گزارش پروژه طراحی کنترلر pid بر روی سیستم پاندول معکوس همراه گزارش فارسی
گزارش پروژه طراحی کنترلر pid بر روی سیستم پاندول معکوس همراه گزارش فارسی :سورس کد متلب
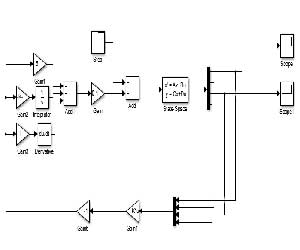
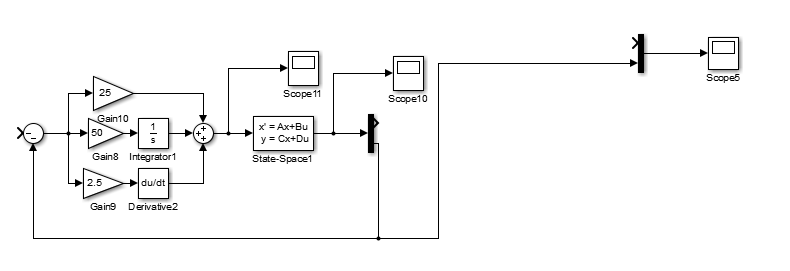
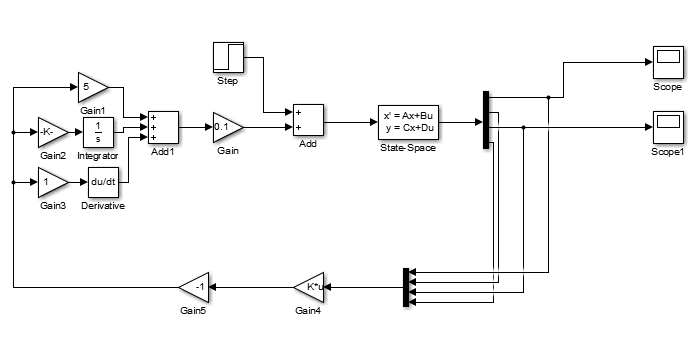
سورس کد متلب:اساس ساختمان فیزیکی پاندول معکوس جرمی است که توسط میله ای فلزی سبکی به یک تکیه گاه دارای حرکت انتقالی دریک جهت متصل شده است و این جرم حول محول اتصال دارای یک درجه آزادی دورانی می باشد به این ترتیب سیستم دو درجه آزادی می باشد دراین مقاله درمورد کنترل مدلسازی ریاضی و انتخاب متغیرهای حالت و بدست آوردن معادلات برای دستگاهی که برای این پروژه ساخته شده است می پردازد درادامه با استفاده از فضای حالت رویت پذیری و کنترل پذیری سیستم و عوامل موثر برسیستم بررسی می شود و با استفاده از شبیه سازی نرم افزار مطلب درستی معادلات بدست آمده بررسی می شود درانتها درمورد سیستم کنترل LQR که برای کنترل این دستگاه استفاده شده است بحث می شود.
سورس کد متلب:اساس ساختمان فیزیکی پاندول معکوس جرمی است که توسط میله ای فلزی سبکی به یک تکیه گاه دارای حرکت انتقالی دریک جهت متصل شده است و این جرم حول محول اتصال دارای یک درجه آزادی دورانی می باشد به این ترتیب سیستم دو درجه آزادی می باشد دراین مقاله درمورد کنترل مدلسازی ریاضی و انتخاب متغیرهای حالت و بدست آوردن معادلات برای دستگاهی که برای این پروژه ساخته شده است می پردازد درادامه با استفاده از فضای حالت رویت پذیری و کنترل پذیری سیستم و عوامل موثر برسیستم بررسی می شود
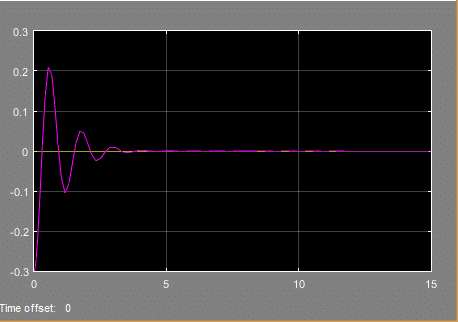
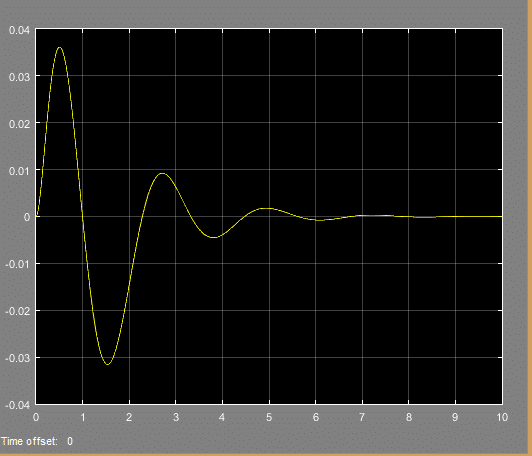
خروجی متلب:

لطفاً براي ارسال دیدگاه، ابتدا وارد حساب كاربري خود بشويد