کنترل اتوماتیک تولید AGC در دو سیستم قدرت شبکه شده در متلب
کنترل اتوماتیک تولید AGC در دو سیستم قدرت شبکه شده در متلب :پروژه متلب
پروژه متلب : لزوم کنترل توان حقیقی در یک سیستم قدرت
پروژه متلبدر یک سیستم قدرت به هم پیوسته فرکانس سیستم بستگی به تعادل توان حقیقی در آن سیستم دارد و با بروز یک تغییر یا اغتشاش در میزان بار سیستم، فرکانس سیستم دچار تغییر میشود که علت آن پاسخگویی به تغییرات بار توسط ژنراتورهای آن سیستم است که باعث تغییر سرعت چرخش ژنراتورها و به طبع آن تغییر فرکانس سیستم میشود. برای عملکرد رضایت بخش یک سیستم قدرت باید فرکانس کار سیستم ثابت بماند و همان گونه که بیان شد فرکانس کار سیستم بستگی به بار سیستم دارد پس باید یک مکانیزم کنترلی طراحی کرد که پس از بروز اغتشاش در یک سیستم این مکانیزم کنترلی به این تغییرات پاسخ سریع و مطلوب دهد و شرایط سیستم قدرت را به حالت مطلوب اولیه باز گرداند، این مکانیزم کنترلی همان سیستم کنترل اتوماتیک تولید میباشد.
اهداف کلی سیستم کنترل اتوماتیک تولید
پروژه متلب اهداف اولیه کنترل اتوماتیک تولید، تنظیم فرکانس سیستم در مقدار مشخص اسمی و حفظ تبادل توان بین نواحی کنترلی در مقدار برنامهریزی شده از طریق تنظیم خروجی ژنراتورهای انتخابی است.
بخشهای مختلف سیستم کنترل اتوماتیک تولید
برای رسیدن به اهداف ذکر شده سه حلقه کاری برای سیستم کنترل اتوماتیک در نظر گرفته میشود که عبارتست از کنترل اولیه، کنترل ثانویه و کنترل ثالثیه .
کنترل اولیه
پروژه متلب سیستم کنترل اولیه وظیفه پاسخ به تغییرات بار جهت برگراندن فرکانس کار سیستم به مقدار مطلوب را بر عهده دارد و این عمل توسط گاورنر انجام میشود بدین صورت که با بروز یک تغییر در بار سیستم سرعت چرخش ژنراتور به مقداری که توسط ثابت لختی آن مشخص میشود، تغییر میکند و گاورنر که از سرعت چرخش ژنراتور فیدبک میگیرد و آن را با یک سر عت مرجع میسنجد این تغییر سرعت را دریافت میکند و با فرمان دادن به شیر بخار، توان ورودی به توربین را برای رسیدن به سرعت مطلوب اصلاح میکند.
کنترل دوم
سیستم کنترل اولیه با استفاده از گاورنرهای با مشخصه شیب افتی به تغییرات بار به صورت مطلوب پاسخ میدهد ولی فرکانس کار سیستم رادر حدود مقدار نامی میرساند و همیشه خطای حالت ماندگار فرکانس بسته به مشخصه شیب گاورنر وجود خواهد داشت . برای از بین بردن این خطای حالت ماندگار باید از سیستم کنترل تکمیلی استفاده کرد که مجهز به یک انتگرال گیر باشد تا شرط صفر شدن خطای حالت ماندگار را برای ما ارضا کند، این کنترل تکمیلی همان سیستم کنترل ثانویهاست.
پس سیستم کنترل ثانویه با دو هدف اصلی طراحی گردیدهاست :
- ۱. باز گرداندن فرکانس کار سیستم به مقدار قبل از بروز اغتشاش (صفر کردن خطای حالت ماندگار فرکانس )
- ۲ . باز گرداندن میزان فلوی ارتباطی نواحی مختلف سیستم به مقدار برنامهریزی شده
کنترل سوم
پروژه متلب این حلقه از سیستم کنترل اتوماتیک با انجام مطالعات پخش بار اقتصادی به صورت استاتیکی به مباحث اقتصادی میپردازد. کنترل ثالثیه پس از عملکرد کنترل ثانویه توسط بهره برداران سیستم فعال میگردد. در شرایطی که یک حادثه باعث ایجاد یک تغییر ماندگار در مقدار ذخیره کنترل ثانویه شود سهم دائمی ذخیره کنترل ثانویه بعنوان انحراف کنترل ثالثیه در نظر گرفته میشود. هر بلوک یا ناحیه کنترلی باید ذخیره کنترل ثالثیه کافی برای جایگزینی کنترل ثانویه در زمان کوتاه بعد از هراختلال را در دسترس داشته باشد. در صورتی که واحد تولیدی بزرگی از مدار خارج شود و توسط کنترل ثانویه پوشش داده نشود لازم است که ذخیره کنترل ثالثیه این کسری را جبران کند. کنترل ثالثیه، هرگونه تغییر خودکار یا دستی بر نقطه کار ژنراتورها را شامل میشود و دارای اهداف ذیل میباشد:
- تضمین تأمین به موقع ذخیره کافی کنترل ثانویه
- توزیع مناسب توان کنترل ثانویه بر روی ژنراتورهای مختلف با توجه به ملاحظات اقتصادی
کنترل خودکار یا کنترل اتوماتیک (به انگلیسی: Automatic control) علمی است که هدف آن کنترل یک یا چند متغیر دینامیکی، الکتریکی، حرارتی، سیالاتی، شیمیایی، اقتصادی و … است.
پروژه متلب کنترل خودکار یا اتوماتیک نقشی حیاتی در پیشرفت علوم داشتهاست. این نوع کنترل علاوه بر نقش عمده اش در سیستمهای فضاپیما، هدایت موشک، روباتها و نظایر آن بخش جدایی ناپذیر و مهم فرایندهای تولیدی وصنعتی امروز است. کنترل خودکار در کنترل عددی ماشینابزارها، طراحی هواپیماهای بی سرنشین و طراحی خودروهای سبک و سنگین، در صنعت خودروسازی بسیار ضروری است. بالاخره در عملیاتی همچون کنترل فشار، دما، رطوبت، غلظت، و حرکت سیالات، کنترل خودکار بسیار مورد توجه است.
مباحث اصلی کنترل خودکار
- مقدمه ای بر سیستمهای کنترل
- مدلسازی سیستمهای دینامیکی و حرارتی و سیالاتی
- تحلیل پاسخهای گذرا و ماندگار
- تحلیل مکان هندسی ریشهها
- طراحی سیستمهای کنترل به روش مکان هندسی ریشهها
- تحلیل پاسخ فرکانس
- طراحی سیستمهای کنترل به روش پاسخ فرکانس
- سیستمهای کنترل با دو درجه آزادی
- تحلیل سیستمهای کنترل در فضای حالت
- طراحی سیستمهای کنترل در فضای حالت
انواع سیستمهای کنترل
- سیستمهای هیدرولیکی و نیوماتیکی
- سیستمهای ترمودینامیکی و حرارتی
- سیستمهای ارتعاشی و دینامیکی
- سیستمهای الکتریکی و الکترونیکی
- سیستمهای فرایندی و شیمیایی
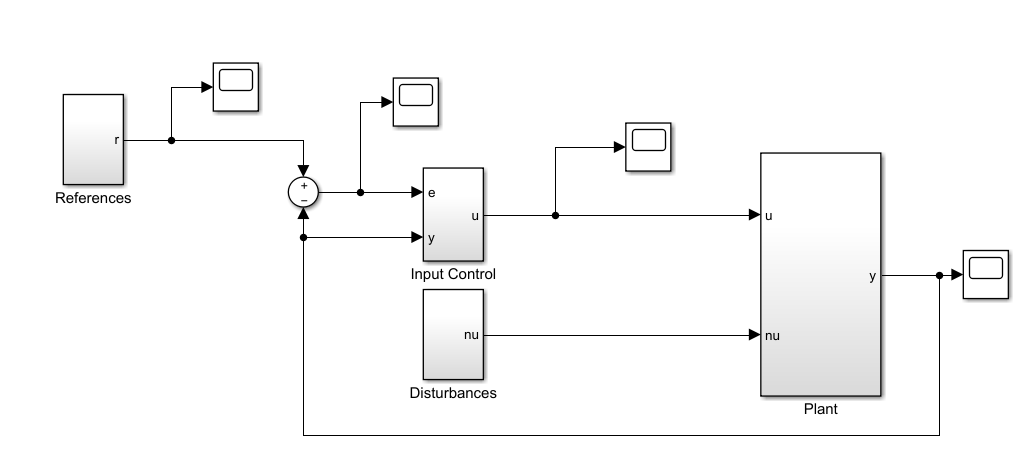
کنترل مدار-باز و کنترل مدار بسته (پسخور یا فیدبک)
به صورت پایه ای دو گونه اصلی کنترل وجود دارد: کنترل مدار-باز و کنترل مداربسته پسخور (فیدبک)
پروژه متلبدر کنترل مدار-باز عمل کنترلی مستقل از “خروجی فرآیند” است. یک مثال خوب آن کنترل دیگ آب گرم در سیستم گرمایش مرکزی است که توسط یک تایمر کنترل میشود، که در آن گرما به صورت ثابت، بدون توجه به دمای ساختمان، برای یک زمان خاص اعمال میشود. (عمل کنترلی روشن و خاموش کردن دیگ است. خروجی فرایند دمای ساختمان است)
پروژه متلب در کنترل مدار-بسته، عمل کنترلی به خروجی فرایند وابسته است. در مثال دیگ آب گرم، در این حالت کنترلی یک ترموستات در هر اتاق نصب میشود تا دمای اتاقها را مانیتور کرده و در نتبجه یک سیگنال پسخور (فیدبک) به کنترلر ارسال میکند تا از تأمین دمای اتاقها اطمینان حاصل شود.
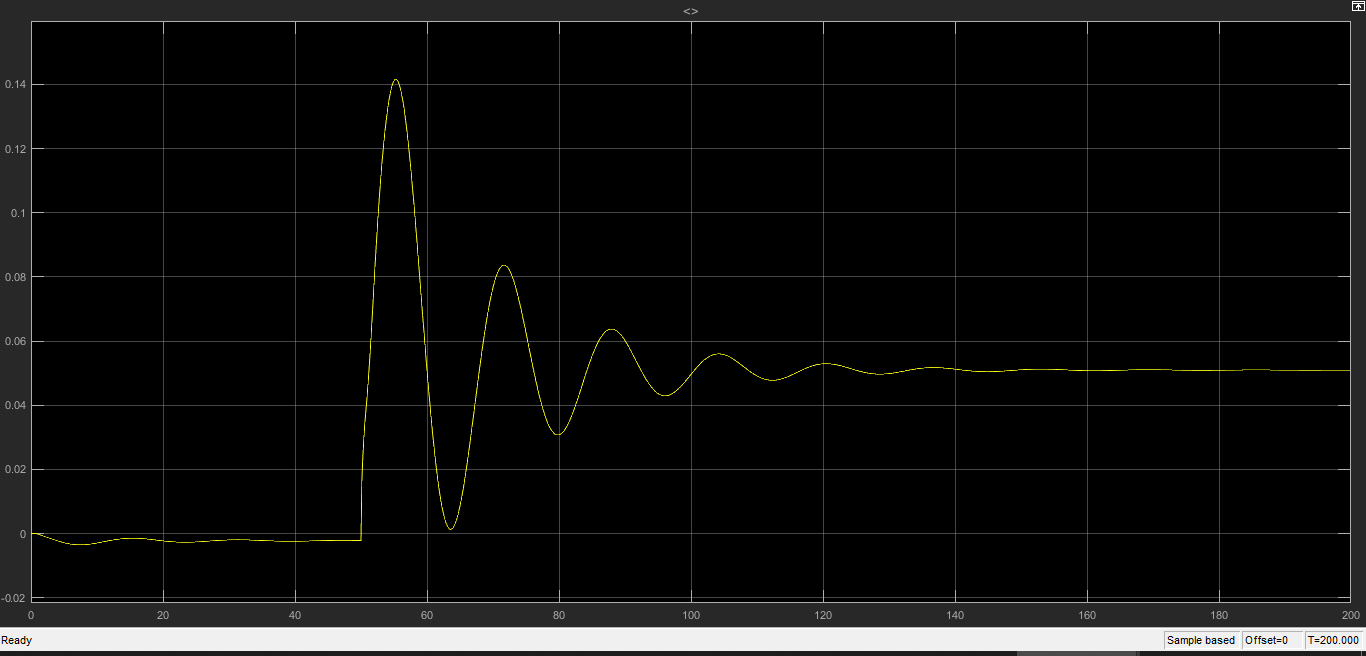
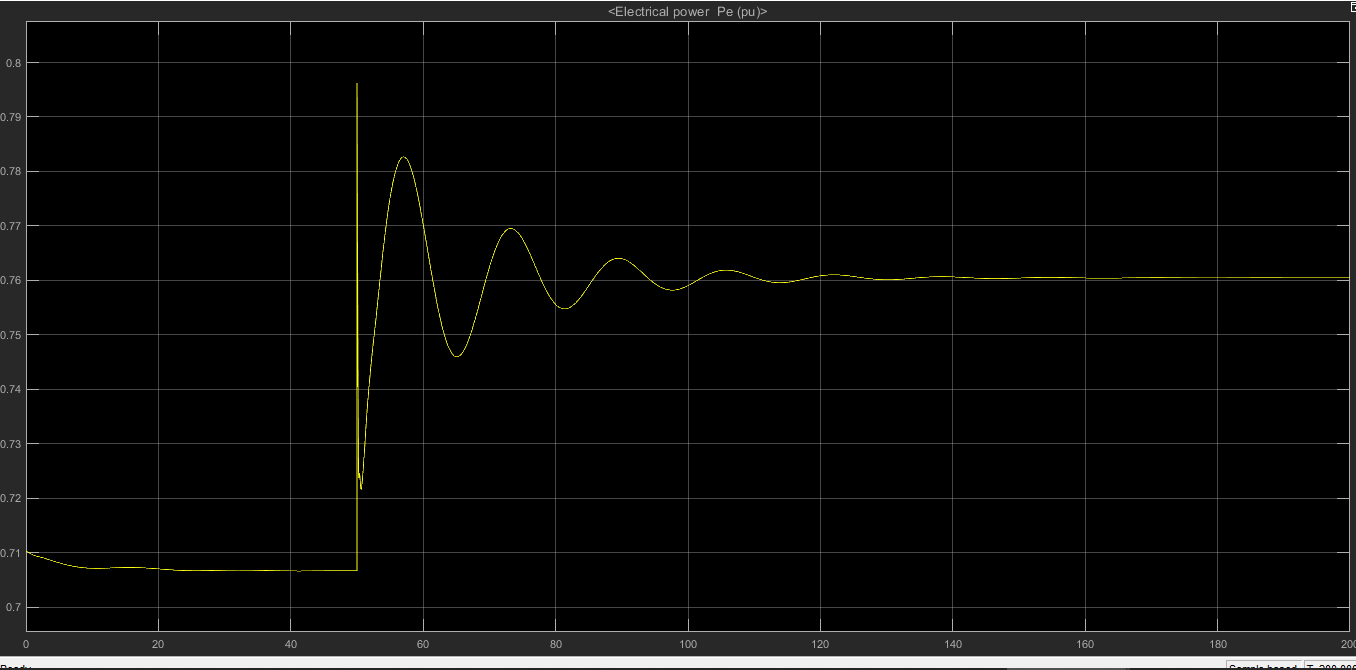
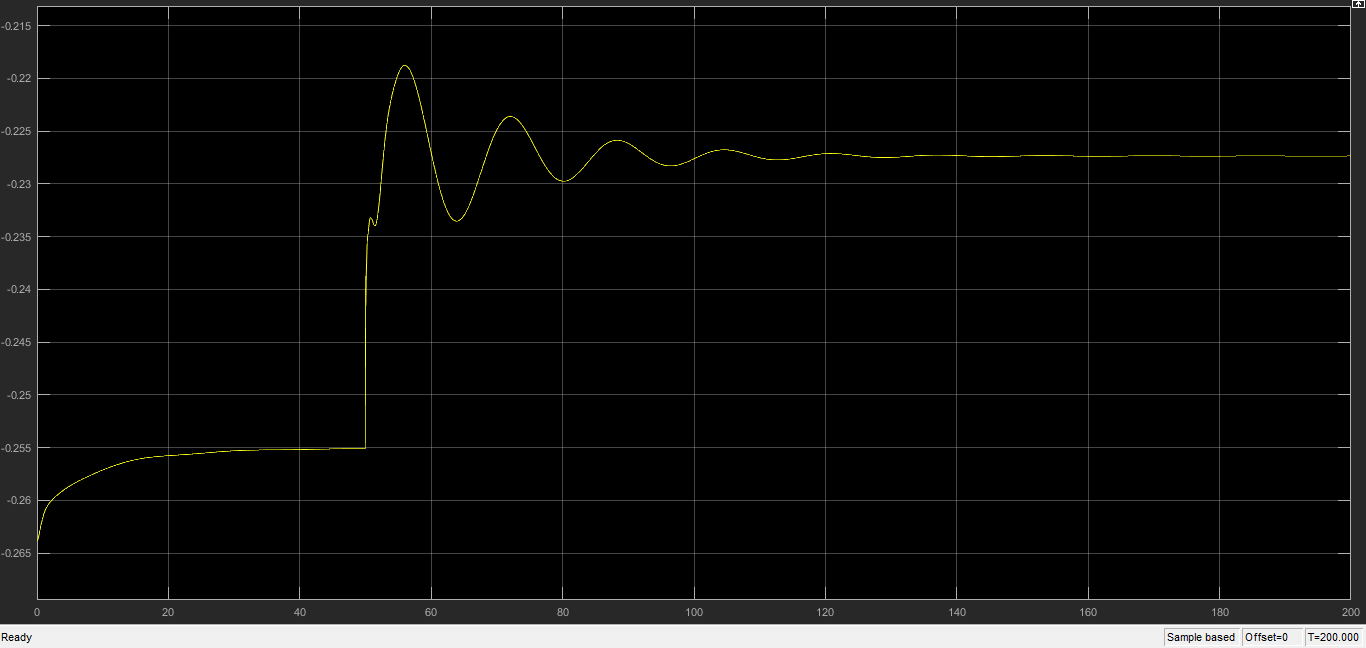
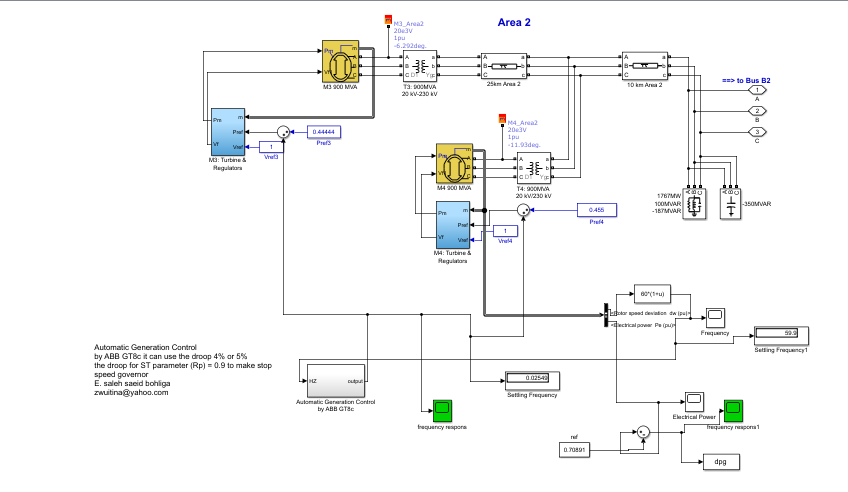
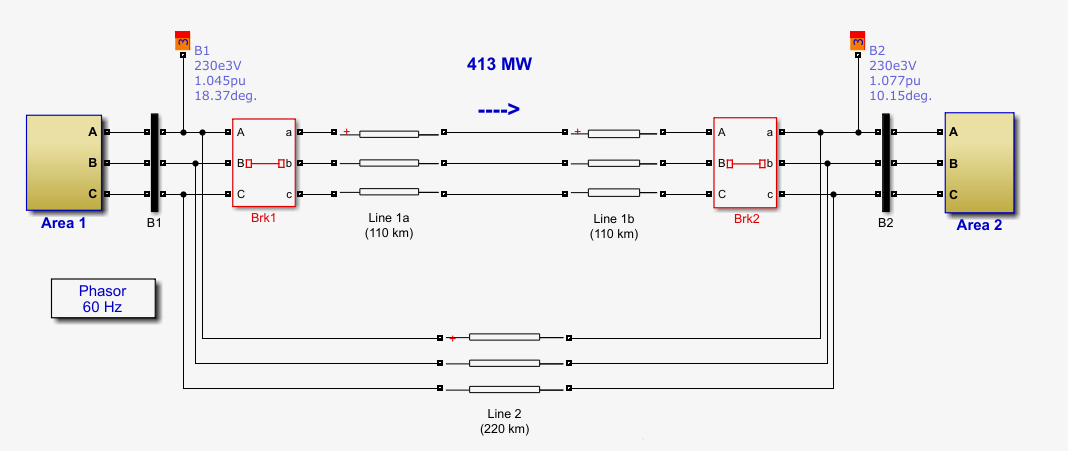
خروجی متلب :
لطفاً براي ارسال دیدگاه، ابتدا وارد حساب كاربري خود بشويد