
تشخیص محدودیت سرعت در جاده با استفاده از پردازش تصویر
تشخیص محدودیت سرعت در جاده (تابلو های محدودیت سرعت) با استفاده از پردازش تصویر و استخراج ویژگی: آموزش متلب
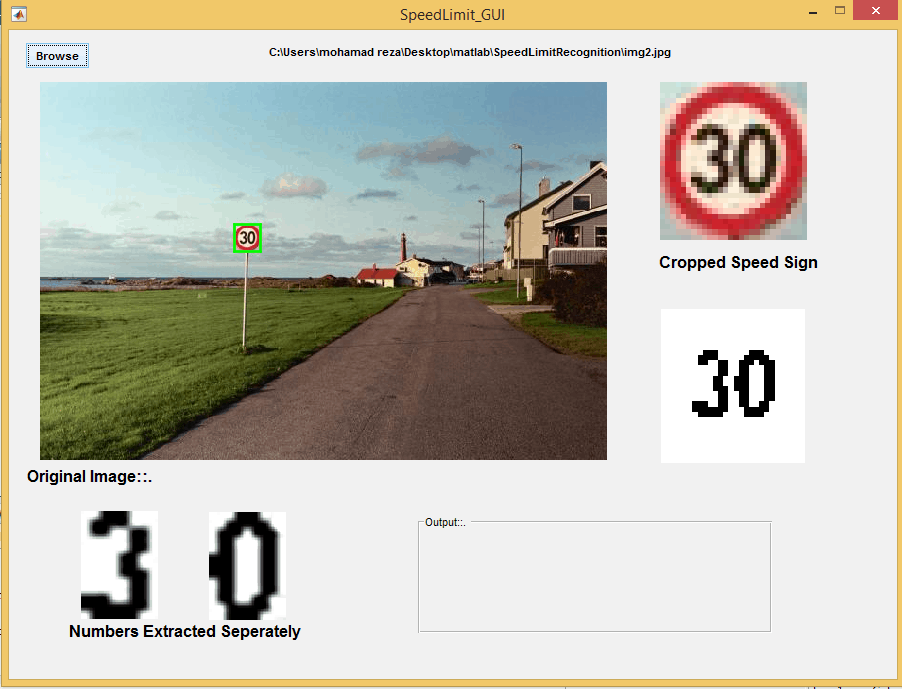
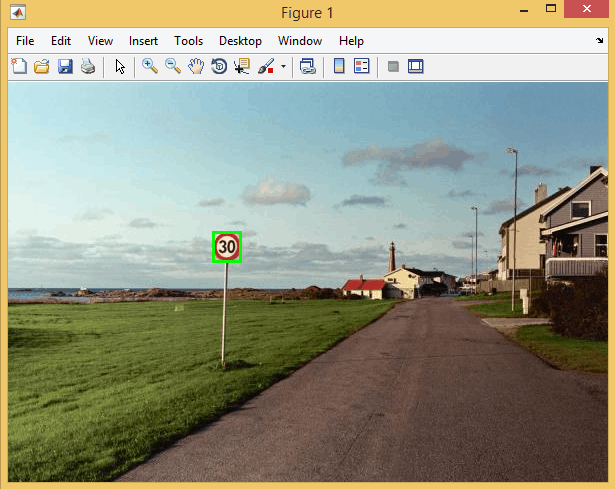
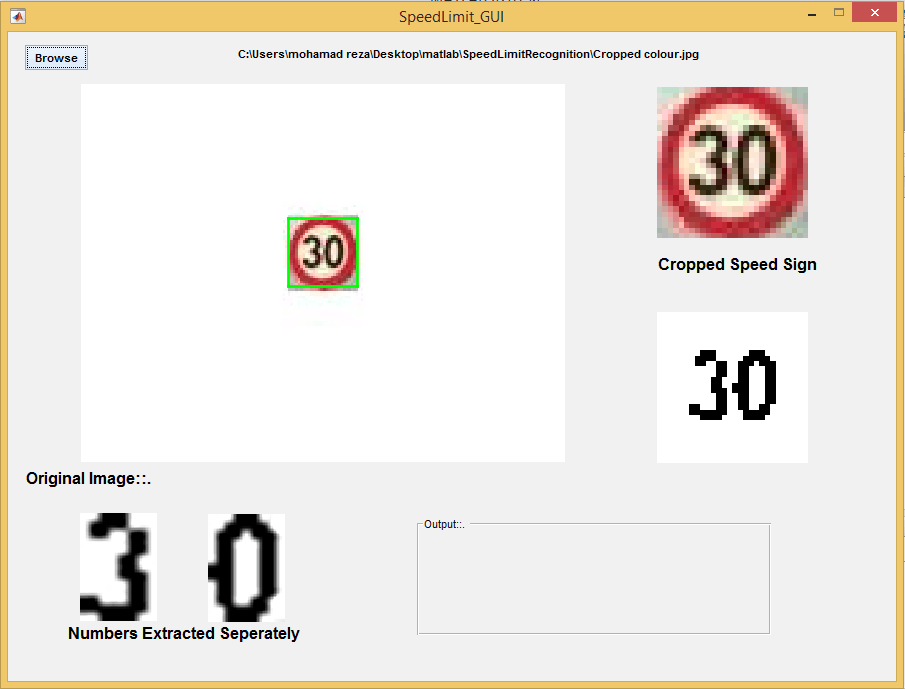
آموزش متلب : در این پروژه ابتدا شکل بصورت زیر وارد متلب می گردد.
سپس با استفاده از دسته بندی داده و استخراج ویژگی تصویر شکل علامت راهنمایی رانندگی انتخاب و جدا می شود.
سپس در این شکل لبه یابی انجام می گیرد.
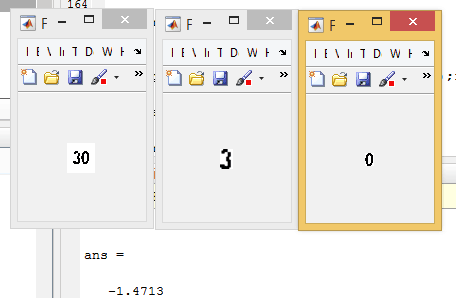
ویژگی تصویر که عدد ان می باشد از تصویر استخراج میگردد:
سپس با کمک دسته بندی داده عدد از تصویر استخراج و به نمایش در می آید:
آموزش متلب : در این پروژه از تکنیک های پردازش تصویر ،استخراج ویژگی با گابور و نیز دسته بندی داده استفاده شده است.
پردازش تصویر ،استخراج ویژگی ،گابور ، دسته بندی داده،محدودیت سرعت،متلب،علایم راهنمایی رانندگی
– کنترل ترافیک بزرگراه : کنترل روی جریان مسیر های ورودی و مسیرهای خروجی با هدف کنترل ترافیـک روان در مسیر اصلی . (expressway control)
۵- کنترل عابران پیاده : کنترل عبور پیاده از خیابان با هدف تامین امنیت و کاهش زمان انتظـار.( pedestrian
(control
اصولا سه نوع روش کنترلی برای تقاطعها مورد استفاده میباشد:
١- کنترل زمان ثابت (fixed-time) :در این روش کنترلی ، زمان تغییر چراغها از پیش تعیین شده و هیچگونه انعطافی در برابر شرایط ایجاد شده مانند وقوع تصادفات ، ایجاد شـرایط خـاص مثـل تعطیلـی مـدارس ، عبـور آمبولانس و… ندارد.
٢- کنترل از پیش زمان بندی شده (pre-time control) : در این نوع کنترل بر اساس الگوهای متعددی که از وضعیت یک خیابان به دست آمده است ، زمانبندی چراغها صورت میپذیرد. مثلا در هر ساعت خاصی از شبانه روز مانند ساعات تعطیلی مدارس یا ساعات پیک تردد، مدت زمان سبز وقرمز بودن چراغها به گونه ای متناسب تنظیم میشود، اما باز هم در برابر شرایط اضطراری غیر قابل انعطاف هستند.
٣- کنترل هوشمند (intelligent control) : در این نوع کنترل تغییر وضعیت چراغها کاملا به شرایط موجود و میزان درخواست بار ترافیکی بستگی دارد.
با مطرح شدن کنترل هوشمند در مهندسی کنترل و موفقیت این روشها در سیستم های عملی ، کاربرد
روشهای کنترل هوشمند درمبحث ترافیک نیز مطرح گردیده است .
به دلیل ویژگیهای خاص سیستم کنترل ترافیک شهری و از آنجا که رفتارهای پیچیده انسان از عوامـل موثر بر شرایط ترافیکی ایجاد شونده در این سیستم میباشد، کاربرد آموزش متلب :روشهای هوشمند کنترل به جای روشهای سنتی ضروری به نظر میرسد. به طور عمده مسائل اصلی در کنترل چراغ راهنمایی در یک تقاطع ایزوله توجه به کاهش تاخیر وسایل نقلیه و کاهش میزان توقفات و همچنین افزایش ظرفیت خیابان ها میباشـد. در میـان ابزار های مختلفی که برای برقراری ایمنی راه و حفظ نظام در جریان ترافیک موجود میباشد، ماننـد تابلوهـای راهنمایی ، خط کشی ها، و سایر ابزار و وسایل نصب شده در خیابانهـا، موجـود میباشـد، زمانبنـدی چراغهـای راهنمایی برای کمینه کردن تاخیر و افزایش ظرفیت تقاطع ها در منطق کنتـرل کـاربرد فراوانـی دارد. دریـک تقاطع ایزوله دو حالته که در این طرح مورد بررسی میباشد، تنها با دو فاز عملیاتی کار میشود، وقتی که چراغ در دو خیابان روبرو به هم سبز باشند، در دو خیابان مجاور قرمز میشود و برعکس . در یک کنترل هوشمند، بر اساس میزان درخواست ترافیکی در خیابان مورد کنترل ، تغییرات چراغ و رفتن به فاز دیگر، صورت میگیـرد و مدت زمان مناسب برای سبز بودن یک چراغ تعیین میشود.
با توجه به قابلیتهای متنوع روشهای هوشمند (شامل هوش مصنوعی , منطق فازی و شبکه عصبی )، به ویژه در پوشش دهی و پاسخگویی مناسب به موارد فوق ، پیشنهاد استفاده از روشهای هوشمند، جهت پوشش دهی مشکلات فعلی ، به عنوان یک راه حل جدید مطلوب خواهد بود. با توجه بـه قابلیتهـای متنـوع روشـهای هوشمند انتظار میرود که روشهای فوق در حوزه های مختلف کنترل ترافیک شامل بـرآورد وتعبیـر و پـردازش اطلاعات مختلف جمع آوری شده ، برخورد و مدل سازی مناسب پارامترها و شـرایط مـبهم موجـود در پروسـه کنترل ، پیشگویی آینده ، افزایش قدرت یادگیری سیستم و بالاخره افزایش هوشمندی سیستم ، بسیار پر کاربرد بوده و نتایج قابل قبولی را به دنبال خواهد داشت .
در این پروژه پس از شناخت و تحلیل روابط حاکم بر متغیر های ترافیکی ، درجه اشباع هـر ورودی کـه نشان دهنده نسبت میزان درخواست بار ترافیکی به میزان ظرفیت آن ورودی میباشد، به عنوان پارامتر ورودی کنترل کننده در نظر گرفته شده و با روشهای مبتنی بر بینایی ماشین اندازه گیری میشود. کنتـرل کننـده در هر مرحله نمونه برداری و در پایان زمان سیکل جاری ، وضعیت همه ورودی را ارزیابی کرده و طـول چرخـه و طول زمان سبز اختصاص داده شده به هریک از خیابانها را در مرحله بعدی تعیین میکند تـا درجـه اشـباع در همه ورودی نسبتا یکسان و در سطح مناسبی قرار بگیرد. آموزش متلب :پس از طراحی ساختار قوانین کنترل کننده براساس پارامترهای فازی ، الگوریتم آموزش مربوط به شبکه عصبی اجرا میگردد.
١-٢) پیشینه تحقیق
به طو کلی نظریه کنترل ترافیک شهری از سال ١٩۵٠ ارائه گردید. بخش عمده ای از روشهایی کـه تـا کنون ارائه شده اند براساس روشهای کلاسیک و مبتنی بر اطلاعات آماری و منحنی های به دست آمده تجربـی میباشد. در زمینه کنترل زمان ثابت در یک تقاطع ایزوله ،Webster، در سال ١٩۵٨ رابطه ای ریاضـی را بـرای کنترل بهینه چرخه ارائه داد. پس از آن روشهای کنترلی دیگری نیز بر اساس مدل بهینه سازی ریاضی توسـط
Miller در سال ١٩۶٣، Bang درسال ١٩٧۶، و Davidsson در سال ١٩٩۶، ارائه گردید[۵].
به طور همزمان ، با معرفی تئوری فازی در سال ١٩۶۵توسط دکتر زاده کـاربرد ایـن نظریـه در کنتـرل ترافیک تقاطعها آغازشد. نخستین کنترلر فازی توسط Pappis و Mamdani در سال ١٩٧۴ با کاربرد مقدماتی منطق فازی برای یک تقاطع مستقل بـا خیابانهـای یـک طرفـه ، ارائـه گردیـد[۶]. بـرای کنتـرل شـبکه ای از تقاطعهای وابسته به یکدیگر با خیابانهای دو جهته ، Chiu در سال ١٩٩٢ روشی را با کاربرد منطق فازی ارائـه داد[١١]. همچنین روشهایی نیز بر اساس نظریه فازی برای کنترل حجم یک معبر، کنترل تقاطع ها با در نظـر گرفتن حرکات گردشی با اهداف مختلف کنترلی ارائه گردیده است . به طور رسمی پروژه ۱FUSICO از سـال
١٩٩۶ در دانشگاه Helsinki برای توسعه روشهای کنترل فازی چراغهای یـک تقـاطع آغـاز شـده اسـت کـه تاکنون نیز این تحقیقات ادامه دارد.
از جمله سیستم های کنترلی طراحی شده میتوان به سیستم ۲UTCS اشاره نمود که از حدود سـالهای
١٩٧٠ رواج یافته و تا به امروز با آنکه تغییرات و پیشرفتهای وسیعی روی آن صورت گرفتـه ، بـاز هـم مبنـای بسیاری از سیستم های کنترل زمان بندی شده میباشد .این سیستم یک برنامه زمان بنـدی خـارج از خـط بـر اساس میانگین شرایط ترافیکی برای یک دوره زمانی خاص از طول روز در کامپیوتر مرکزی ارائـه میدهـد کـه معمولا بر اساس به حداقل رساندن شاخص بی نظمی که نشان دهنده میزان تاخیر وتوقف و یا ماکزیمم کردن ظرفیت باند میباشد، عمـل میکنـد. UTCS مجموعـه ای از الگـوریتم هـایی میباشـد کـه تحـت پارامترهـای آموزش متلب :۳FHWA استاندارد شده است و امروزه با کاربرد مدلسازی میکروسکوپی ، استانداردهای دیگـری نیـز عملکـرد این سیستم را توصیف میکنند.
با ایجاد قابلیت کاربرد میکروپروسسورها که استفاده از آنها نیـز سـاده و کـم هزینـه میباشـد، چنـدین سیستم کنترل ترافیک روی خط ١ از اواخر دهه ٧٠ و اوایل دهه ٨٠ در جهت پاسخگویی به تغییرات ایجاد شده برای افزایش عملکرد بهینه سازی ارائه گردیده است . از جمله این سیستم ها میتوان به سیـستم ۲SCATS کـه در استرالیا وسیستم ۳SCOOT که در انگلیس ارائه شده اند اشاره نمود[٩، ١٠]. در مجموع میتـوان گفـت کـه این دو سیستم در جهت افزایش بهینه سازی پارامترهایی همچون چرخه ۴، تسهیم ۵، آفست ۶ عمل میکننـد. در کشور ما حدودا از سال ١٣٧٧ طرح کاربرد نرم افزار SCATS به مرحله اجرا در آمد و هم اکنـون حـدود ٣٢٠ تقاطع شهر تهران به این سیستم مجهز شده اند. سیستم های دیگری نیز در سالهای اخیر مورد توجـه کـاربران قرار گرفته است که نمونه هایی از این سیستم ها عبارتنـد از: سیـستم ۷PLIDENT، سیـستم EQUISAT و
۸ سیستم ۹FLEXIPROG. کاربرد شبکه های عصبی به عنـوان یـک روش هوشـمند در سیـستم هـای کنتـرل ترافیک در سالهای اخیر اهمیت ویژه ای یافته اسـت . سیـستم ۱۰S-TRAC توسـط Spall در سـال ١٩٩٧ کـه نمونه ای از سیستم های مبتنی بر شبکه عصبی می باشد، ارائه گردید. در سال ١٩٩٢، Dongling الگوریتمی بـه منظور کاربرد همزمان شبکه های عصبی و سیستم های فازی برای بهبود استنتاجات فازی در کنتـرل ترافیـک ارائه داد. همچنین الگوریتم ۱۱FDP نیز برای اصلاح سرعت محاسبات با ترکیب روشهای فازی وعصبی در سال
آموزش متلب :١٩٩٨ توسط j.j.Henry ارائه شده است که کاربرد های فراوانی دارد. Liu.Zhiyong در سال ٢٠٠٣ یـک نـوع روش کنترلی پیشگویی کننده با استفاده از شبکه های عصبی برای کنترل چراغ در یـک شـبکه شـهری ارائـه داد.وی همچنین در سال ٢٠٠۵ یک نوع روش کنترلی بر اساس شبکه های عصبی هاپفیلد و مبتنی بر تئوری آشوب ١٢ برای کنترل یک تقاطع ایزوله پیـشنهاد داد. Guojiang نیـز در سـال ٢٠٠۴ مطالعـاتی را در زمینـه کاربرد سیستم های نرو- فازی در یک شبکه ترافیکی شامل چندین تقاطع انجام داد[١٢، ١١].
به طور کلی سیستم های عصبی به شکلهای مختلفی در کنترل ترافیک به کار گرفته شده اند. در برخی موارد شبکه عصبی به تنهایی مدلسازی ، آموزش و کنترل سیستم ترافیکی مورد نظر را انجام میدهد. همچنین ممکن است شبکه عصبی بر مبنای سایر روشهای کنترلی به کار رود، ماننـد بـه کـارگیری شـبکه عـصبی بـه منظور اصلاح وبهبود تصمیمات کنترلر فازی ترافیک .در برخی موارد نیز برای کنترل ترافیـک ، شـبکه عـصبی میتواندبا سایر روشهای کنترلی مانند کنترل فازی ، کنترل پیشبین و…ترکیب و قابلیتهای آنها را بهبود بخشد.
) روش کار و تحقیق
جمع آوری اطلاعات آماری به روشهای مختلف و با استفاده از انواع حسگرها صورت میپذیرد که برخی
از آنها به شرح زیر میباشد[٢]:
١-حسگرهای مکانیکی مانند آشکار سازهای هیدرولیکی یا پیزوالکتریکی .
٢-آشکارسازهای آلتراسونیک و حسگرهای مادون قرمز که با ارسال امواج به سطح خیابان و مقایـسه اخـتلاف زمان بین امواج منعکس شده از سطح وسایل نقلیه و سطح خیابان ، وسیله نقلیه را تشخیص میدهد.
٣-کاربرد رادار که با استفاده از تغییرات ایجاد شده در فرکانس امواج منتشره از سطح خودروها، سرعت آنها را تشخیص میدهد.
۴-حلقه های آشکار ساز مغناطیسی و حلقه های اندوکتانس که بر اساس تشخیص تغییرات انرژی در اثر وجـود خودرو کار میکند.
۵-حسگرهای تشخیص نور مانند دوربین ویدئویی و چشم الکترونیکی .
نصب یک دوربین از نصب سایر آشکارسازها بسیار ساده تر بوده و علاوه بر آن یک دوربـین بـه تنهـایی میتوان وضعیت محدوده وسیعی را زیر نظر داشته و اطلاعات آماری دقیق تر و با جزئیات قابل درک بیـشتری را در اختیار کنترلر قرار دهد و به طور کلی یک سیستم آشکارساز مبتنی بربینـایی ، میتوانـد کنترلـی مـشابه کنترل یک انسان را فراهم نماید.
هدف از کنترل یک تقاطع ایزوله در این پایان نامه ، بهبود وضعیت ترافیکی و ایجاد روانی نسبی حرکت در تمام مسیر های منتهی به این تقاطع ، در ساعات مختلف شبانه روز میباشد. برای رسیدن به ایـن هـدف ، از حسگرهای ویدئویی برای جمع آوری اطلاعات آماری تقاطع و ازیک الگوریتم فـازی – عـصبی اسـتفاده شـده است . یکی از مهمترین پارامترهایی که در بازدهی شبکه های عصبی و به ویژه شبکه هـای عـصبی RBF نقـش مهمی را ایفا می نماید، الگوریتم یادگیری و دقت آن می باشد. شبکه های RBF یکی از انواع شبکه های عـصبی جلوسو می باشندکه در بسیاری از کاربردهای مهندسی جذابیت و کاربرد گسترده ای دارند. وجود این ویژگی را می توان در عوامل متعددی جستجو نموداز جمله اینکه شبکه های RBF می توانند تقریباً کلیه توابع عمـومی را تخمین بزنند، ساختار بسیار ساده و فشرده ای دارند و سرعت الگوریتم آموزشی آنها سـریع مـی باشـد. در ایـن پروژه و برای اولین بار یک الگوریتم آموزشی برای شبکه های عصبی RBF مبتنی بـر منطـق فـازی و ترکیـب روشهای LLS و گرادیان با حفظ کاربری آن برای کنترل یک تقاطع ایزوله ارائه مـی گـردد. روش پیـشنهادی
FHLA برای طراحی و آموزش شبکه عصبی RBF شامل دو مرحله می باشد:
١- طراحی ساختار شبکه RBF و مقداردهی اولیه به پارامترهای آن .
٢- تنظیم پارامترهای شبکه براساس الگوهای آموزشی .
اساس کار، بر استفاده از شبکه عصبی فازی RBF به همراه یک روش پیـشنهادی آمـوزش مبتنـی بـر فازی خواهد بود. در الگوریتم یادگیری FHLA پیشنهادی ، علاوه بر تعیین وزنهای ارتباطی بین لایه مخفـی و لایه خروجی ، پارامترهای لایه RBF شامل تعداد نرون ، مرکز نرون و عرض آن نیـز در طـول فراینـد آمـوزش تعیین می گردند. مقادیر اولیه پارامترها با استفاده از منطق فازی و روشـهای خوشـه یـابی فـازی و بـه کمـک تکنیک FCM بدست می آیند. در این روش تابع هزینه عدم شباهت ، محاسبه و مینـیمم مـی گـردد. از میـزان
تعلق هر الگوی ورودی به خوشه ها و فاصله الگو تا مراکز خوشه جهت محاسبه میـزان عـدم شـباهت اسـتفاده می گردد. برای تعیین مقادیر نهایی پارامترها و وزنهای ارتباطی ، از ترکیب روش LLS و گرادیان به عنوان روش بهینه سازی استفاده می شود.
یک سیستم کنترلی مبتنی بر بینایی ماشین ، شامل یک دوربین دیجیتـالی اسـت کـه بـر روی مـسیر حرکت خودروها نصب شده فیلم حاصل از آن توسط الگوریتم های پردازشی مناسـب بـرای تـشخیص خـودرو استفاده میشود و نهایتا اطلاعات آماری لازم از آن استخراج میگردد.
بنابراین با ترکیب دو ابزار قدرتمند شبکه های عـصبی و سیـستم هـای فـازی همـراه بـا یـک سیـستم آشکارساز مبتنی بر بینایی ماشینها، سیستمی طراحی خواهد شد کـه عـلاوه بـر در نظـر گـرفتن جنبـه هـای مختلف تردد شهری ، بتواند بهینه سازی الگوریتم کنترل ترافیک را نیزتضمین نماید. نتایج شبیه سازی بـر روی بانک تصاویر ترافیکی تقاطع های موجود و مقایسه کاربرد این الگوریتم با سایر روشهای کلاسیک که در کنترل تقاطع های ایزوله معمول میباشد، نشان دهنده میزان قابلیت این تکنیک می باشد.
در این پایان نامه پس از معرفی نظریه جریان کنترل ترافیک و همچنین معرفی متغیرهـای ترافیکـی و روابط حاکم بر آنها پرداخته وپروسه کنترل ترافیک از دیدگاه میکروسکوپیک و ماکروسـکوپیک و مـد لـسازی مناسب فرایندهای مختلف آماری موجود در این زمینه مورد بررسی قرار میگیرد. در بررسی پدیده ترافیـک دو دسته پارامترهای گسسته و پیوسته وجود دارند که هریک از آنهـا از توزیـع هـای احتمـالاتی مناسـب پیـروی میکنند. همچنین در این بخش برخی از روشهای مدلـسازی کلاسـیک پدیـده ترافیـک و نحـوه زمـان بنـدی چراغهای راهنمایی و اصول حاکم بر نحوه فازبندی در یک تقاطع ارائه میشود.
از آنجا که منطق فازی بهترین روش برای مدلسازی فرایندهایی است که با استدلالات انسانی سرو کـار دارد، استفاده از کنترل کننده فازی ، نوعی کنترل ترافیک انعطاف پذیر را ایجاد میکند. از این رو در این پایـان نامه ضمن معرفی شبکه های عـصبی و بـه طـور خـاص شـبکه عـصبی RBF برخـی از روشـهای آموزشـی در شبکه های عصبی معرفی و شرایط معادل بودن عملکرد سیستم های فـازی و شـبکه هـای عـصبی RBF مـورد بررسی قرار میگیرد.
پس از آشنایی مختصر با سیستم های نرو- فازی به ارائه الگوریتم پیشنهادی FHLA که برای نخستین بار جهت کنترل ترافیک تقاطع ایزوله استفاده میشود، پرداخته شده است . به این منظور مراحـل پیـاده سـازی تکنیک FCM برای مقداردهی اولیه مراکز و عرض نرونها و نحوه تعیین تعداد نرون های لایه میانی با اسـتفاده از اندیسهای اعتباری خوشـه ای بیـان شـده اسـت . همچنـین مـاتریس تقریبـی بـردار ضـرایب وزن تعیـین و بهینه سازی پارامترها و تعیین مقادیر دقیق آنها صورت میپذیرد.
از آنجا که قرار است اطلاعات لازم جهت کنترل از طریق پردازش تصاویر ویـدئویی صـورت پـذیرد، در بخشی نیز به مباحث موجود در پردازش تـصویر و شناسـایی و ردیـابی اجـسام متحـرک و بررسـی روشـهای استخراج اطلاعات آماری ترافیک از تصاویر ویدئویی پرداخته میشود.
در نهایت مدلسازی رفتار دینامیکی یک تقاطع ایزوله شهری ، صورت گرفته و سـپس کنترلـر عـصبی – فازی طراحی و به مدل شبیه سازی شده اعمال میگردد. همچنین یکی از روشهای شـمارش وسـایل نقلیـه در تصاویر ویدئویی انتخاب و برروی فیلم های تهیه شده از تقاطع موردنظر پیاده میشود و نتایج حاصـل شـده بـا آمار واقعـی مقایـسه شـده انـد.
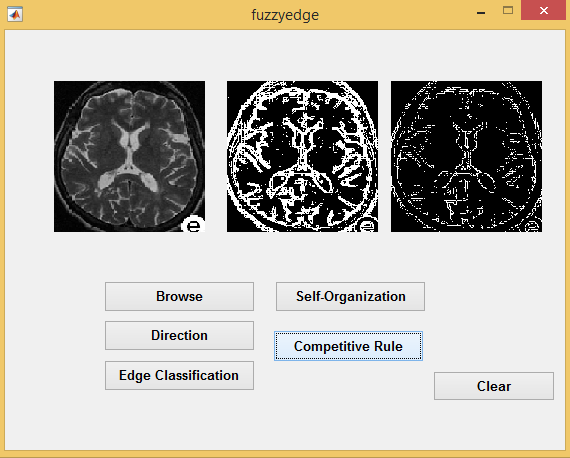
خروجی متلب :


لطفاً براي ارسال دیدگاه، ابتدا وارد حساب كاربري خود بشويد