طراحی الگوریتم پردازش تصویر برای ردیابی اشیاء متحرک قسمت اول:انجام پروژه متلب
طراحی الگوریتم پردازش تصویر برای ردیابی اشیاء متحرک : پروژه شبیه سازی متلب
چکیده
پروژه شبیه سازی متلب : یکی از مسائل مهم و درحال توسعه در پردازش تصویر و بینایی ماشین ، مسألۀ ردیابی اشیاء است
در واقع ردیابی اشیاء، نمایش تغییرات موقعیت یک شئ و دنبال کردن آن در یک دنبالۀ تصاویر ویدیویی، با یک هدف خاص میباشد. اگر چه سابقۀ ایجاد پدیده ردیابی اشیاء به مسائل نظامی بر میگردد ولی امروزه به دلیل کاربردهای بسیار گسترده ردیابی اشیاء در زمینه های مختلف این مقوله و جوانب مختلف آن در سالهای اخیر (عمدتاً از ١٩٨٠ به بعد ) مورد توجه ویژه ای قرار گرفته است .در این پروژه درباره نحوه تشخیص اشیاء ،ردیابی و روشهای تخمین حرکتی صحبت شده است .
در نهایت برای پیاده سازی ردیابی از الگوریتم جریان نوری استفاده شده است .در این روش با استفاده از اختصاص بردار حرکت برای هر پیکسل شئ مورد نظر ردیابی می شود.درپیاده سازی این روش با مشکل پنجره مواجه می شویم که برای حل آن از روش Lucas kanadبهره گرفته شده و بر روی پایگاه داده تهیه شده ، درپیاده سازی این الگوریتم از ابزار بسیار قوی و کامل Open cv که محصول شرکت اینتل و مخصوص پردازش تصویر می باشد استفاده شده است .
کلمات کلیدی:.ردیابی شئ،تشخیص و جداسازی،جریان نوری،تخمین حرکت .
فصل اول
١-١) مقدمه
پروژه شبیه سازی متلب :یکی از مسائل مهم و درحال توسعه در پردازش تصویر و بینایی ماشین ، مسألۀ ردیـابی اشـیاء است . در واقع ردیابی اشیاء، نمایش تغییرات موقعیت یک شـئ و دنبـال کـردن آن در یـک دنبالـۀ تصاویر ویدیویی، با یک هدف خاص میباشد.
١-٢) سابقه
پیشینه ایجاد پدیده ردیابی اشیاء به مسائل نظامی بر میگردد، در واقع مسائلی چـون هـدف یابی مخصوصاً اهداف متحرک، ردیابی مسیر موشک شلیک شده برای اطمینان از صحت عمل هدف گیری و یا ردیابی مسیر موشک شلیک شده از سوی دشمن برای جلوگیری از اصابت آن به هدف و یا هدف گیری موشک دشمن در آسمان و مسائلی از این قبیل باعث پدید آمدن یک مقولۀ جدید به نام ردیابی اشیاء در زمینۀ پردازش تصاویر نظامی گردید. این مقوله و جوانب مختلف آن در سالهای اخیر (عمدتاً از ١٩٨٠ به بعد ) مورد توجه ویژه ای قرار گرفته است .
١-٣)کاربردها
امروزه به دلیل کاربردهای بسیار گسترده ردیابی اشیاء در زمینه های مختلف به جزء زمینـه های نظامی مانند زمینه های اکتشافی در حوزه هوانوردی، فشرده سـازی هوشـمند ویـدئو، مراقبـت ویدئویی، کنترل مبتنی بر بینایی ماشین ، ارتباط مفهومی کامپیوتر با انسان ، تصویربرداری پزشکی و رباتیک ،زیر سطحی، زیر دریا، تعیین مسیر حرکت دسته های پرندگان یا گله های ماهی و…، زمینه های پزشکی مانند ردیابی مسیر دارو و یا حتی اشیاء خارجی قرار داده شده در بدن و بسیاری زمینه های دیگراز جمله جوانب مرتبط با مقوله ردیابی اشیاء، ارائه الگوریتمهایی است که در مقابل پدیـده هایی چون تغییر روشنایی١ محیط ، همپوشانی٢ اشیاء، عدم حرکت اشـیاء بـا سـرعت ثابـت و یـا در راستای یک خط مستقیم و … از پایایی کافی بر خوردار بوده و حتی الامکان قابـل پیـاده سـازی در کاربردهای بی درنگ ٣ باشند.
ارائه چنین الگوریتمهایی در درجه اول نیاز به مطالعه و تحقیق کافی در مورد چگونگی و انواع حرکتهای اشیاء و مفاهیم مرتبط با آنها، انواع روشهای شناسایی حرکت و تخمین حرکت و مزایـا و معایب این روشها نسبت به یکدیگر، مسألۀ حرکت نسبی شئ ، دوربین ، بیان توابع ، روابط ریاضی و هندسی ای که این حرکات را در قالب پارامترهای ریاضی قابـل تعیـین و تخمـین میـسر سـازد و
همچنین نحوه پارامتری کردن محیط حرکت و شناخت این مسأله و روشهای فائق آمـدن بـر ایـن مشکلات در ردیابی و … دارد.
١-۴) اهداف پروژه
با توجه به نیاز رو به گسترش سامانه های ردیاب در کاربردهای گوناگون و مشکلات ذکر شـده در این زمینه و اهمیت کار در زمینه تحقیق و مطالعه سامانه های ردیاب مشخص میشود. در ایـن پروژه سعی شده است ، یک روش توانمند برای ردیابی اشیاء متحرک معرفی شود. دامنه کاربرد ایـن روش بر روی ویدئوهای گرفته شده با دوربین ثابت است و ردیابی بر روی انسان انجام میگیرد.
١- )ساختار پایان نامه
در فصل دوم ، روشهای تخمین حرکت بر پایه ویژگی ومفهوم میـدان حرکـت و بـردار حرکـت و نحوه نمایش آنها که از جمله مفاهیم مهم در زمینۀ تخمین حرکت و ردیابی هستند بیان میشـود.
در ادامه مفهوم حرکت سه بعدی یک شئ صلب و ساده سازیها وتقریب هایی که برای مدل کردن آن بکار میروند و مزایا و معایب هر یک بیان میشوند.
در فصل سوم ، پدیده شار نوری ب١ه عنوان روش پیشنهادی در دنیای پـردازش تـصویر معرفـی میشود. سپس انواع الگوریتمهای تخمین حرکت دو بعدی که بر پایۀ این معادله پدید آمده انـد بـه همراه روابط و مزایا و معایب مربوط به هر یک معرفی و بررسی میگردند.
فصل چهارم مقایسه روشهای مختلف ونیز نتایج عملی بدسـت آمـده از طریـق الگـوریتم پیـشنهادی
ومعرفی نرم افزار استفاده شده را در بر میگیرد.
فصل پنجم نیز یک جمع بندی کلی از آنچه در این پایان نامه آمده است خواهیم داشت و به نتیجه گیری از آنچه آورده شده است میپردازیم در انتها پیشنهاداتی برای انجام کارهـا وتحقیقـات آتـی می آوریم .
فصل دوم
ادبیات موضوع
-١) مقدمه
پروژه شبیه سازی متلب :از آنجا که در این پروژه روشی برای ردیابی اشیاء متحرک بیان می شود لذا لازم است تا ابتدا روش های مختلف که اساس کار آنها با هم متفاوت است را بیان کنیم .محدودیت های کار برد هر یـک را بیان کنیم . روش های مختلف در سامانه های ردیاب وجود دارند که عمده آنها ، به دو دستۀ اصـلی طبقه بندی میشوند: ١) روشهای مبتنی بر ویژگی ٢) روشهای مبتنی بر شدت روشنایی، مـا در این فصل ابتداتخمین حرکت و ردیابی بر اساس ویژگی را بررسی میکنیم . مزایـا و معایـب آنهـا را بیان می کنیم . سپس در فصل بعـد روش مبتنـی بـر روشـنائی را کـه اسـاس پیـاده سـازی وروش پیشنهادی می باشد شرح می دهیم .
٢-٢)روشهای تخمین حرکت دو بعدی بر پایه ویژگی
در روشهای مبتنی بر ویژگی نخست مشخصاتی از شئ یا اشیائی که باید ردیابی شوند یـا حرکـت آنها تخمین زده شود، در نظـر گرفتـه مـیشـود کـه ایـن مشخـصات بوسـیلۀ کـاربر و یـا بوسـیلۀ الگوریتمهای انتخاب ویژگی تعیین میگردند. شناسایی و ردیابی اشیاء بر پایـۀ همـین مشخـصات و ویژگیها انجام میشود، به این گونه که در هر فریم از دنبالۀ تصاویر ویدئویی، این ویژگیها جـستجو شده و با تطبیق این ویژگیها در فریمهای متوالی ، پروسۀ ردیابی وتخمین حرکت صورت مـیگیـرد.
وجود روشهای متنوع جستجوی ویژگـی و تطبیـق ، باعـث بوجـود آمـدن طیـف بـسیار وسـیعی از الگوریتمهای ردیابی ویژگی گردیده است . در واقع در روشهای مبتنی بـر ویژگـی دو سـئوال اصـلی مطرح است که باید پاسخ داده شوند: اول اینکه چه مشخـصات و ویژگیهـایی انتخـاب شـوند و دوم اینکه آنها چگونه فریم به فریم ردیابی و دنبال شوند. پاسخ به این دو سئوال ، پایۀ کلیۀ الگوریتمهایی که از روش ویژگی در ردیابی استفاده میکنند تشکیل میدهد.
-٣) ردیابی ویژگی
در واقع مهمترین دلیل استفاده از روش ردیابی بر پایۀ ویژگی و یا استفاده از آن در کنار یکی از روشهای ردیابی دیگر ایجاد یک الگوریتم ردیابی است که در مقابل تغییرات ناشی از تغییر شـدت روشنایی محیط و یا تغییر زاویۀ دید از قدرت بیشتری برخوردار باشد.
بسیاری از ویژگیها، برای مثال ویژگی لبه ، حساسیت کمتری در مقابـل ایـن تغییـرات دارنـد.
بعضی از ویژگیها مانند ویژگی گوشه نیز به طور محلی دارای قابلیت شناسایی دقیق هستند. مکـان این ویژگیها میتواند مکان مناسبی برای محاسبات هندسی مانند تخمین حرکت دوربین نسبت بـه صحنه باشد. ایجاد یک الگوریتم ردیابی مناسب بر پایۀ ویژگی ، در وهلۀ اول مستلزم شناخت کـافی از ویژگیها و مشخصات شئ ای که میخواهد ردیابی شود است تا بتوان از شناساگرهای متناسب بـا آنها استفاده کرد. اکثر الگوریتمهای ردیابی ویژگی ، یک حلقۀ چهار مرحله ای مطابق شـکل ۵-١ را
دنبال میکنند :
١) پیش بینی کردن
٢) شناسایی ویژگی
٣) مطابقت دادن
۴) بازیابی اطلاعات
نخست مکان ویژگی در فریم بعدی بر اساس مکانهای قبلی آن و مدل حرکت پیش بینی می – شود. سپس تعدادی ویژگی کاندید شناسایی شده و با ویژگی اصلی مطابقت داده مـیشـوند. آنگـاه بهترین تطبیق بر اساس معیار تطبیق بهینه انتخاب میشود. البته الگوریتمهای ردیابی در اینکه چه ویژگیهائی را انتخاب کنند و پیش بینی را چگونه انجام دهند و چه معیار تطبیقی را بکار بگیرند بـا یکدیگر متفاوت هستند.
مرحلۀ پیش بینی بر پایۀ حرکت شئ از یک فریم به فریم بعدی و مدل حرکت انتخابی مـی- باشد که مدل حرکت از مدلهای سـاده ماننـد مـدل سـرعت ثابـت تـا مـدلهای پـارامتری پیچیـده وحرکتهای با توزیع احتمال خاص میتواند باشد.
شکل ١-١: مراحل یک الگوریتم ردیابی ویژگی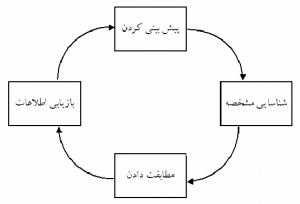
مرحلۀ تطبیق بر اساس ایجاد رابطه بین مکان اصلی ویژگی و مکانهای پیش بینی شده اسـت یک روش معمول ، ماکزیمم کردن کورولیشن بین قطعه های تصویر در اطراف مکان اصلی ویژگی و کاندیدها است . به عبارت دیگر اختلاف بین ویژگی اصلی و کاندیدها مینیمم شود.
در بسیاری کاربردها، مراحل بالا متناسب با یکدیگر هستند. مثلاً، مدل حرکت اسـتفاده شـده در مرحلۀ پیش بینی، میتواند برای معیار تطبیق نیز بکار رود. همچنین مدل حرکـت بـرای پـیش بینی حضور ویژگی و در نتیجه شناسایی آن نیز میتواند استفاده شود.
اینکه چه ویژگیهائی را برای ردیابی انتخاب کنیم ، کاملاً به نوع کاربرد و نوع تـصاویر بـستگی دارد. البته در سالهای اخیر کارهایی برای شناسایی اتوماتیک ویژگی از طریق یافتن نقاطی که فرض تغییرات وابستۀ محلی را برآورده میکنند انجام شده است که از آن جمله میتوان به روش Shi and
-Tomasi ١٩٩۴اشاره کرد [٢١،٢٠،١٩].
برای نمونه در [٢٢] ، یک الگوریتم ردیابی بر اساس ویژگی برای پردازش تصاویر زیر دریـا بـا استفاده از روش شناسایی اتوماتیک فوق ارائه گردیده است . پردازش تصاویر زیر دریا به منظور نصب تجهیزات صنعتی، قراردادن اهداف در مسیر و موقعیت از پیش تعیین شده آنها، حفـظ و نگهـداری لوله های زیر دریا، عمل موزائیک بندی وتصویر برداری از کف دریا و غیره صورت میگیرد و از آنجا که ردیابی، یک قسمت اصلی در پردازش تصاویر گرفته شده از زیر دریا بـا اهـداف فـوق مـیباشـد، اهمیت انتخاب درست وصحیح ویژگی در الگوریتم ردیابی بیش از پیش نمایان میگردد. ردیـابی در چنین الگوریتمهایی به معنی تخمین حرکت یک یا چند ناحیه در فریمهای دنبالۀ تصاویر است .
روشهای مبتنی بر ویژگی را بسته به ویژگیهایی که مد نظر قرار میگیرند، مـیتـوان بـه پـنج
دستۀ کلی تقسیم کرد:
١) روشهای مبتنی بر ویژگیهای کلی
٢) روشهای مبتنی بر ویژگیهای جزئی
٣) روشهای مبتنی بر ویژگیهای جزئی ـ کلی
۴) روشهای مبتنی بر همبستگی ویژگیها
۵) روشهای مبتنی بر یک الگوی خاص
٢-۴) روشهای مبتنی بر ویژگیهای کلی
ویژگیهای کلی، ویژگیهایی مانند محیط ، مساحت ، شکل ، رنگ و مرکز ثقل هـستند. مـشخص است که در روشهایی که از ویژگی محیط یا مساحت استفاده میکنند، شئ مورد نظر باید بـه طـور کامل و بدون همپوشانی با سایر اشیاء در هر فریم ظاهر گردد. زیـرا همپوشـانی آن بـا سـایر اشـیاء ممکن است باعث گم شدن شئ در پروسۀ ردیابی شود. همچنین تنها استفاده کـردن از مشخـصات محیط یا مساحت ، درصد خطای پروسه را افزایش میدهد، چون ممکن است اشیاء دیگـری نیـز بـا همان محیط یا مساحت در فضای تصویر شـده وجـود داشـته باشـند و ایـن امـر لـزوم اسـتفاده از مشخصات دیگری از شئ مورد نظر را در کنار مشخصات محیط یا مساحت ایجاب میکند.
روشهایی که از مشخصات شکل استفاده میکنند نیز نیاز به جداسازی اشیاء از یکدیگر دارنـد و وجود اشیاء متعدد در صحنه و همپوشانی آنها با یکدیگر و همچنین سایه هایی کـه روی یکـدیگر میاندازند، کار شناسایی وردیابی شئ مورد نظر را دشوار میسازد [٢٣] و در بعضی مواقع نیز وجود کلاترهای پس زمینه ، شناسایی داده صحیح از کلاتر را با مـشکل مواجـه مـیکنـد. عملکـرد فیلتـر کالمن که از گسترده ترین روشها در ردیابی اشیاء است ، از جمله مواردی اسـت کـه بـه شـدت بـه حضور چند شئ متحرک در صحنه و وجود کلاتر بستگی دارد. این امر لزوم استفاده از الگوریتمهای ردیابی براساس مشخصۀ شکل که در مقابل کلاتر از قدرت بیشتری برخوردار هستند را نشان مـی- دهد [٢۴].
ویدیو زیر را ملاحظه کنید:
روشهایی که از مشخصات شکل استفاده مـیکننـد، در الگوریتمهـای شناسـایی صـورت و یـا الگوریتمهای شناسایی انسان کاربرد بسیار زیادی دارند [٢۵]. شکل ٢-٢ نتایج یکی از این روشها را نشان میدهد. در الگوریتم نشان داده شده در شکل ٢-٢، نخست صورت فرد ناحیه بندی شده و در هر ناحیه ، از روی مشخصات شکلی کـه قـبلاً در الگـوریتم منظـور شـده اسـت بـرای مثـال محـل قرارگرفتن ابروها نسبت به چشمها و یا محل و نحوه قرارگیری بینی و لبها نسبت به یکدیگر، نقـاط خاصی جستجو میشوند که در نهایت نقاط یافت شده در این الگوریتم ، مشخـصات صـورت فـرد از جمله گردی صورت ، محدوده چشمها و ابروها، محدوده بینـی و لبهـا و محـدوده موهـا را بـه دقـت مشخص میکنند.
(الف ) (ب )

(ج ) (د)

شکل ٢-٢ (الف )ناحیه بندی صورت -(ب )استفاده از نحوه قرار گرفتن اچزاء صورت -(ج )استفاده از گودی چشم و محل
قرار گیری بینی ولب و ابرو-( )استفاده ازمرز اچزاء صورت [٢۵]
در بعضی از الگوریتمها، از مشخصات شکل و رنگ در کنار یکدیگر [٢۶] و در بعضی دیگر تنها از هیستوگرام نرمال شده رنگ [٢٧] ودر برخی، از هیستوگرام رنگ به همراه شناسایی دقیق طیـف رنگ [٢٨] برای شناسایی صورت استفاده می شود.
با تغییر زاویۀ دید و حرکات شئ و دوربین نسبت به یکدیگر، بسیاری از ویژگیها مانند شـکل ، اندازه ، محیط و مساحت شئ تغییر میکنند. اما یک ویژگی که نسبتاً ثابت بـاقی مـیمانـد، ویژگـی رنگ و یا هیستوگرام رنگ است . علاوه بر این ، شناسایی و دنبال کردن اشیاء بر اساس ویژگی رنـگ ساده است . الگوریتمهایی که از ویژگی رنگ استفاده میکنند، معمولاً الگوریتمهـای سـریع ، مـوثر و قابل کاربرد در سیستمهای ردیابی بی درنگ میباشند [٢٨]. البته باید توجه داشت که ممکن است این ویژگی همواره یک ویژگی کاملاً مطلوب در دنبال کردن اشیاء نباشد. مـثلاً زمـانی کـه چنـدین منبع نور رنگی و یا اشیاء مختلف با رنگهای متفاوت و در نتیجه سـطوح بازتـابش متفـاوت در فـضا وجود دارد، اطلاعات رنگ ویاهیستوگرام رنگ شئ میتواند تغییر کند. یک مثال ملموس آن ، سطوح خارجی و شیشه های اتومبیل هستند که شبیه آینه عمل کرده و با بازتابش نور باعث تغییـر طیـف روشنایی در دنبالۀ تصویر شده و لذا الگوریتمهای ردیابی مخصوصاً آنهایی که از آسـتانه گـذاری در ردیابی استفاده میکنند را با مشکل روبه رو میسازند. این مشکل در الگوریتمهـای ردیـابی صـورت نیز بسیار بوجود میآید. بنابراین واضح است که در صورتی که تـصاویر نخـست در مقابـل تغییـرات
شدت روشـنایی تـصحیح شـوند، الگـوریتم ردیـابی عملکـرد بهتـری خواهـد داشـت . بـرای نمونـه الگوریتمهای ردیابی در [٣٠،٢٩] به گونه ای طراحی شده اند که خـود را در مقابـل شـرایط تغییـر شدت روشنایی وفق میدهند و یا در[٣١] از یک الگوریتم رنگ وفقی که متناوباً اطلاعات رنگ شئ را با اطلاعات موقعیت و اندازه شئ ترکیب کرده و آنها را در فضای تصویر و فضای رنگ وفـق مـی- دهد، استفاده شده است . اما علاوه بر این ، اگر نواحی با بازتابش شدید که باعث تغییـرات زیـادی در طیف روشنایی میشوند نیز شناسایی و جبران شوند، مطمئناً عملکرد الگوریتم ردیابی بسیار بهبـود مییابد. در [٢٨] روشی برای شناسایی و جبران این نواحی بیان شده است . بر اساس توضیحات بالا، دنبال کردن شئ تنها بر اساس ویژگی رنگ ، در بعضی موارد میتواند کار دنبال کردن شئ را دشوار سازد و درصد خطای آن را افزایش دهد.
٢-۵) روشهای مبتنی بر ویژگیهای جزئی
ویژگیهای جزئی، ویژگیهایی مانند خطوط ، منحنیها، مرزها، گوشه ها، نقطه ها، لبه ها، فواصل و غیره هستند. لبه ها معمولاً به نقاطی که روشنایی تصویر در آنها دارای یک تغییـر ناگهـانی اسـت گفته میشود.
در [٣٢] تنها از لبه های متحرک افقی و عمودی برای ردیابی اشیاء متحرک در صحنۀ تصویر استفاده شده است که نتایج این ردیابی را درشکل ٢-٣ میبینید. از روشـهای شناسـایی لبـه بـرای شناسایی مرزهای اشیاء نیز میتوان استفاده کرد [٣٣].
در سالهای اخیر از روش لبۀ وفقی و یا snake برای شناسایی مرزهایی که دارای هیچ شکل و
قاعده خاصی نیستند بهره گرفته شده است .
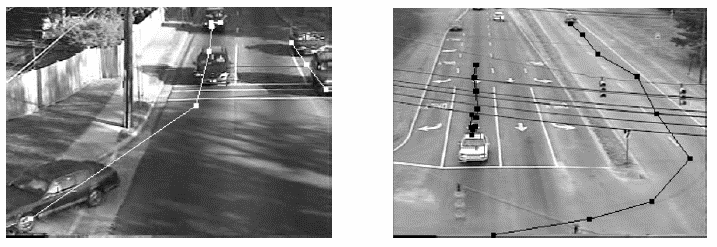
شکل ٢-٣:(الف ) استفاده از خطوط -(ب )اسـتفاده از لبـه هـای متحـرک افقـی و عمـودی بـرای ردیـابی اشـیاء متحرک[٣٣]
گوشه ها نقاط لبه ای هستندکه منحنی تغییر شدت روشنایی در آنها دارای یـک مـاکزیمم محلـی باشد. نقاط گوشه بر خلاف خطوط ، به خوبی به صورت محلی قابل شناسایی وتفکیک هستند. در الگوریتم قدرتمندی برای ردیابی بر اساس مشخصات طبیعـی مانندگوشـه کـه هـم قابلیـت کالیبره شدن و هم پایداری در برابر نویز و همپوشانی را دارد ارائـه گردیـده اسـت . حفـره هـا٨ کـه تاریکترین یا روشنترین نواحی محلی را در تصاویر غیر رنگی نشان مـیدهنـد، عـلاوه بـر شـیارها و نواحی با خصوصیت خاص از دیگر ویژگیهای جزئی هستند که میتوانند برای ردیـابی اشـیاء مـورد استفاده قرار گیرند. شکل ٢-۴، نمونه هایی از شناسایی گوشه و حفره را نشان میدهد. در شکل ٢-
۴-الف ، تصویر اصلی به همراه نتایج الگوریتم شناسایی و انتخاب گوشه نشان داده شده است که این نقاط گوشه در فریمهای بعدی جستجو و ردیابی خواهند شد. شکل ٢-۴-ب نیز تصویر اصـلی را بـه همراه نتایج الگوریتم شناسایی حفره نشان میدهد که این حفره ها نیز در فریمهـای بعـدی دنبـال خواهند شد.
شکل ٢-۴(الف ) نمونه نتایج الگوریتمهای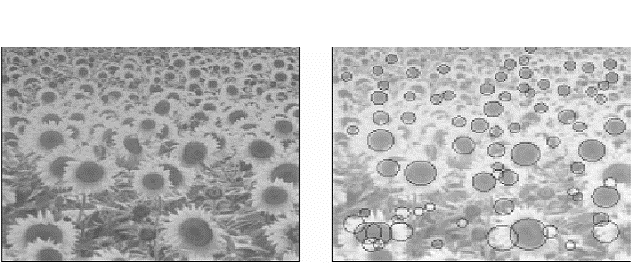 شناسایی گوشه -(ب ) نمونه نتایج الگوریتمهای شناسایی گوشه
شناسایی گوشه -(ب ) نمونه نتایج الگوریتمهای شناسایی گوشه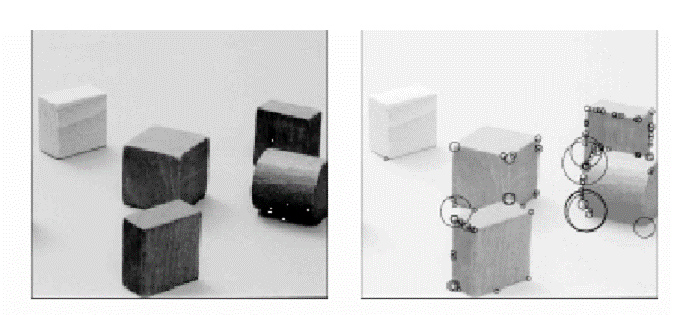
حفره [٣۴]
در [١٨] روشهای متعددی برای شناسـایی ویژگیهـایی چـون گوشـه ، لبـه ، حفـره و شـیار و همچنین الگوریتم کاملی برای ردیابی این ویژگیها ارائه شده است که نمونۀ نتایج آن در شکل ٢-۵
نشان داده شده است . توجه کنید که در ردیابی قطار، دوربین ثابت است و قطار متحرک مـیباشـد.
در حالی که در ردیابی تلفن ، دوربین حرکت میکند و تلفن ثابت است .
ردیابی با مشخ(صالۀح)فره و به روش انتخاب وفقی ردیابی با مشخ(صۀب )گوشه و به روش
نمونه نتایج ردیابی در فریمهای ٣٠ و٩٠ و١۵٠ نمونه نتایج ردیابی در فریمهای ٣٠
نقطه ها از دیگر ویژگیهای جزئی هستند که در ردیابی به روش ویژگی مورد استفاده قرار میگیرند.
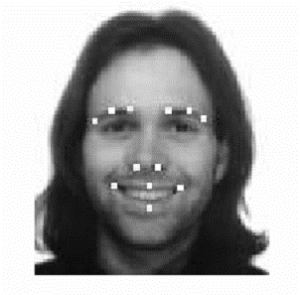
یکی از کاربردهای وسیع ردیابی با مشخصۀ نقطه ، ردیـابی صـورت انـسان اسـت [٣۶،٣۵]. در
روشها صورت انسان با یک مجموعه نقاط خاص مشخص گردیده و این نقـاط در فریمهـای متـوالی شناسایی و ردیابی میگردند. شکل ٢-۶ نمونه ای از ردیابی صورت انسان با مشخصۀ نقطه را نـشان میدهد. همانگونه که در شکل ٢-۶-الف نشان داده شده است ، نخست صورت فرد با یـک مجموعـۀ ١٢ تایی از نقاط خاص برای مثال نقاط تعیین کننده محدوده ابروها و بینی و لبها مشخص گردیده است که روش مشخص کردن این نقاط میتواند به صورت دستی یا با استفاده از ابزارهـای طراحـی باشد. در مرحلۀ بعد، این نقاط در هر فریم جدید از دنبالۀ تصاویر با توجـه بـه مکـان آنهـا در فـریم قبلی، در یک محدوده از پیش تعیین شده جستجو و یافت میشوند و بـدین ترتیـب عمـل ردیـابی انجام میگرددکه نتایج جستجوی نقاط تعیین کننده محل بینی در دو فریم متوالی را در شـکل ٢-
۶-ب مشاهده میکنید
(الف )
 (ب )
(ب )
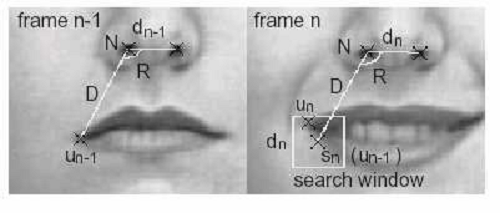
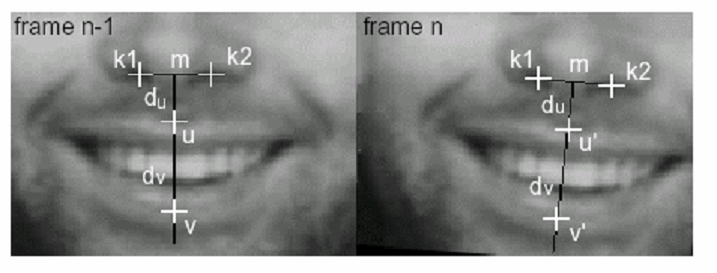
شکل ٢-۶(الف )انتخاب نقاط مناسب برای ردیابی صورت انسان -(ب ) ردیابی نقاط مورد نظر در دو فریم متوالی ردیابی با اندازه گیری فواصل ، از دیگر روشهای ردیـابی مخـصوصاً در ردیـابی صـورت انـسان است [٣۵ . در این روشها یک مجموعه فواصل خاص ، به عنوان مثال فاصلۀ گوشۀ لب از بینـی یـا از ابرو یا فاصلۀ دو چشم از هم در صورت انسان اندازه گیری شده و سپس این فواصل مبنـای ردیـابی در فریمهای متوالی قرار میگیرند. شکل ٢-٧ ردیابی با فواصل را در صورت انسان نـشان مـیدهـد.
مطابق شکل ٢-٧-الف ، نخست فاصلۀ دو سوراخ بینی از هم و فاصلۀ وسـط خـط واصـل دو سـوراخ بینی از لب بالایی و لب پایینی و همچنین فاصلۀ لب بالایی از پایینی اندازه گیری شده و به عنـوان مبنا در نظر گرفته میشوند. در مرحله بعد، از آنجا که فاصـلۀ دو سـوراخ بینـی از هـم و همچنـین فاصلۀ آنها از لبها (مشروط به اینکه لبها در حالتی خاص قرار نگیرند) ثابت بـاقی مـیمانـد، لـذا بـه راحتی با جستجوی یکی از این نقاط با توجه به مکان قبلی اش در فریم قبل و یافتن آن ، میتوان مکان سایر نقاط را نیز مطابق شکل ٢-٧-ب تعیین کرده و آنها را در فریمهای متوالی ردیابی کنیم .
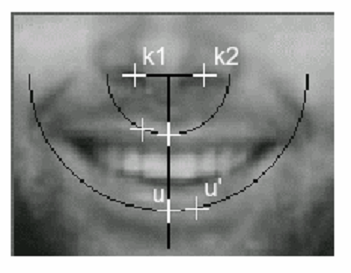
شکل ٢-٧:(الف ) اندازه گیری فواصل در صورت انـسان -(ب )ردیـابی فواصـل انـدازه گیـری شـده در دو فـریم
متوالی [٣۵]
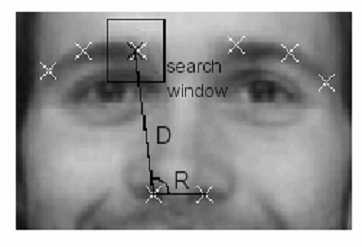
در کنار انتخاب فواصل ، میتوان زوایایی که در فریمهای متوالی ثابت باقی میمانند را نیـز بـه عنوان مشخصات ردیابی در نظر گرفت . برای مثال در صورت انسان میتوان زاویۀ بین سوراخ بینـی وگوشۀ ابرو یا گوشۀ لب را انتخاب کرد. شکل ٢-٨ ردیابی با اسـتفاده تـوأم از مشخـصات فاصـله و زاویه در صورت انسان را نشان میدهد. در شکل ٢-٨-الـف ، فاصـلۀ دو سـوراخ بینـی و زاویـۀ بـین سوراخ بینی و گوشۀ ابرو به عنوان ویژگی در نظر گرفته شده است . شکل ٢-٨-ب نیز ردیابی در دو فریم متوالی با استفاده از مشخصات فاصلۀ دو سوراخ بینی و زاویۀ بین سوراخ بینـی وگوشـۀ لـب را نشان میدهد. البته از آنجا که حالت لب میتواند تغییر کند، لـذا همانگونـه کـه در شـکل ٢-٨-ب مشاهده میکنید، برای یافتن نقطۀ گوشۀ لب علاوه بر مشخصۀ زاویه باید یک ناحیه جستجو نیز در نظر گرفته شود.
(الف )
(ب )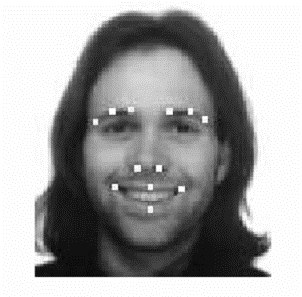
شکل ٢-٨: (الف ) استفاده توأم از مشخصات فاصله و زاویه در صورت انسان -(ب )ردیابی این مشخصات در دو
فریم متوالی[٣۵]
به طور کلی، برای دنبال کردن یک شئ، ابتدا در فریم اول ، گوشه ها، لبه ها، حفره ها، منحنی مرز بیرونی شئ و یا هر مشخصۀ دیگـری از شـئ شناسـایی و تعیـین شـده و سـپس بـا یـافتن آن مشخصات در فریمهای متوالی، میتوان شئ مورد نظر را دنبال کرد.
روشهای مبتنی بر ویژگیهای جزئی و کلی، روشهای نـسبتاً سـریعی هـستند و مـیتواننـد در کاربردهای بی درنگ بکار روند. این روشها در برابر همپوشانی جزئی تاحدودی پایا هـستند ولـی در برابر همپوشانی کامل ، کارایی خود را از دست میدهند. همچنین اگر حرکت نسبی شـئ و دوربـین نسبت به یکدیگر باعث تغییر در ویژگیهای استخراج شده از شئ شود، عمل ردیـابی شـئ را دشـوار کرده و این روشها را از دنبال کردن شئ باز میدارد.
٢-۶) روشهای مبتنی بر ویژگیهای جزئی ـ کلی
روشهایی که تاکنون در مورد آنها صحبت شد، از یک یا چند ویژگی کلی و یـا یـک یـا چنـد ویژگی جزئی برای ردیابی اشیاء استفاده میکردند. اما در بعضی روشها، ترکیبی از ویژگیهای جزئـی و کلی به طور توأم استفاده میگردد. مزیت این کار، افـزایش کـارایی، دقـت و پایـایی الگـوریتم در مقابل نویز، کلاتر و تغییر شدت روشنایی است . به عنوان مثال در [٣٧] از ترکیبی از مشخصات لبه
وگرادیان ، به همراه اطلاعات رنگ ، ساختار، شکل و ناحیه برای ردیابی شئ استفاده شده است .
شکل ٢۵-٩ نتایج ردیابی را نشان میدهد. مطابق شکل ٢-٩-الف ، نخست در فریم اول ناحیـه ای که میخواهد ردیابی شود یعنی سر کودک با یک مرز بسته تعیین میگردد که انتخاب این مرز نیز میتواند به روشهای مختلف مثلاً به صورت دستی یا با ابزارهای طراحی و یا با الگوریتمهـای تعیـین مرزهای فعال انجام شود.
سپس مشخصات این ناحیه برای مثال هیستگرام رنگ ، مساحت ، گرادیان مرزهای این ناحیـه ، مشخصات لبه ها دراین ناحیه در کنار مشخصات ساختاری و شکلی چون محل قـرار گـرفتن موهـا نسبت به صورت استخراج شده و در ردیابی مورد استفاده قرار میگیرند. در هر فریم جدیـد، ناحیـۀ مورد نظر با توجه به مکان آن در فریم قبلی و همچنین مشخصات هیستگرام رنگ و گرادیان مرزها جستجو شده و سپس با بررسی سایر مشخصات داخلی ناحیه یعنی مشخصات لبه ، مساحت ، ساختار و شکل ، بهترین کاندید برای ناحیۀ مورد نظر انتخاب میشود. شکل ٢-٩-ب نتایج ردیـابی را نـشان میدهد.
مجموعه مشخصات خاص از ناحیۀ داخلی این مرز بسته استخراج میشود. آنگـاه مکـان مـرز بسته با توجه به این مشخصات خاص در فریمهای متوالی جستجو و ردیابی میگردد. در هـر فـریم جدید، در مرحلۀ اول مکان تقریبی مرز بسته با توجـه بـه تخمـین میـدان حرکـت در چنـد نقطـۀ انتخابی روی مرز مشخص میشود که میتوان از روش تقریب چند ضلعی [١٧] برای تعیین چنـد نقطۀ خاص روی مرز و از معادلۀ شار نوری [١٠] برای تخمین میدان حرکت استفاده کرد.
در مرحلۀ بعد نیز با توجه به مشخصات ناحیۀ در حال ردیابی، بهترین مرز بسته انتخاب مـی- شود، به این صورت که چندین مرتبه با روش B-spline [٣٨] مرز تقریبی تغییر داده میشود و هر بار مشخصات ناحیه با مشخصات مورد نظر سنجیده میشـود تـا در نهایـت بهتـرین مـرز بـسته بـا نزدیکترین مشخصات به مشخصات مد نظر بدست آید [٣٨].
٢-٧) روشهای مبتنی بر همبستگی ویژگیها
در این روشها، همبستگی ویژگیها وارتباط هندسی بین آنها و یا تعیین ویژگی ارتباط هندسی بین شئ سه بعدی و دوربین [٣٩] مورد توجه قرار میگیرد. بنابراین واضـح اسـت کـه ایـن روشـها مستلزم محاسبات زیادی هستند و لذا هم هزینۀ بالایی دارند و هم از سرعت پایینی برخوردار مـی- باشند و برای کاربردهای بی درنگ مناسب نیستند [۴٠].
٢-٨) روشهای مبتنی بر یک الگوی خاص
در این روشها، یک ا لگوی خاص از ناحیه ای که باید جستجو، شناسایی و ردیابی شود بوسیلۀ یک تکنیک کلیک کردن و یا با توجه به یک تصویری که از قبل وجود دارد مورد توجه قرار میگیرد و سپس از طریق روشهای مختلف ، برای مثال روش HHFM9 [۴١] ، آن الگوی خاص در فریمهـای مختلف شناسایی و ردیابی میشود. در [۴٢] الگوریتمی بر اساس روش فوق بدون اینکه از اطلاعات رنگ استفاده شود بیان شده است که از مزایای آن میتوان سادگی، سرعت بالا، مینیمم اندازه شـئ تا۵٠ پیکسل و قدرت آن در مقابل تغییراتی مانند تغییـر روشـنایی، حرکـت انتقـالی و چـرخش در صفحۀ تصویر تا زاویۀ تقریباً ٩٠ درجه را بیان کرد
-٩) جمع بندی
در این فصل روشهائی که بر اساس ردیابی ویژگیها هستند ارائه شد. در ادامه مراحـل ردیـابی این ویژگیها گفتـه شـد.مهمتـرین تقـسیم بنـدی آنهـا بـر اسـاس جزئـی بـودن وکلـی بـودن مـی باشد.بـارزترین ویژگیهـای کلـی عبارتنـد از محیط ،مـساحت ،شکل و رنـگ مـی باشـند و بـارزترین ویژگیهای جزئی عبارتند از لبه ،خط ،مرز،گوشه ،حفره واندازه گیری فواصل معین می باشند که بطـور مفصل در باره آنها صحبت شد
- آموزش matlab4
- آموزش برنامه نویسی در متلب۱
- آموزش برنامه نویسی متلب۱
- آموزش سیمولینک متلب در برق قدرت۱
- آموزش متلب۳
- الکترونیک۱
- الگوریتم تکاملی۲
- الگوریتم های تکاملی۰
- انجام پایان نامه ارشد۰
- انجام پایان نامه برق۰
- انجام پایان نامه کارشناسی ارشد۰
- انجام پایان نامه مهندسی برق۰
- انجام پروژه الکترونیک۰
- انجام پروژه پردازش تصویر۰
- انجام پروژه شبیه سازی matlab0
- انجام پروژه متلب۱۴۱
- انجام پروژه متلب مکانیک۱
- انجام پروژه های داده کاوی۰
- انجام پروژه های دانشجویی۰
- انجام پروژه های دانشجویی برق۱
- انجام پروژه های دانشجویی برق الکترونیک۰
- انجام پروژه های دانشجویی برق قدرت۰
- انجام شبیه سازی مقالات برق کنترل۱
- برنامه متلب برای اندروید۰
- برنامه نویسی متلب۰
- بینایی ماشین۱
- پایان نامه رایگان۰
- پردازش تصویر در متلب۰
- پردازش صوت و سیگنال۱
- پروژه matlab0
- پروژه آماده متلب۲
- پروژه ارزان متلب۰
- پروژه دانشجویی۰
- پروژه رایگان متلب۱
- پروژه شبیه سازی۰
- پروژه شبیه سازی با متلب۰
- پروژه کارشناسی برق قدرت۰
- پروژه متلب۰
- پروژه محاسبات عددی با matlab0
- پروژه های پردازش تصویر۱
- پیاده سازی الگوریتم ژنتیک در متلب۰
- تشخیص بیماری ها و سرطان۰
- تشخیص چهره۰
- جزوه آموزش متلب۰
- جزوه متلب۰
- خانه متلب۰
- داده کاوی در متلب۰
- دانلود پایان نامه۰
- دانلود پروژه متلب۰
- دانلود پروژه های متلب۰
- دانلود متلب۰
- دانلود نرم افزارmatlab0
- دانلودنرم افزارمطلب۰
- دریافت پروژه برنامه نویسی۰
- رباتیک۰
- رسم نمودار در متلب۰
- ریاضیات مهندسی۰
- سایت تخصصی برق قدرت۰
- سایت تخصصی متلب۰
- سایت متلب۰
- سورس کد الگوریتم ژنتیک در متلب۰
- شبکه عصبی۰
- شبکه عصبی در متلب۰
- شبیه سازی با متلب۰
- شبیه سازی با متلب رشته برق۰
- شبیه سازی در متلب۱
- شبیه سازی سلول خورشیدی در متلب۰
- شبیه سازی شبکه های حسگر بی سیم با متلب۰
- شبیه سازی مقالات برق قدرت با متلب۰
- شبیه سازی مقاله با متلب۰
- طراحی کنترلر ها۰
- طریقه نصب نرم افزار متلب۰
- فیلترها۰
- فیلم آموزش متلب۰
- کاربرد متلب در مهندسی شیمی۰
- کد آماده الگوریتم ژنتیک در متلب۰
- کد متلب الگوریتم pso0
- کدنویسی در متلب۰
- کنترل غیرخطی۰
- کنترل فازی۲
- کنترل مدرن۰
- کنترلر چند متغیره۰
- متلب۰
- متلب دانلود۰
- محاسبات عددی۰
- مشاوره پایان نامه۰
- معادلات دیفرانسیل۱
- مقالات مهندسی برق۰
- مکانیک خودرو۲
- مهندسی برق قدرت۰
- مهندسی عمران۰
- مهندسی کامپیوتر۰
- مهندسی کنترل۰
- مهندسی مخابرات۰
- مهندسی مکانیک۰
- مهندسی هوافضا۰
- نرم افزار شبیه سازی۰
- نرم افزار متلب۰
- هزینه انجام پروژه متلب۰
- هوش مصنوعی۰
- یادگیری متلب۰
- آموزش matlab3
- آموزش برنامه نویسی در متلب۳
- آموزش برنامه نویسی متلب۳
- آموزش سیمولینک متلب در برق قدرت۳
- آموزش متلب۲
- انجام پایان نامه ارشد۲
- انجام پایان نامه برق۲
- انجام پایان نامه کارشناسی ارشد۲
- انجام پایان نامه مهندسی برق۲
- انجام پروژه الکترونیک۲
- انجام پروژه پردازش تصویر۲
- انجام پروژه شبیه سازی matlab2
- انجام پروژه متلب۳
- انتقال وتوزیع
- الکترونیک
- انفیس یا فازی عصبی
- بینایی ماشین
- پردازش تصویر
- پردازش سیگنال
- پردازش صوت
- پروژه متلب
- تشخیص بیماری ها و سرطان
- تشخیص چهره
- جزوات الکترونیکی
- رباتیک
- ریاضیات مهندسی
- شبکه عصبی
- شبکه قدرت
- طراحی کنترلر ها
- فیلترها
- کنترل غیرخطی
- کنترل فازی
- کنترل مدرن
- کنترلر چند متغیره
- لگوریتم های تکاملی
- محاسبات عددی
- مهندسی برق قدرت
- مهندسی پزشکی
- مهندسی عمران
- مهندسی کامپیوتر
- مهندسی کنترل
- مهندسی مخابرات
- مهندسی مکانیک
- مهندسی هوافضا
- هوش مصنوعی
- انجام پروژه متلب مکانیک۳
- انجام پروژه های داده کاوی۲
- انجام پروژه های دانشجویی۲
- انجام پروژه های دانشجویی برق۲
- انجام پروژه های دانشجویی برق الکترونیک۲
- انجام پروژه های دانشجویی برق قدرت۲
- انجام شبیه سازی مقالات برق کنترل۳
- برنامه متلب برای اندروید۳
- برنامه نویسی متلب۳
- پایان نامه رایگان۳
- پردازش تصویر در متلب۳
- پروژه matlab2
- پروژه آماده متلب۲
- پروژه ارزان متلب۲
- پروژه دانشجویی۲
- پروژه رایگان متلب۲
- پروژه شبیه سازی۲
- پروژه شبیه سازی با متلب۲
- پروژه کارشناسی برق قدرت۲
- پروژه متلب۲
- پروژه محاسبات عددی با matlab2
- پروژه های پردازش تصویر۲
- پیاده سازی الگوریتم ژنتیک در متلب۲
- جزوه آموزش متلب۲
- جزوه متلب۲
- خانه متلب۲
- داده کاوی در متلب۲
- دانلود پایان نامه۲
- دانلود پروژه متلب۲
- دانلود پروژه های متلب۲
- دانلود متلب۲
- دانلود نرم افزارmatlab2
- دانلودنرم افزارمطلب۲
- دریافت پروژه برنامه نویسی۲
- دستهبندی نشده۳
- رسم نمودار در متلب۲
- سایت تخصصی برق قدرت۲
- سایت تخصصی متلب۲
- سایت متلب۲
- سفارش پروژه متلب۲
- سورس کد الگوریتم ژنتیک در متلب۲
- شبکه عصبی۲
- شبکه عصبی در متلب۲
- شبیه سازی با متلب۲
- شبیه سازی با متلب رشته برق۲
- شبیه سازی در متلب۲
- شبیه سازی سلول خورشیدی در متلب۲
- شبیه سازی شبکه های حسگر بی سیم با متلب۲
- شبیه سازی مقالات برق قدرت با متلب۲
- شبیه سازی مقاله با متلب۲
- طریقه نصب نرم افزار متلب۲
- فیلم آموزش متلب۲
- کاربرد متلب در مهندسی شیمی۲
- کد آماده الگوریتم ژنتیک در متلب۲
- کد متلب الگوریتم pso2
- کدنویسی در متلب۲
- متلب۲
- متلب دانلود۲
- محاسبات عددی۲
- مشاوره پایان نامه۲
- مقالات مهندسی برق۲
- نرم افزار شبیه سازی۲
- نرم افزار متلب۲
- هزینه انجام پروژه متلب۲
- یادگیری متلب۲


لطفاً براي ارسال دیدگاه، ابتدا وارد حساب كاربري خود بشويد