شبیه سازی تفاوت کنترل کننده فازی و pid بر روی موتور یونیورسال با مقاله
شبیه سازی تفاوت کنترل کننده فازی و pid بر روی موتور یونیورسال:انجام پروژه متلب
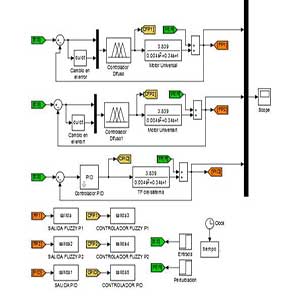
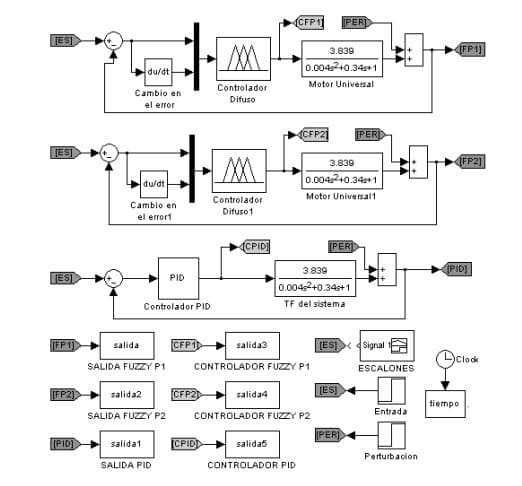
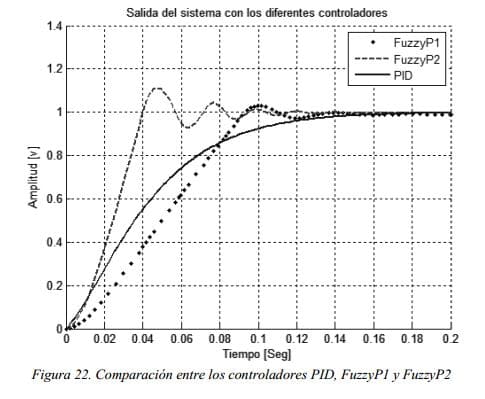
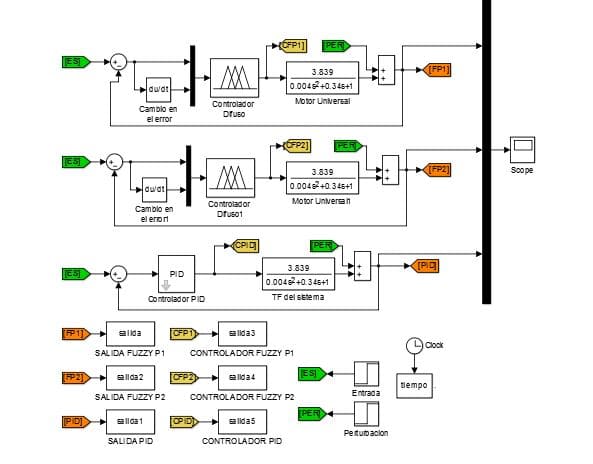
انجام پروژه متلب: دو کنترلر فازی و pid بر روی موتور یونیورسال شبیه سازی شده و با همدیگر مقایسه می گردد همراه مقاله لاتین
انجام پروژه متلب:منطق فازی بهطور گسترده در سیستم (دستگاه) استفاده میشود بدین صورت که کنترل اصطلاح “فازی” به این واقعیت اشاره دارد که منطق درگیر میتواند با آن مقابله مفاهیمی که نمیتوانند بیان شوند را “درست” یا “نادرست”، بلکه “به طور جزئی” درست بیان کند”. اگر چه روشهای جایگزین مانند الگوریتم ژنتیک و عصبی شبکهها میتوانند همانند فازی را انجام دهند اما مزیت منطق فازی در بسیاری از موارد منطقی این است که میتواند در نظر گرفته شود اپراتور انسان را میتوانید درک کنید، به طوری که تجربه خود را میتوان در طراحی کنترل استفاده کرد. این باعث میشود تا وظایف مکانیکی آسانتر شود که قبلاً با موفقیت انسان انجام شدهاست
انجام پروژه متلب: متغیرهای ورودی در یک سیستم کنترل فازی به طورکلی توسط مجموعه ای از نقشههای تابع عضویت کنترل میشوند که به عنوان مجموعههای فازی شناخته میشوند فرایند تبدیل یک مقدار ارزش ورودی به یک موجدار به یک مقدار ارزش فازی، فازی سازی نامیده میشود. در یک سیستم کنترل، نوع سوئیچ یا on/off ورودیهای همراه با ورودیهای آنالوگ و همچنین سوئیچ در ورودیها همواره یک ارتباط (حقیقت) مجموعه فازی دارند که ارزش ان برابر۱ یا ۰ است ام این طرح میتواند با آنها به سادگی برخورد کند زمانی که توابع فازی یک مقدار با مقدار دیگری اتفاق میافتد. با توجه به نمایش متغیرهای ورودی به توابع عضویت و مقادیر حقیقی، میکروکنترلر براساس اقدامات، برمبنا دستورها تصمیم میگیرد.
کنترل کنندههای فازی از لحاظ مفهومی بسیار ساده هستند. آنها از یک مرحله ورودی، یک مرحله پردازش و یک مرحله خروجی تشکیل شدهاند. در مرحله ورودی طراحی سنسور (جایابی سنسورها در سیستم) یا ورودیهای دیگر مانند سوئیچها، انگشت شست و غیره مطرح است، تابع تبدیل و مقادیر حقیقی بایستی مناسب باشد. در مرحله پردازش هر دستور در جای مناسب خود یک نتیجه میدهد، سپس نتایج را ترکیب میکند تا دستور نهایی را بدست آورد. در مرحله خروجی نتیجه ترکیبی را به یک مقدار کنترل خروجی ویژه برمیگرداند.
شایعترین شکل تابع عضویت، توابع مثلثی استهرچند منحنیهای تراپزی و زنگ نیز استفاده میشوند، اما شکل تغییر سطح و جایابیها به طورکلی اهمیت کمتری دارد. از سه تا هفت منحنی برای پوشش موردنیاز محدوده ورودی مناسب است یا جهان گفتمان در اصطلاحات فازی.
همانطور که قبلاً مورد بحث قرار گرفت، مرحله پردازش براساس مجموعه ای از قوانین منطق در فرم حالت IF-THEN شکل گرفتهاست. جایی که بخش IF به عنوان پیشخور (پیشین) و بخش THEN به عنوان پسخور(نتیجه) نامیده میشوند. سیستمهای کنترل فازی معمولاً دهها دستور دارند. یک قانون برای یک ترموستات را در نظر بگیرید:
در عمل، در مجموعه قوانین فازی چند پیش فرض ترکیب شده وجود دارد که از عملکرد فازی استفاده میکند مانند AND وOR وNOT هرچند تعاریف برای تغییر دوباره تمایل دارندو در یک تعریف عمومی از همه حداقل وزن استفاده میکنند زمانی کهOR از بیشترین مقدار استفاده میکند. همچنین یک تابع تبدیل از ۱ برای عملگر NOT وجود دارد تا تابع مکمل بدهد.
چند راه برای تعریف نتیجه دستور وجود دارد اما یکی از رایجترین و سادهترین استنتاج روش MAX/MIN است در این روش تابع خروجی مقادیر حقیقی تولید شده را به وسیله فرض قبلی به ما میدهد.
دستورها میتوانند به صورت موازی در سختافزار یا به صورت پیوسته در نرمافزار حل شوند نتایج حاصل از همه دستورها تأکید بر روش دی فازی برای رسیدن به مقادیر یکنواخت از چندین روش دارد. چندین روش وجود دارد، در تئوری، هرکدام با مزایا و اشکالات مختلفی است. روش Centroid بسیار محبوب است، مرکز جرم نتیجه مقادیر موجی است. رویکرد دیگر روش قد است که ارزش بزرگترین مشارکت کننده طول میکشد. روش centroid دستورهای بزرگترین منطقه از خروجی در حالی که ارتفاع روش بهطور پیوسته به بزرگترین مقدار خروجی حکم میکند. نمودار زیر ماکزیمم defuzzification را برای یک سیستم با ورودیهای متغیر x و y و z و یک خروجی متغیر n است. توجه داشته باشید که mu یک استاندارد منطق فازی برای مقادیر حقیقی است.
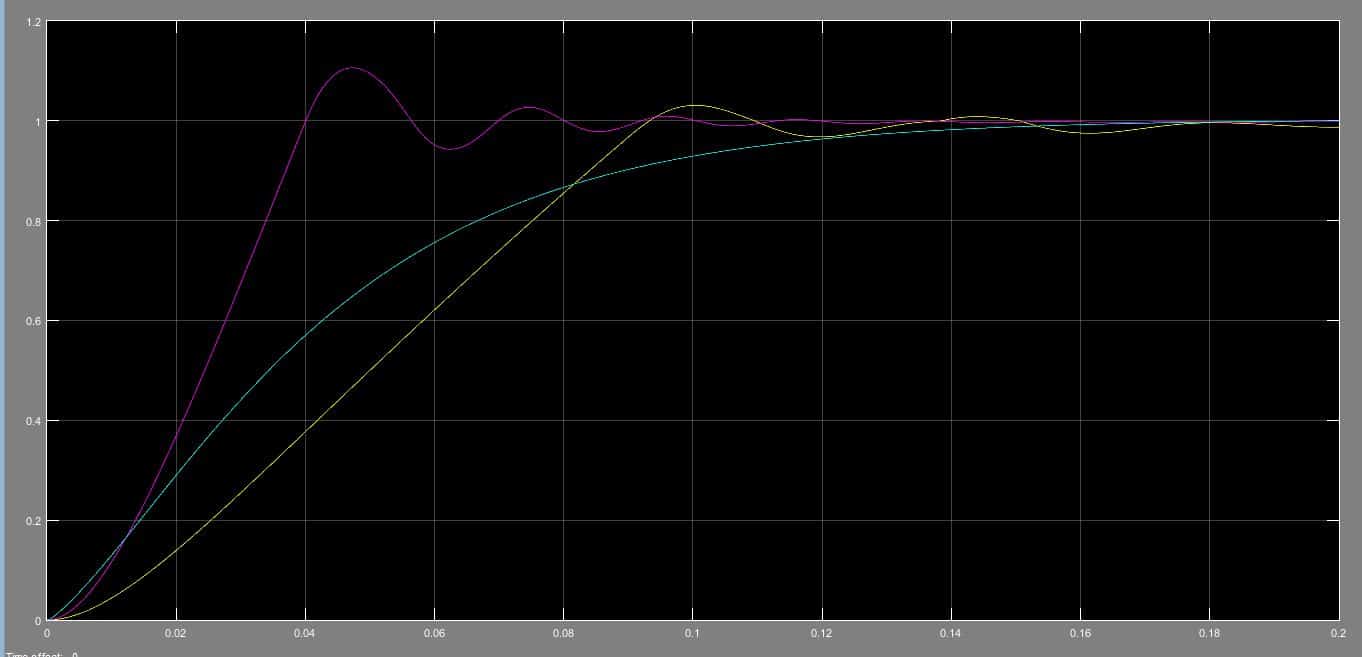
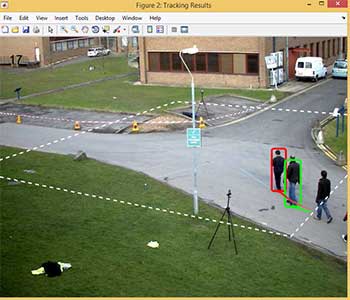
خروجی مقاله :
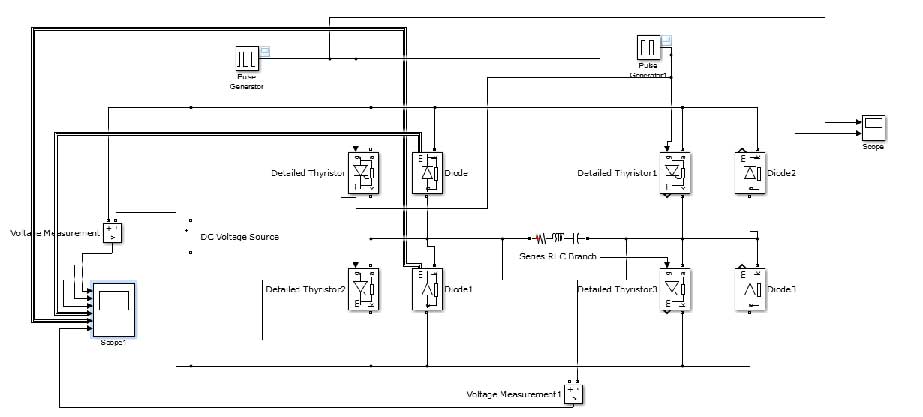
خروجی متلب:
لطفاً براي ارسال دیدگاه، ابتدا وارد حساب كاربري خود بشويد