طراحی کنترلر pid تیون شده با استفاده از کنترلر فازی بر روی سیستم غیرخطی بهمراه گزارش فارسی:انجام پروژه متلب
طراحی کنترلر pid تیون شده با استفاده از کنترلر فازی بر روی سیستم غیرخطی بهمراه گزارش فارسی:پروژه شبیه سازی متلب
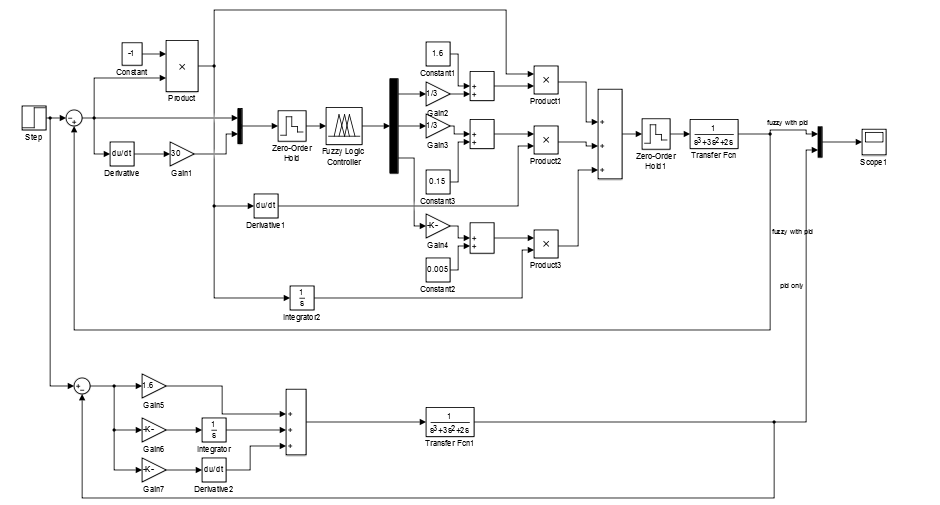
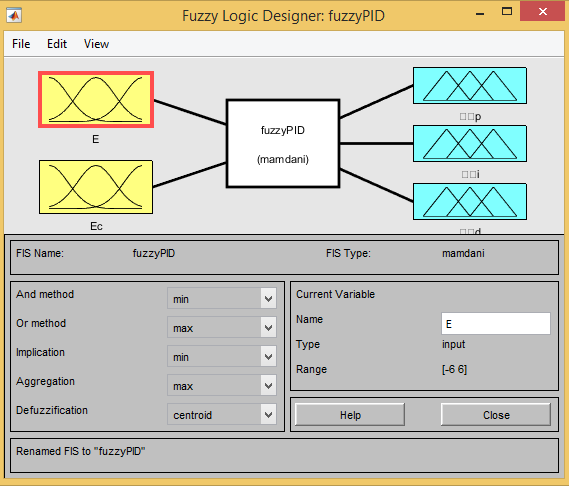
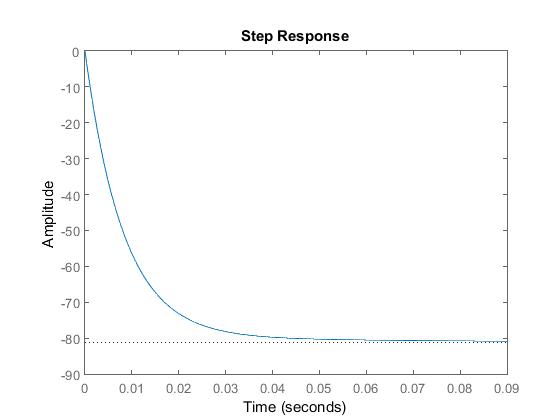
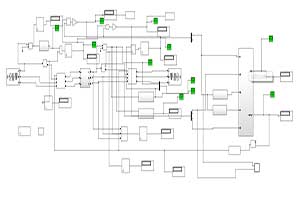
پروژه شبیه سازی متلب : برای انجام این پروژه باید ابتدا با طراحی کنترلر خطی pid باید ابتدا پارامتر های کنترلر را تیون کرده اما می بینیم که عملکرد مناسبی بر روی این سیستم وجود ندارد چرا که سیستم ذاتا غیرخطی و ناپایدار است پس باید از روش های غیرخطی استفاده کنیم و یا این که از تلفیقی از این کنترلر با روش فازی استفاده کنیم زیرا کنترلر خطی یک کنترلر مقاوم و نیز بر روی سیستم های غیر خطی عملکرد مناسب تری دارد لذا از تلفیق این دو روش استفاده خواهیم کرد به این صورت که از کنترلر فازی برای تنظیم دقیق ضرایب کنترلر pid استفاده خواهیم برد .
منطق فازی بهطور گسترده در سیستم (دستگاه) استفاده میشود بدین صورت که کنترل اصطلاح “فازی” به این واقعیت اشاره دارد که منطق درگیر میتواند با آن مقابله مفاهیمی که نمیتوانند بیان شوند را “درست” یا “نادرست”، بلکه “به طور جزئی” درست بیان کند”. اگر چه روشهای جایگزین مانند الگوریتم ژنتیک و عصبی شبکهها میتوانند همانند فازی را انجام دهند اما مزیت منطق فازی در بسیاری از موارد منطقی این است که میتواند در نظر گرفته شود اپراتور انسان را میتوانید درک کنید، به طوری که تجربه خود را میتوان در طراحی کنترل استفاده کرد. این باعث میشود تا وظایف مکانیکی آسانتر شود که قبلاً با موفقیت انسان انجام شدهاست.
تاریخچه و برنامههای کاربردی
پروژه شبیه سازی متلب :منطق فازی برای اولین بار توسط پروفسور لطفی زاده در دانشگاه کالیفرنیا در برکلی در سال ۱۹۶۵ پیشنهاد شد. وی در مقاله ای ایدههای خود را در سال ۱۹۷۳ با مفهوم “زبانشناسی متغیرها ” معرفی کرد که با یک متغیر به عنوان یک مجموعه فازی تعریف شدهاست.
این برنامه در ابتدا در ژاپن اجرا شد اما اولین کاربرد در صنعت به یک کوره سیمان ساخته شده در دانمارک در سال ۱۹۷۵ برمی گردد. علاقه به سیستمهای فازی توسط Seiji Yasunobu و Soji Miyamoto موجب شد که در سال ۱۹۸۵ در هیتاچی شبیهسازیهایی را ارائه دهند که امکانسنجی سیستمهای کنترل فازی را برای راه آهن sendai که در سال ۱۹۸۷ افتتاح شد ارائه دهد. ایده آنها از سیستمهای فازی برای کنترل سرعت، ترمز، توقف زمانی ارائه شدهاست.
- در سال ۱۹۸۷، تاکشی یاماکاوا استفاده از کنترل فازی را از طریق مجموعه ای از فازی اختصاصی ساده در تراشههای منطقی، در «آونگ معکوس» مشاهده کرد.
مشکل کنترل کلاسیک این است که در ان یک وسیله نقلیه تلاش میکند تا یک قطب که توسط یک لولا بالا با حرکت رو به جلو یا عقب نگه داشته شود. نصب یک شیشه حاوی اب و حتی یک موش زنده به بالای آونگ موجب ثبات نگهداری سیستم میشود. یاماکاوا به تلاش خود در آزمایشگاه تحقیقاتی فازی برای کمک به اختراعات خود را در این زمینه ادامه داد.
- مهندسان ژاپنی پس از ان طیف وسیعی از کنترل فازی را توسعه دادند. قرارداد آزمایشگاه سیستمهای صنعتی و کاربردی در ژاپن در سال ۱۹۸۸برای مهندسی فازی در سطح بینالمللی منعقد شد.
- در این توافق ۴۸ شرکت که تحقیقات آنها در زمینه فازی میبود. شرکت خودرو سازی فولکس واگن تنها عضو خارجی در این توافق بود که یک محقق به مدت سه سال برای این پروژه فرستاد.
اغلب کالاهای مصرفی ژاپنی از سیتم کنترل فازی پیروی میکنند؛ ماتسوشیتا در ساخت جاروبرقی از میکروکنترلرها استفاده میکند. بر این اساس الگوریتم فازی برای بررسی سنسورهای گرد و غبار و قدرت مکش را تنظیم میکند. ماشین لباسشویی هیتاچی بااستفا ده از کنترل کنندهای فازی برای بارگذاری وزن، پارچه مخلوط، حسگرهای خاک و بهطور خودکار چرخه شستشو برای استفاده بهینه از قدرت، اب و مواد شوینده مورد استفاده قرار میگیرد.
- (شرکت) کانن فوکوس خودکار در دوربین که از یک باتری استفاده میکند را توسعه داد. دستگاه (CCD)برای اندازهگیری وضوح تصویر در شش منطقه از زمینه تصویر خود را مشاهده کرده و استفاده از اطلاعات ارائه شده برای تعیین اینکه ایا تصویر در فوکوس است یا خیر و همچنین میزان تغییر لنز را ردیابی میکندهمچنین از حرکت در حین فوکوس (تمرکز) و کنترل سرعت ان جلوگیری میکند.
- سیستم کنترل فازی دوربین با استفاده از ۱۲ ورودی که ۶ ورودی برای بدست آوردن وضوح فعلی در اطلاعات ارائه شده توسطCCD و ۶ ورودی دیگر برای اندازهگیری میزان تغییر لنز مورد استفاده قرار میگیرد. خروجی سیستم موقعیت قرارگیری لنز میباشد. سیستم کنترل فازی از ۱۳ ورودی و خروجی (قانون) استفاده میکند و به ۱٫۱ کیلو بایت حافظه نیاز دارد.
- یک سیستم تهویه مطبوع صنعتی طراحی شده توسط شرکت میتسوبیشی از ۲۵ دستور گرما و ۲۵ دستور قوانین خنککننده استفاده میکند. یک سنسور دما ورودی خروجی تغذیه را به وسیله یک معکوسکننده (اینورتر)، یک شیر کمپرسور و یک موتور فن کنترل میکند.
در مقایسه با طراحی قبلی، کنترلکننده فازی گرما و سرما پنج برابر سریع تر است و ۲۴٪ قدرت مصرف را کاهش میدهد. افزایش دما توسط یک معیار دو فاکتوری است و از سنسورهای کمتری استفاده میکند.
- برنامههای دیگری که مورد بررسی قرار گرفتند یا پیادهسازی شدند عبارتند از :تشخیص دست خط و شخصیت، سیستمهای فازی نوری، روباتها، از جمله یکی از آنها ساخت گلهای ژاپنی؛ ربات هلیکوپترهای کنترل صدا (شناور یک عمل متعادلکننده است شبیه به مسئله آونگ معکوس)، رباتهایی که به بیماریهای خاص توانبخشی میدهد. (برای مثال برای کنترل ضربان قلب و فشار خون)، کنترل جریان پودر در ساخت فیلم، سیستمهای آسانسور و غیره.
کار بر روی سیستمهای فازی در ایالات متحده و اروپا نیز ادامه دارد اگرچه در مقیاس گستردهتری در ژاپن انجام میشود. آژانس حفاظت از محیط زیست در ایالات متحده آمریکا کنترل فازی را برای موتورهای کارامد مورد بررسی قرار دادهاست، ناسا کنترل فازی را برای فضای اتصال اتوماتیک مطالعه کردهاست: شبیهسازیها نشان میدهد یک سیستم کنترل فاز میتواند تا حد زیادی موجب کاهش مصرف سوخت شود. شرکتهایی مانند بویینگ، جنرال موتورز، الن برادلی، کرایسلر، ایاتون، وایرل پول برای یخچالهای کم مصرف (کم قدرت)، حمل و نقل خودرو، بهرهوری از انرژی موتورهای الکتریکی بر روی منطق فازی کار کردهاند
- در سال ۱۹۹۵ مایتاگ یک ماشین ظرفشویی هوشمند براساس کنترلکننده فازی معرفی کرد که یک سنجش یک مرحله ای ماژول که ترکیبی از ترمیستور، برای اندازهگیری دما، یک سنسور هدایت، برای اندازهگیری سطح پاککننده از یونهای موجود در شستشو، همچنین یک سنسور حساس که پراکندگی را اندازه میگیرد؛ نور برای اندازهگیری میزان خیس بودن شستشو و یک سنسور مغناطیسی برای خواندن نرخ چرخش.
چرخه شستشو بهینه برای هر چرخه سیستم بهترین نتیجه را در کمترین مقدار از انرژی، مواد شوینده و اب در سیستم تعیین میکند. این حتی برای غذاهای خشک شده به کمک ردیابی آخرین باری که در باز بود و تعداد ظرفها به همراه تعداد دفعات بازبودن درب تنظیم شدهاست. تحقیق و توسعه همچنان بر کاربردهای سیستم فازی در نرمافزار، در مقابل سیستم عامل، طراحی، شامل سیستم تخصصی فازی و ادغام منطق فازی با شبکه عصبی به اصطلاح سازگار با ژنتیک سیستمهای نرمافزاری، در هدف نهایی از ساخت آموزش خودکار (هوش مصنوعی) در سیستمهای کنترل فازی است. این سیستمها میتوانند مجموعهها، ماشینهای دینامیکی غیرخطی را کنترل کنند برای مثال بدن انسان.
مجموعههای فازی
متغیرهای ورودی در یک سیستم کنترل فازی به طورکلی توسط مجموعه ای از نقشههای تابع عضویت کنترل میشوند که به عنوان مجموعههای فازی شناخته میشوند فرایند تبدیل یک مقدار ارزش ورودی به یک موجدار به یک مقدار ارزش فازی، فازی سازی نامیده میشود. در یک سیستم کنترل، نوع سوئیچ یا on/off ورودیهای همراه با ورودیهای آنالوگ و همچنین سوئیچ در ورودیها همواره یک ارتباط (حقیقت) مجموعه فازی دارند که ارزش ان برابر۱ یا ۰ است ام این طرح میتواند با آنها به سادگی برخورد کند زمانی که توابع فازی یک مقدار با مقدار دیگری اتفاق میافتد. با توجه به نمایش متغیرهای ورودی به توابع عضویت و مقادیر حقیقی، میکروکنترلر براساس اقدامات، برمبنا دستورها تصمیم میگیرد.
IF brake temperature IS warm AND speed IS not very fast THEN brake pressure IS slightly decreased.
در این مثال دو متغیر دمای ترمز و سرعت ورودی هستند که به عنوان مجموعه فازی تعریف میشوند. خروجی متغیر نیز، فشار ترمز تعریف شدهاست که همچنین مجموعه فازی تعریف میشود که میتواند مقداری چون استاتیک یا افزایش تدریجی یا کاهش تدریجی و غیره تعریف شود. این دستور به تنهایی بسیار گیجکننده است زمانی که به نظر میرسد میتوان بدون مزاحم از منطق فازی استفاده کرد اما به یاد داشته باشید این تصمیم بر مبنای دستورهای مجموعه است.
- تمام قوانینی که اعمال میشوند فراخوانی میشوند تا با استفاده از توابع عضویت و مقادیر حقیقی از ورودیها برای حدود نتیجه دستورها بدست اید.
- این نتیجه به نوبه خود به یک نقشه تبدیل میشود برای کنترل متغیر خروجی تابع عضویت و مقدار حقیقی.
- نتایج بدست آمده از پاسخ واضح خاص ترکیب شدهاست، فشار ترمز واقعی روش شناخته شدهای است که تخریب پذیری نامیده میشود.
پروژه شبیه سازی متلب :ترکیب عملیات فازی و نتیجهگیری برمبتنی بر قاعده فازی سیستم تخصصی را توصیف میکند. سیستمهای کنترل کلاسیک مبتنی بر مدلهای ریاضی است که کنترل میکند یک یا چند سیستم با استفاده از یک یا چند معادله دیفرانسیل که به وسیله ورودیهای سیستم تعریف میشود. چنین سیستمهای اغلب به عنوان سیستمهای PID که کنترل کنندهها متناسب با انتگرال گیر کنترلکننده هستند اجرا میشوند. آنها در توسعه و تجزیه و تحلیل سیستمهای بسیار مؤثر هستند.
اگر PID و دیگر سیستمهای کنترل کلاسیک بسیار توسعه یافتهاند چرا با کنترل فازی در تضادند؟ این چند مزیت دارد. در بسیاری از موارد، مدل ریاضی کنترل فرایند ممکن است وجود نداشته باشد یا ممکن است خیلی گران از نظر پردازش قدرت رایانه و حافظه باشد و یک سیستم ممکن است براساس قوانین تجربی مؤثرتر باشد.
علاوه بر این، منطق فازی برای پیادهسازی کم هزینه بر روی سنسورها، تبدیل آنالوگ به دیجیتال ویک تراشه ۴بیتی یا ۸ بیتی در میکروکنترلرها میتواند مناسب باشد. چنین سیستمی را میتوان به راحتی ارتقا داد تنها با اضافه کردن دستور جدید برای بهبود اجرا یا اضافه کردن یک ویژگی جدید. در بسیاری از موارد از کنترل فازی میتوان در بهبود کنترل کنندههای کلاسیک یا اضافه کردن یک لایه اضافی از روش هوشمند به روش کنترل کنونی استفاده کرد.
جزئیات کنترل فازی
کنترل کنندههای فازی از لحاظ مفهومی بسیار ساده هستند. آنها از یک مرحله ورودی، یک مرحله پردازش و یک مرحله خروجی تشکیل شدهاند. در مرحله ورودی طراحی سنسور (جایابی سنسورها در سیستم) یا ورودیهای دیگر مانند سوئیچها، انگشت شست و غیره مطرح است، تابع تبدیل و مقادیر حقیقی بایستی مناسب باشد. در مرحله پردازش هر دستور در جای مناسب خود یک نتیجه میدهد، سپس نتایج را ترکیب میکند تا دستور نهایی را بدست آورد. در مرحله خروجی نتیجه ترکیبی را به یک مقدار کنترل خروجی ویژه برمیگرداند.
شایعترین شکل تابع عضویت، توابع مثلثی استهرچند منحنیهای تراپزی و زنگ نیز استفاده میشوند، اما شکل تغییر سطح و جایابیها به طورکلی اهمیت کمتری دارد. از سه تا هفت منحنی برای پوشش موردنیاز محدوده ورودی مناسب است یا جهان گفتمان در اصطلاحات فازی.
همانطور که قبلاً مورد بحث قرار گرفت، مرحله پردازش براساس مجموعه ای از قوانین منطق در فرم حالت IF-THEN شکل گرفتهاست. جایی که بخش IF به عنوان پیشخور (پیشین) و بخش THEN به عنوان پسخور(نتیجه) نامیده میشوند. سیستمهای کنترل فازی معمولاً دهها دستور دارند. یک قانون برای یک ترموستات را در نظر بگیرید:
IF (temperature is "cold") THEN (heater is "high")
پروژه شبیه سازی متلب :این دستور از مقدار حقیقی دمای ورودی استفاده میکند زمانی که برخی از مقادیر حقیقی در سرما، نتیجه را در مجموعه فازی خروجی گرم برای برخی از مقادیر بالا تولید میکند، این نتیجه با نتایج دیگر در قوانین نهایی برای خروجی کامپوزیت ترد استفاده میشود بدیهی است بیشترین مقدار حقیقی از سرما، بالاترین مقدار حقیقی از گرما است هرچند لزوماً به این معنا نیست که خروجی خود را به بالا تنظیم میکند از آنجا که این تنها یک قاعده در میان بسیاری است. در برخی موارد تابع عضویت میتواند با تغییر دادن به قاعده هود به مقداری معین مساوی شود. معمولاً هود شامل درباره، نزدیک تقریباً، بیش از حد، تا حدودی، بسیار، همچنین، بشدت، است. این عملیات ممکن است تعاریف دقیقی داشته باشند، هرچند تعاریف میتوانند بهطور قابل توجهی متفاوت باشند برای یک مثال توابع عضویت مربعی از آن جا که مقادیر عضویت همیشه کمتر از یک است تابع عضویت محدود برای بدست آوردن مقادیر در محدوده بزرگتر بشدت میشود در حالی که تاحدودی ریشه تابع را با مربع گسترش میدهد.
در عمل، در مجموعه قوانین فازی چند پیش فرض ترکیب شده وجود دارد که از عملکرد فازی استفاده میکند مانند AND وOR وNOT هرچند تعاریف برای تغییر دوباره تمایل دارندو در یک تعریف عمومی از همه حداقل وزن استفاده میکنند زمانی کهOR از بیشترین مقدار استفاده میکند. همچنین یک تابع تبدیل از ۱ برای عملگر NOT وجود دارد تا تابع مکمل بدهد.
چند راه برای تعریف نتیجه دستور وجود دارد اما یکی از رایجترین و سادهترین استنتاج روش MAX/MIN است در این روش تابع خروجی مقادیر حقیقی تولید شده را به وسیله فرض قبلی به ما میدهد.
پروژه شبیه سازی متلب :دستورها میتوانند به صورت موازی در سختافزار یا به صورت پیوسته در نرمافزار حل شوند نتایج حاصل از همه دستورها تأکید بر روش دی فازی برای رسیدن به مقادیر یکنواخت از چندین روش دارد. چندین روش وجود دارد، در تئوری، هرکدام با مزایا و اشکالات مختلفی است. روش Centroid بسیار محبوب است، مرکز جرم نتیجه مقادیر موجی است. رویکرد دیگر روش قد است که ارزش بزرگترین مشارکتکننده طول میکشد. روش centroid دستورهای بزرگترین منطقه از خروجی در حالی که ارتفاع روش بهطور پیوسته به بزرگترین مقدار خروجی حکم میکند.
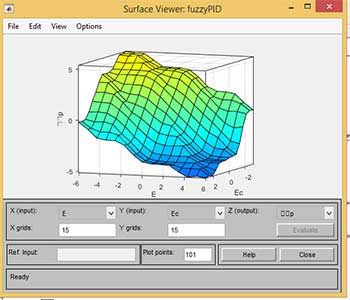
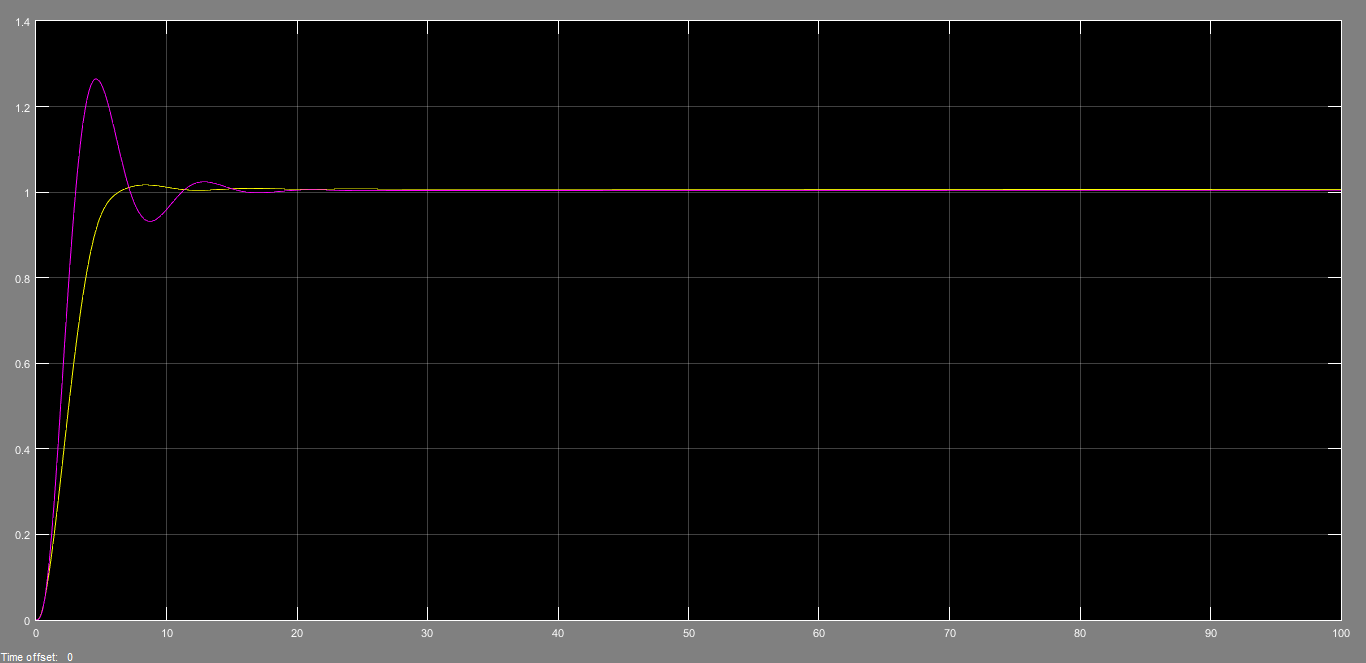
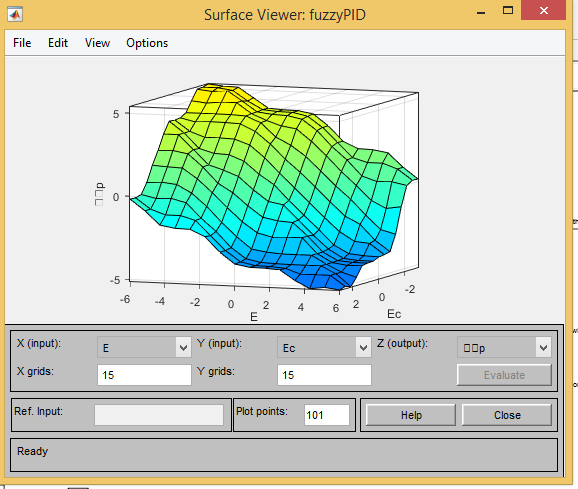
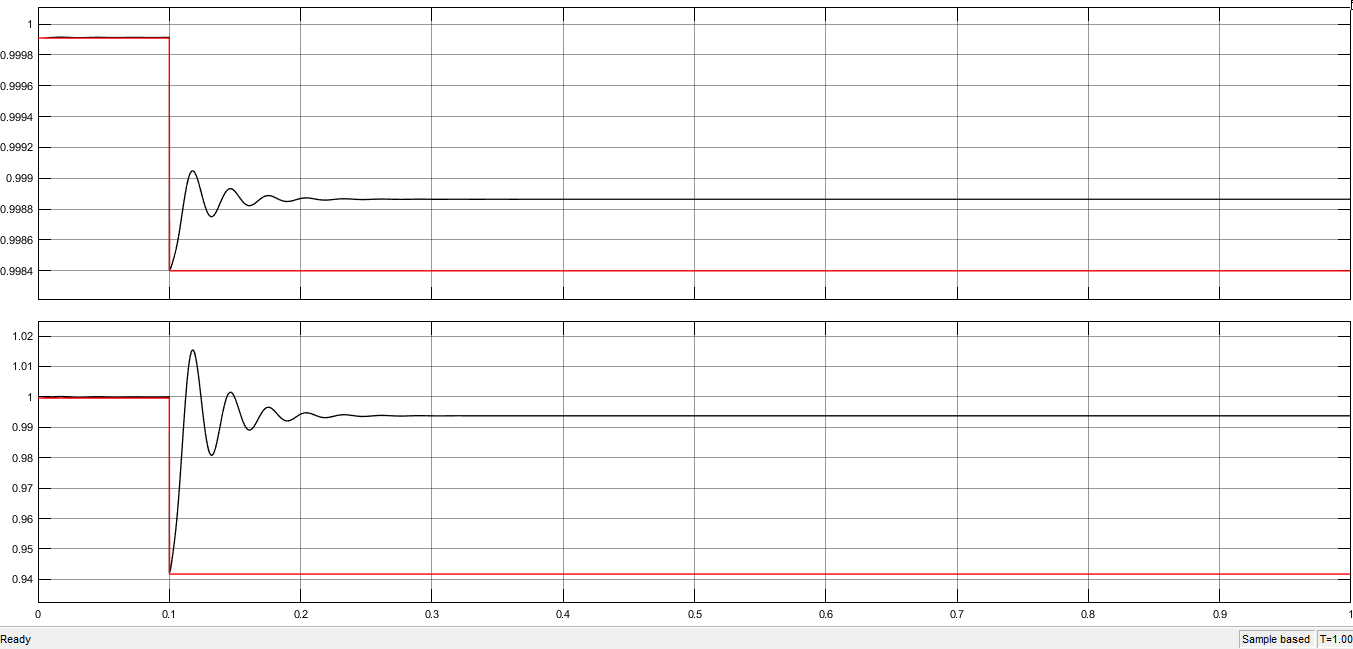
خروجی متلب :
 ا
ا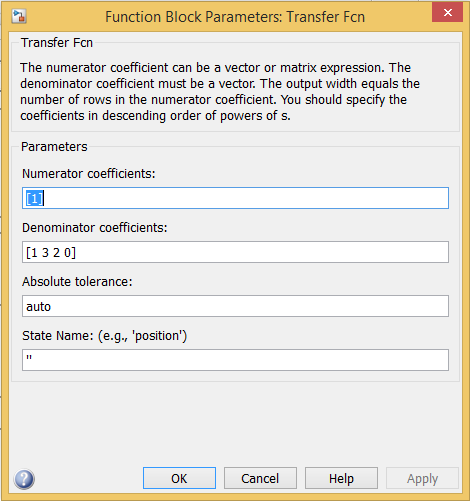

لطفاً براي ارسال دیدگاه، ابتدا وارد حساب كاربري خود بشويد