طراحی کنترل کننده مقاوم robust control بر روی مدل جرم و فنر همراه مقاله (کنترل مقاوم)
طراحی کنترل کننده مقاوم robust control بر روی مدل mass and damper همراه مقاله شبیه سازی شده (کنترل مقاوم):پروژه متلب ارزان
پروژه متلب ارزان : کنترل مقاوم یا Robust Control یکی از استراتژی های طراحی سیستم های کنترل است، که در آن بر روی ثبات و مقاومت عملکرد سیستم کنترلی در مقابل تغییرات و نایقینی ها، تاکید می شود و هدف از طراحی، ایجاد یک سیستم کنترلی است که تغییرات در شرایط سیستم، کمترین اثر را در خروجی داشته باشد. به عبارت دیگر، افزایش قابلیت اطمینان سیستم، مهم ترین هدفی است که در طراحی کنترل مقاوم مد نظر قرار می گیرد. به ویژه، تامین عملکرد مناسب و یا پایداری در حضور عوامل نایقین، دینامیک های مدل نشده و یا عوامل مزاحم مانند اغتشاش و ورودی های ناخواسته، از جمله اصلی ترین اهداف در طراحی سیستم های کنترل مقاوم است.
پروژه متلب ارزان : رویکردهای مختلفی برای طراحی کنترل کننده مقاوم وجود دارد، که از جمله آن ها، می توان به رویکردهای نُرم بی نهایت (H∞)، نُرم دو (H2)، ترکیب نُرم های دو و بی نهایت (Mix H∞/H2)، و سنتز میو (μ-Sythesis) اشاره نمود. البته، مفهوم مقاومت یا Robustness، یک مفهوم مطلق نیست و هر ساختار کنترل کننده ای، تا حدودی مقاوم است و از این رو، بسیاری از روش های کنترل شناخته شده، مانند کنترل کننده PID و یا کنترل مد لغزشی یا Sliding Mode Control (به اختصار SMC)، تا حدودی مفهوم مقاوم بودن را در خود دارند.
پروژه متلب ارزان : در این مجموعه آموزشی، موضوع طراحی کنترل مقاوم مبتنی بر فیدبک خروجی، در قالب ساختار عمومی کنترل (یا General Control Configuration) و برای سیستم های خطی مورد بحث واقع شده است. طراحی چنین کنترل کننده ای، با توجه به تئوری های تشریح شده در این مجموعه آموزشی، به صورت یک مسأله بهینه سازی دینامیکی بیان شده است و موضوع طراحی کنترل کننده مقاوم و تعیین پارامترهای آن، با در نظر گرفتن معیارهای نُرم بی نهایت (H∞)، نُرم دو (H2) و ترکیب وزن دار نُرم های دو و بی نهایت (Weighted Mixture of H∞/H2)، به الگوریتم های بهینه سازی تکاملی و هوشمند سپرده شده است.
مدرس این مجموعه آموزش، دکتر سید مصطفی کلامی هریس (دکترای مهندسی کنترل از دانشگاه صنعتی خواجه نصیرالدین طوسی) است. همانند سایر آموزش های فرادارس، در مجموعه آموزشی طراحی کنترل مقاوم H∞/H2 با استفاده از الگوریتم های تکاملی و فراابتکاری نیز، پس از تشریح کامل و دقیق مبانی تئوری و نظری موضوع مورد بحث، پیاده سازی گام به گام و کاملا عملی الگوریتم و رویکرد مورد بحث در محیط متلب، در دستور کار قرار گرفته است.
پروژه متلب ارزان : مثال عملی مورد استفاده در این مجموعه آموزشی، طراحی یک سیستم تعلیق فعال خودرو یا Active Car Suspension System است، که موضوع این طراحی، به صورت یک مسأله کنترل مقاوم بیان و با استفاده از الگوریتم ژنتیک و بهینه سازی ازدحام ذرات (PSO) حل شده است. سیستم تعلیق خودرو، یکی از بخش های مهم خودروهای امروزی است که در طراحی آن، غالبا سه هدف اصلی مد نظر است، که این اهداف با بررسی مدل ریاضی سیستم، می توانند به صورت اهداف یک مسأله کنترل مقاوم در نظر گرفته شوند و توسط یک کنترل کننده مقاوم، تامین شوند. اهداف اصلی از طراحی یک سیستم تعلیق کارآمد، در ادامه آمده است:
– تامین امنیت جانی مسافران با کاهش جابجایی نسبی شاسی نسبت به سطح جاده و نزدیک تر نگه داشتن مرکز ثقل خودرو به سطح زمین
– تامین راحتی سرنشینان خودرو با کاهش نیروی احساس شده توسط مسافران در اثر نوسانان سطح جاده
– افزایش مقاومت و استحکام فیزیکی خودرو با کاهش اثر نوسانان جاده در نوسانات ناخواسته میان بدنه و شاسی خودرو
پروژه متلب ارزان:
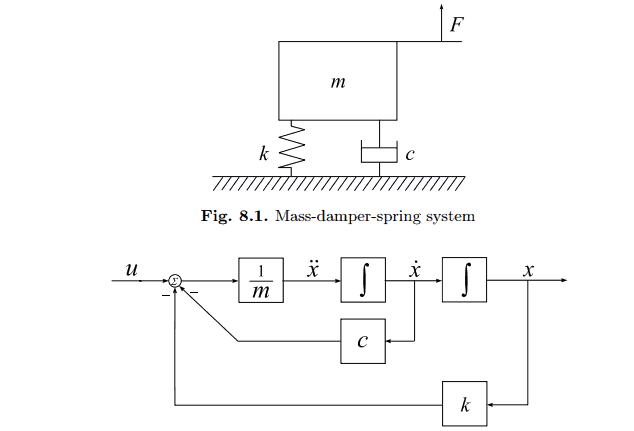
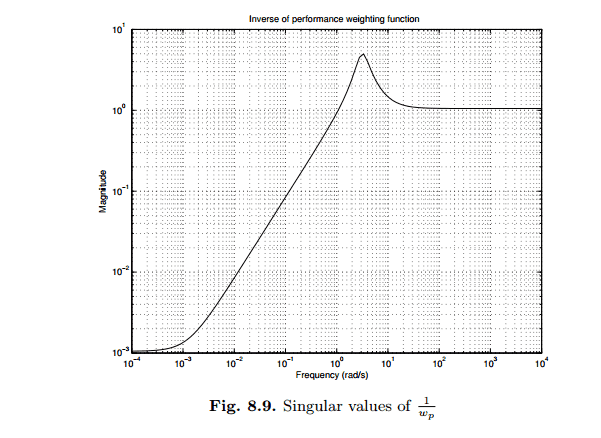
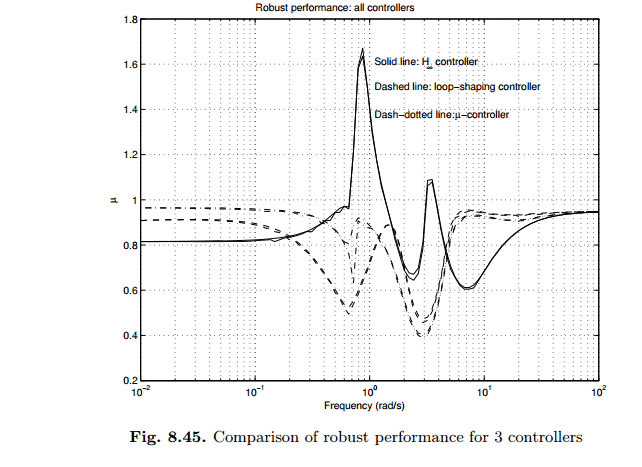
خروجی متلب :
http://www.porojeamadematlab.ir
تنها وبسایت پروژه متلب ارزان
کنترل کننده مقاوم، جرم و فنر، سیستم های کنترل، قابلیت اطمینان، کنترل کننده مقاوم، matlab,matlab project،شبیه سازی،پروژه متلب ارزان
لطفاً براي ارسال دیدگاه، ابتدا وارد حساب كاربري خود بشويد