد و مصرف کننده در سیمها افت ولتاژ به وجود می آید. در این حالت افزایش ولتاژ خروجی مولد، افت ولتاژ خط را جبران میکند و به مصرف کننده ولتاژ ثابت میرسد.
ب)تخت : نیروی محرکه مغناطیسی سیم پیچ سری و موازی با هم برابر بوده و جایی استفاده میشود که نیاز به ولتاژ ثابتی باشدو فاصله بین مولد و مصرف کننده کم باشد
ج)زیر کمپوند : اثر آمپر دور سیم پیچ سری ناچیز می باشد(ـبه علت تعداد دور کم سیم پیچ سری) و در تحریک مولد های نیروگاهی نقش موثری دراد
کمپوند نقصانی :
کمپوند نقصانی هنگامی که شار سیم پیچ سری باعث کاهش و نقصان اثر شار سیم پیچ شنت شود و در جوشکاری قوس الکتریکی استفاده می شود.
تذکر : کمپوند نقصانی و کمپوند اضافی دارای دو نوع شنت بلن و شنت کوتاه می باشند
که اگر سیم پیچ سری با سیم پیچ ارمیچر با هم سری بسته شوند شنت بلند گفته و اگر سیم پیچ شنت با سیم پیچ ارمیچر موازی قرار گیرد شنت کوتاه می گویند
…
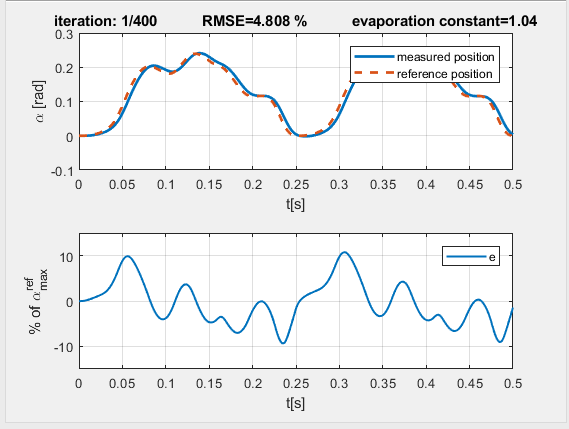
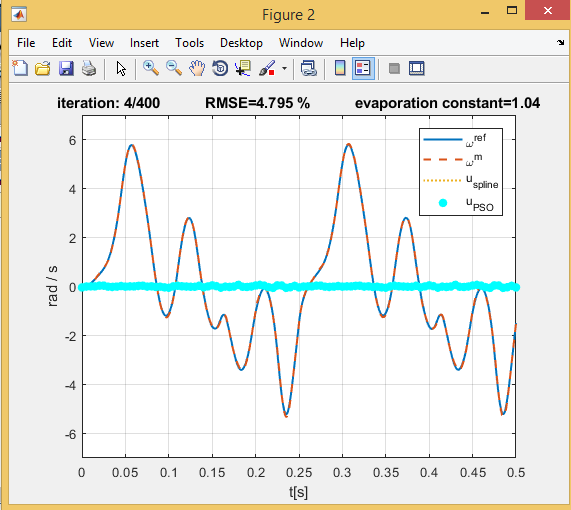
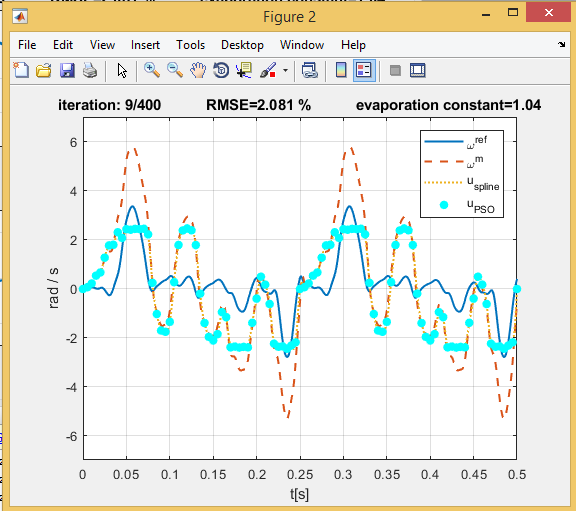
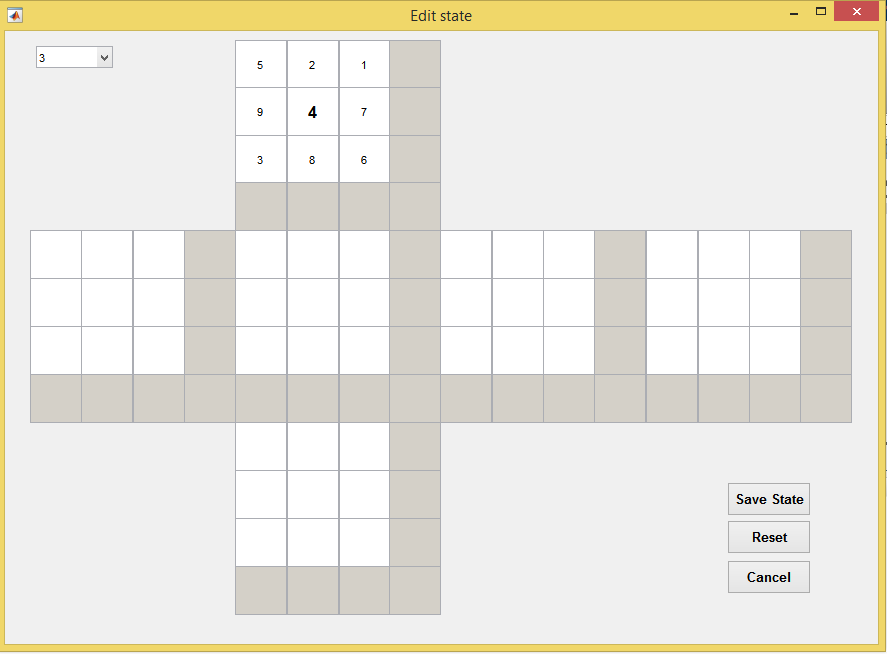
خروجی برنامه :
 ۳
۳
لطفاً براي ارسال دیدگاه، ابتدا وارد حساب كاربري خود بشويد