کنترل دمای اتاق با استفاده از کنترلر pid در متلب
کنترل دمای اتاق با استفاده از کنترلر pid در متلب :پروژه متلب
پروژه متلب : اجزای کنترل دماسنج :
۱- متغییر کنترل شونده: پارامتری برای اندازه گیری وسنجش کنترل می شود. مثال(دمای حباب خشک هوای خروجی ازکوبل متغیر کنترل شونده.)
پروژه متلب ۲-سنسور: شرایط متغیرکنترل شونده را سنجیده وسیدنال ورودی را به کنترل کننده ارسال می کند
مثال:(دما سنج)
کنترلر: شرایط سنجش شده ی متغیر تحدد کنترل با شرایط خواسته شده مقا یسه کرد و سیکنال تصحیح کننده را به صورت خروجی به دستگاه تحدد کنترل ارسال می کند .
۴- دستگاه تحت فشار: دستگاهی که در برابر سیکنال خروجی از کنترل کننده عکس العمل نشان می دهدوتغیراتی را در کنترل شونده ایجاد می کند . مثال :(شیر برقی)
۵- عامل کنترل شونده: با را متر تحد کنترل
اهداف کنترل محیطی hvac:
پروژه متلب دما: بین ۶۰و۶۸ درجه فا رنهایت (۲۰ درجه سانتی گراد)وهفتاد بنج درجه فار نهایت (۲۵ درجه سانتی گراد) دمای اسایش است که کمتر از این مقدار احساس گرما برای انسان به وجود می اید.
رطوبت: روطوبت مناسب برای زندگی بین ۲۰% و۶۰%rh است که کمتر از ۲۰ درجه احساس خشکی هوا به وجود می آ ید که تاثیر منفی بر روی سلامتی انسان و کامپیوتر ها وپر ینترها و۰۰۰ دارد وبیشتر از ۶۰% انسان احساس خفگی می کند و با عث افزایش رشد کپک ها و قارچ های مزاهم می شود.
فشار : در یک ساختمان داشتن فشار مثبت کمک می کند هوا تمیز در داخل ساختمان حفظ شود و خروج هوای خنک وفاقد روطو بت در فصل تا بستان جدار ساختمان را پروژه متلب خشک نگه می دارد اما فشار های شدیدن مثبت باز و بسته کردن درها را مشکل ساخته و موجب میشود تا جریان هوا با سرعت و صدای زیاد از کناره ی بنجره ها و درها حرکت کند ضمنا کنترل نما با اشکالات فراوانی صورت می گیرد چون جریان هوای رفت در مسیر خود به سمت فضا های مسکونی با مانه برخورد می کند وفصل زمستان حتی فشار مثبت ضعیف هم هوای مرطوب دا خل به نقات داخلی جدار ما ختمان هدایت می کند که این رطوبت در سطوح سرد دیواره ی داخلی چکانیده شده و سرعت متلاشی شدن سازه را افزایش می دهد شرایط ایده حال زمانی روی می دهد که فشار داخل ساختمان برابر فشار خارجی بوده و یا در فصل سرد به مقدار نا چیزی از آن کمتر (به حد اقل رساندن بیرون رفتن هوا) و در فصل گرما به مقدار ناچیزی از ان بیشتر (به حد اقل رساندن نفوذ هوا ) باشد.
سیستمهای عامل ساختمان:
پروژه متلب سیستم کامپیوتری الگو برداری از برورتکهای سنتی سیستمهای خود کار سازی ساختمان bac مانند Bacnet یا lonwork در حال تبدیل شدن به جای گزینی ارزشمند می باشد به کار گیری سیستم کامبیوتر لینوکس را برای توسعه ی کاربرد های جدید تنها در صفحه نمایش گر های کامبیوتر بلکه در داخل دیوارها صفه سقف های ساختمان ها ایجاد نموده است لینوکس در صنعت تکنولو لزی it حدود ۴۰% سهم بازار سیستمهای عامل سازمانی در مقابل سیستم سندی مدروسافت ویندوز دز اختیار دارد دلایل محدود یت لینکوس سادگی – بایداری – مقیاس بذیری ,وقابلیت توسعه واز همه مهمتر رایگان بودن ان است ابتکاری که اخیرا طبق عمل عنوان coba یا (خود کار سازی متصل وباز ساختمان )معرفی شده سیستم عامل مبنای لینوکس است که به منظور مدیرت راه بری و کنترل در ساختمان نسب می گردد cobaدر حال حاضر توسط کنسر سیوی ازشرکت مختصص در این تکنولولزی به عنوان سیستم عامل برتر ساختمان یا استفاده از ocgوGava وفرم نرم افزار های مبتنی بر معماری کینوکس در حال توسعه است بیشگام این شرکت ها شرکت معروف نروزی یعنی نوکیا است و سیار شرکت های دست اندر توسعه این تکنولولزی می توان بهelisa اشاره نمود اولین ویرایش تجاری cobaدر تابستان سال ۲۰۰۲میلادی ارائه شد .
کنترل pid :
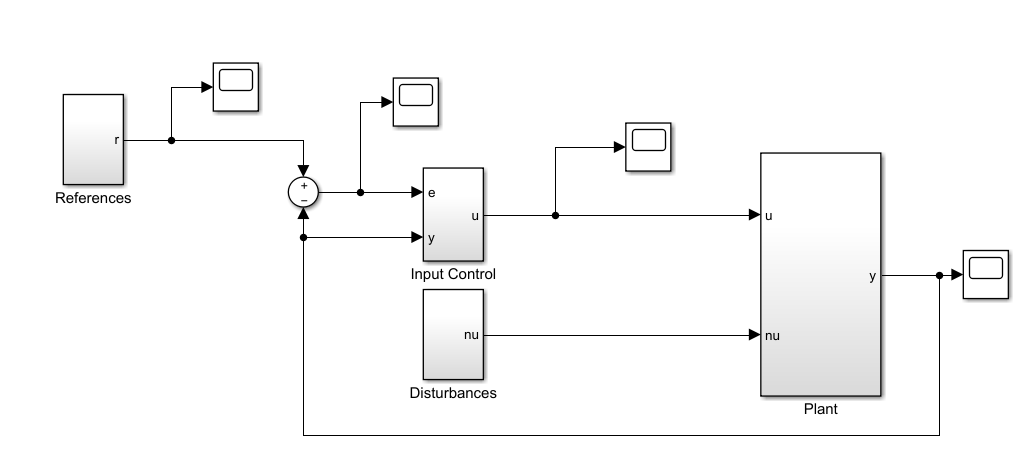
پروژه متلب کنترلکننده پیآیدی (به انگلیسی: proportional–integral–derivative controller (PID controller)) از رایجترین نمونههای الگوریتم کنترل بازخوردی است که در بسیاری از فرایندهای کنترلی نظیر کنترل سرعت موتور DC، کنترل فشار، کنترل دما و… کاربرد دارد. کنترلکننده PID مقدار «خطا» بین خروجی فرایند و مقدار ورودی مطلوب (setpoint) محاسبه میکند. هدف کنترلکننده، به حداقل رساندن خطا با تنظیم ورودیهای کنترل فرایند است.
عملکرد

بلوک دیاگرام یک کنترلر PID
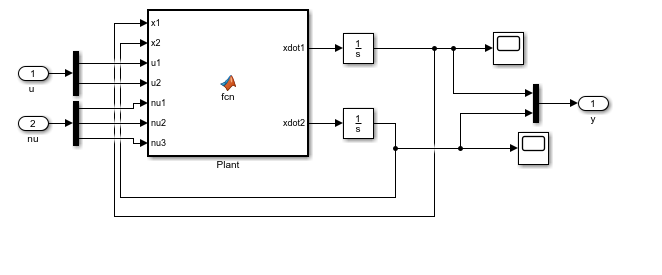
پروژه متلب PID از سه قسمت مجزا به نامهای Proportional (تناسبی)،Integral (انتگرالگیر) و Derivative (مشتقگیر) تشکیل شده که هر کدام از آنها سیگنال خطا را به عنوان ورودی گرفته و عملیاتی را روی ان انجام میدهند و در نهایت خروجی شان با هم جمع میشود. خروجی این مجموعه که همان خروجی کنترلکننده PID است برای اصلاح خطا (error) به سیستم فرستاده میشود.
فرمول استاندارد PID به فرم زیر است:
- {\displaystyle \mathrm {Output(t)} =K_{p}\left(\,{e(t)}+{\frac {1}{T_{i}}}\int _{0}^{t}{e(\tau )}\,{d\tau }+T_{d}{\frac {de}{dt}}\right)}

بنابراین تابع تبدیل یک کنترلکننده PID به صورت زیر درمیآید:
{\displaystyle G_{c}=K_{p}+{\frac {K_{i}}{s}}+K_{d}s}

پروژه متلب در بسیاری از کنترلکنندهها به علت حساسیت عبارتِ مشتق نسبت به نویز و دشواری اجرا، از آن صرف نظر و کنترل را به صورت PI پیادهسازی میکنند. سیگنال {\displaystyle u(t)} (خروجی PID) بر اساس نسبتی از خطای کنونی سیستم (عملکرد حاضر)، به اضافه مجموع خطاهای سیستم (رفتار گذشته)، به اضافه مشتق خطای کنونی (تخمین خطی رفتار آینده) محاسبه میشود و برای اصلاح خطا به سیستم اعمال میگردد. ضرایب {\displaystyle K}، {\displaystyle T_{i}} و {\displaystyle T_{d}} نیز میتوانند با روشهای شناخته شدهای مانند تابع انتقال به صورت بهینه محاسبه شوند، اگرچه در کاربردهای عملی، بهطور پروژه متلب رضایت بخش میتوانند با آزمون و خطا و مشاهده رفتار سیستم بهطور تقریبی تعیین گردند.




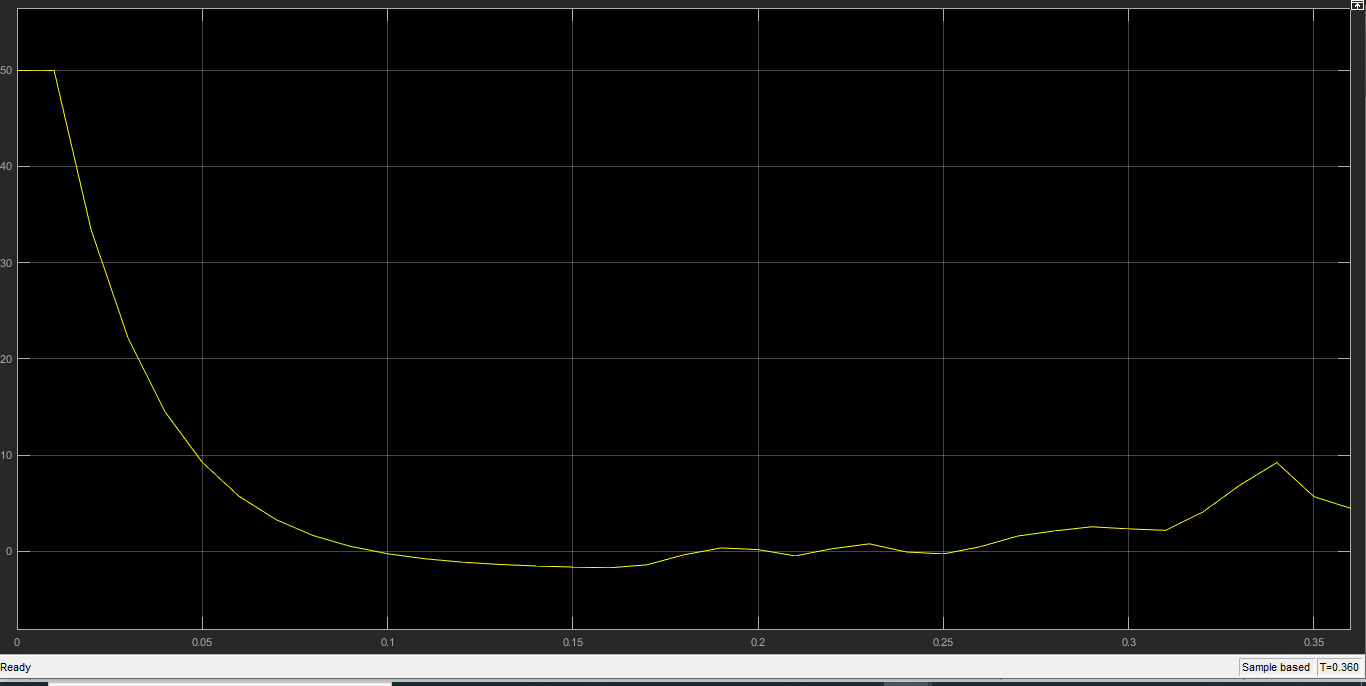
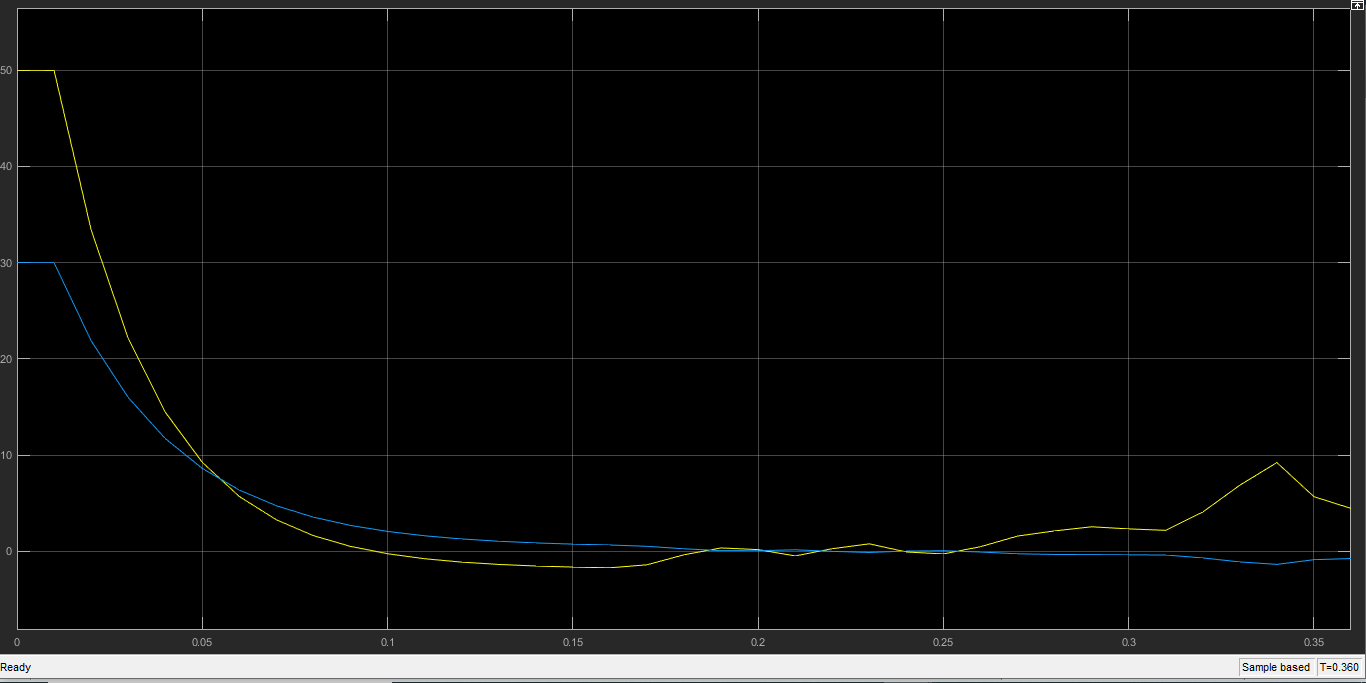
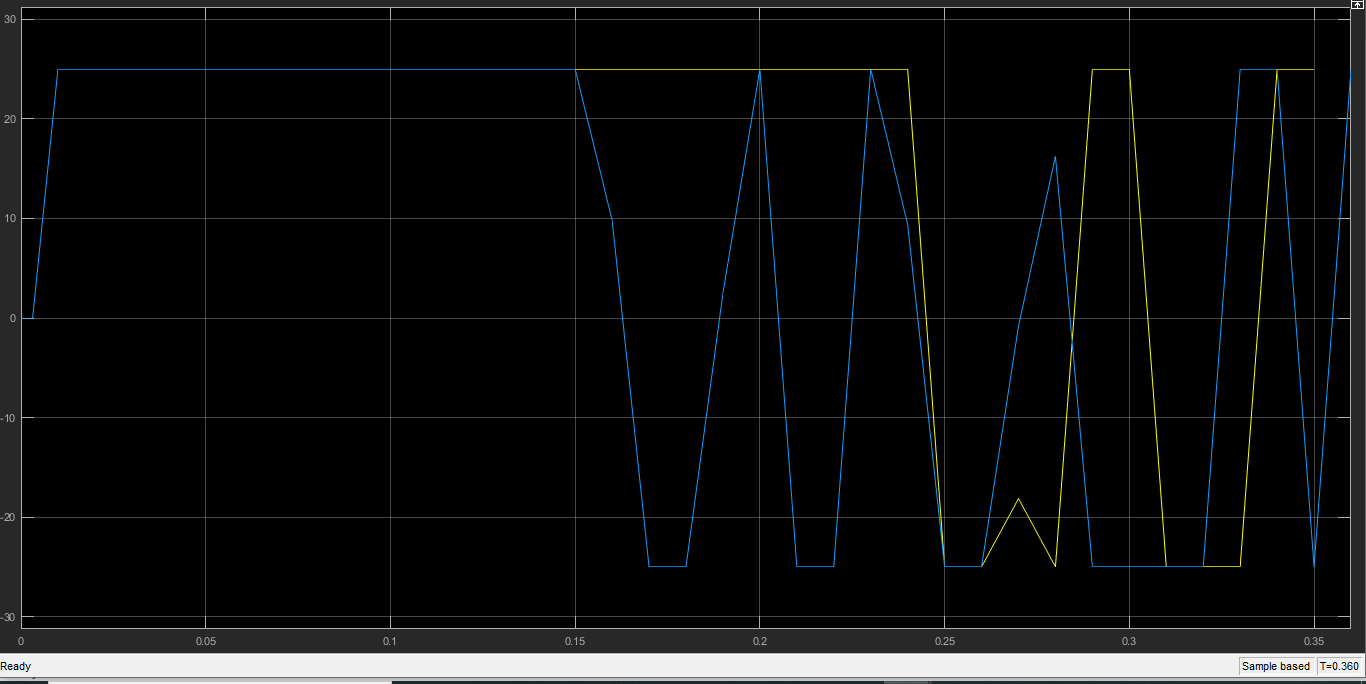
خروجی متلب :
لطفاً براي ارسال دیدگاه، ابتدا وارد حساب كاربري خود بشويد