کنترل دور موتور القایی به روش شبکه عصبی در سیمولینک متلب با گزارش و مقاله
کنترل دور موتور القایی به روش شبکه عصبی در سیمولینک متلب با گزارش و مقاله :انجام پروژه متلب
انجام پروژه متلب: در این روش از یک ساختار ساده از شبکه عصبی برای کنترل سرعت موتور القایی استفاده می کنیم که در این طرح که شامل کنترلر مبتنی بر شبکه عصبی می باشد یک مدل مرجع و یک الگوریتم برای تغییرات وزن های شبکه عصبی بمنظور هدایت سرعت از سرعت مرجع استفاده می گردد.
رویتگر شار رتور باعث تخمین شار رتور می گردد و از تئوری خطی سازی فیدبک برای جداسازی سرعت رتور و دامنه شار استفاده می گردد.
و کنترلر مورد نظر بدون استفاده از دینامیک فضای حالت سیستم و تنها با استفاده از اطلاعات ورودی و خروجی ها می توان سیگنال کنترلی ورودی موتور را تولید کرد.
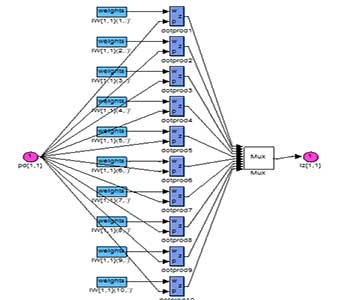
شبکه های عصبی مصنوعی در واقع مدل های محاسباتی هستند که از شبکه های عصبی طبیعی الگوبرداری شده اند.هر کدام از الگوها و نمونه ها ی به کار برده شده در شبکه های عصبی به خودی خود یک واحد پردازش هستند که نرون نامیده می شوند.عملکرد شبکه های عصبی بسیار شبیه سیستمهایی با پردازش موازی است .این سیستمها دارای پردازش گرهای زیادی است که عملیات پردازش را به صورت همزمان انجام می دهند.
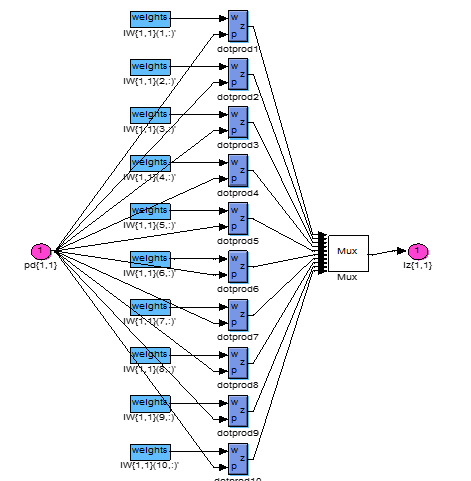
به اتصالات بین هر نرون یک عددنسبت داده می شود که ضریب وزن نام دارد.ضرائب وزن در طول مرحله آموزش تنظیم می گردند. در واقع می توان اینگونه گفت که اطلاعات برای شبکه های عصبی با این اعداد کد می شوند.در این بخش شبکه عصبی ARTMAP به طور کامل معرفی می شود.این شبکه خود از دو شبکه
۱-ART و۲-ART تشکیل شده است که هر کدام از این شبکه ها به طور مجزا توضیح داده شده است .
کنترل دور موتور القایی به روش شبکه عصبی
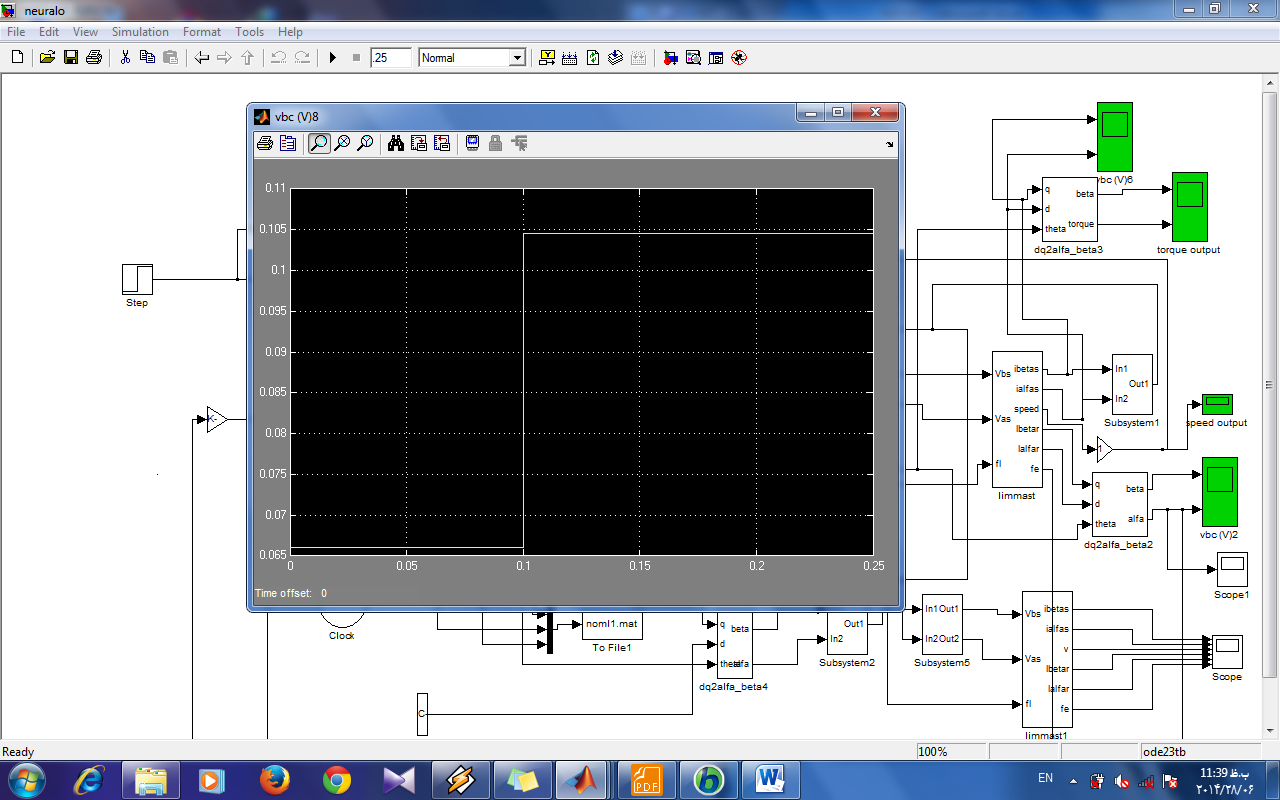
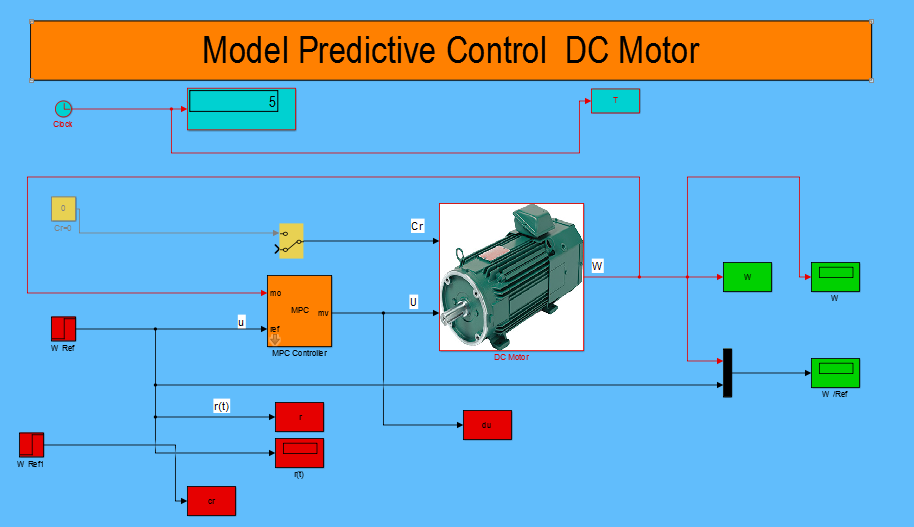
در این روش از یک ساختار ساده از شبکه عصبی برای کنترل سرعت موتور القایی استفاده می کنیم که در این طرح که شامل کنترلر مبتنی بر شبکه عصبی می باشد یک مدل مرجع و یک الگوریتم برای تغییرات وزن های شبکه عصبی بمنظور هدایت سرعت از سرعت مرجع استفاده می گردد.
انجام پروژه متلب: رویتگر شار رتور باعث تخمین شار رتور می گردد و از تئوری خطی سازی فیدبک برای جداسازی سرعت رتور و دامنه شار استفاده می گردد.
و کنترلر مورد نظر بدون استفاده از دینامیک فضای حالت سیستم و تنها با استفاده از اطلاعات ورودی و خروجی ها می توان سیگنال کنترلی ورودی موتور را تولید کرد.
و بهرحال کنترلر شبکه عصبی نسبت به تغییرات پارارمترها و اغتشاشات خارجی مقاوم می باشد و نهایتا می توان گفت که ردیابی سرعت مناسبو رتنظیم مناسب بار با استفاده از کنترلر مناسب قابل دسترس می باشد.
۱- مقدمه:
اخیرا بخاطر سرعت پیشرفت در وسایل قدرت و کنترل جهت دار میدانی تکنیک خطی سازی فیدبک و ساختار متغیر با مدلغزشی برای کنترل موتور القایی برای عملکرد بهتر مورد نیاز است و کنترل میدان جهت دار شار رتور محور q به سمت صفر و شار محور d به سمت مقدار ثابت می رسد.
۲- مدل ریاضی از موتور های القایی:انجام پروژه متلب:
دینامیک موتور القایی در محور مرجع dq باعث سرعت چرخش رتور توسط معادلات دیفرانسیلی زیر تعریف می گردد:
٢-٢ ) شبکه عصبی ۱-ART
انجام پروژه متلب: تکنیک دسته بندی وفقی توسط Carpenter وGrossberg در سال ١٩٨٧ بیان شد و آن را تئوری تشدید وفقی نامیدند.شبکه هائی که از این روش پیروی می کنند ۱-artو۲-art و… میباشند.شبکه ۱-art یک شبکه عصبی بدون سرپرست می باشد.در این شبکه مشکل پایداری_انعطاف پذیری حل شده است .حالت پایداری زمانی است که آموزش شبکه عصبی به پایان رسیده و پارامترهای شبکه ثابت شده اند.
انجام پروژه متلب: حالت انعطاف پذیری زمانی است که این پارامترها در حال تغییر هستند.در شبکه هائی مانند پرسپترون چند لایه اگر ورودی جدیدی برای آموزش به شبکه اعمال شود کلیه آموزش های قبل باید دوباره انجام شود ولی این مشکل در شبکه های ART حل شده است .معماری کلی شبکه مذکور در شکل ٢-١ آورده شده است .

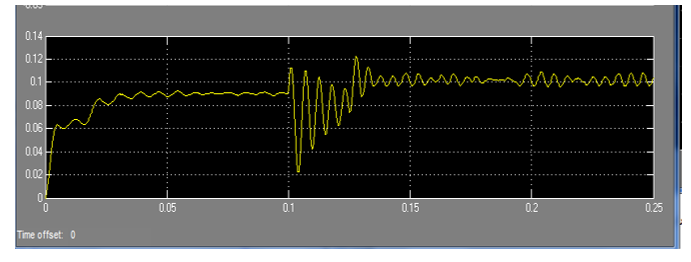
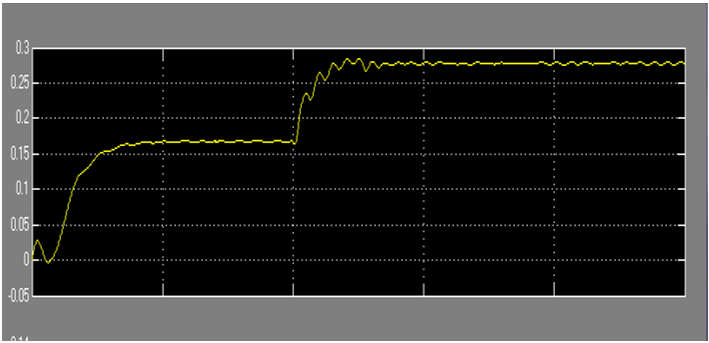
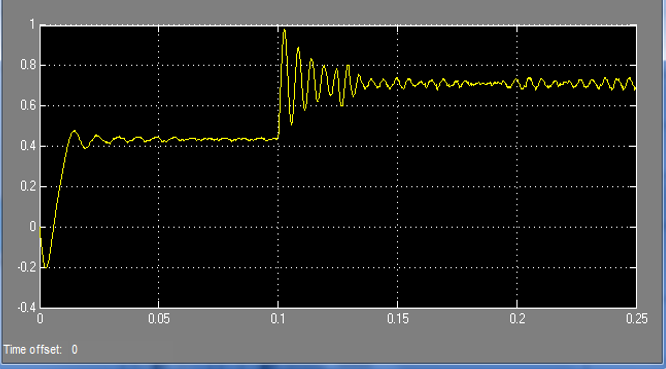
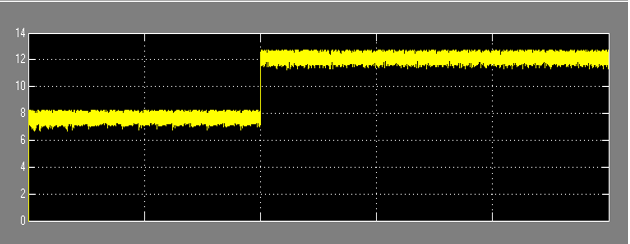
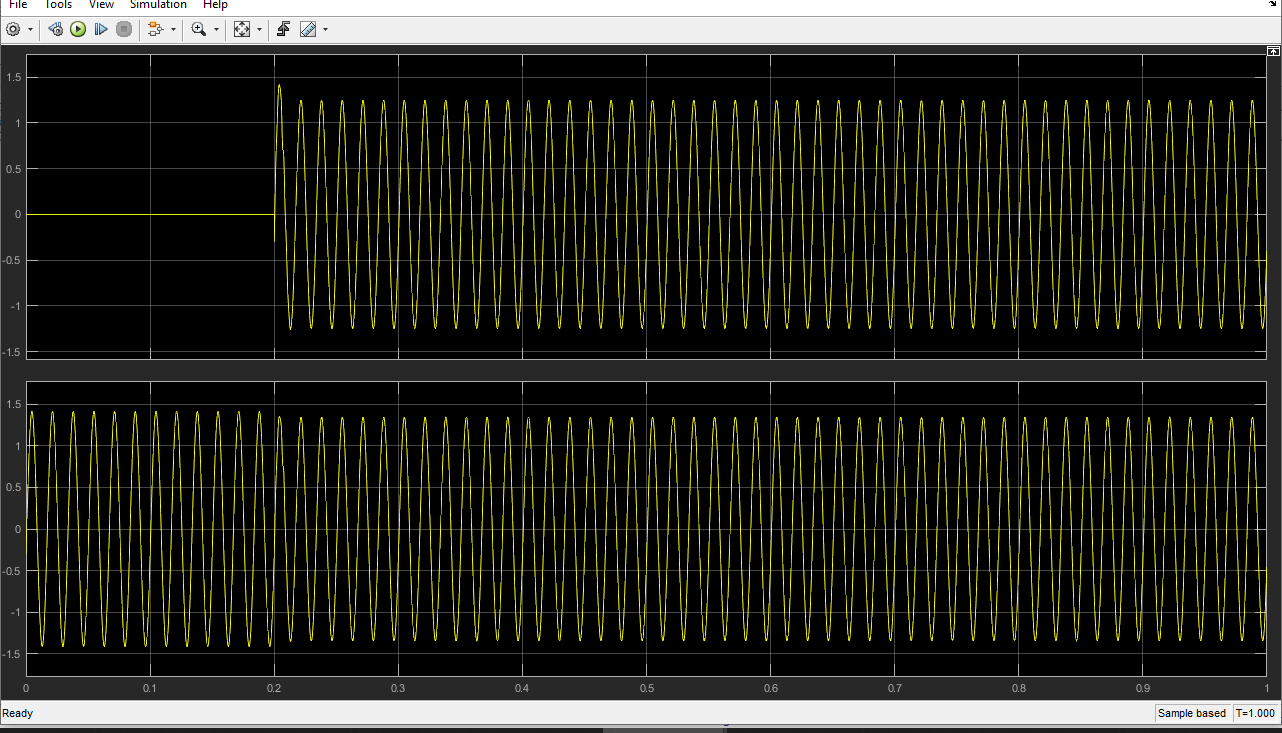
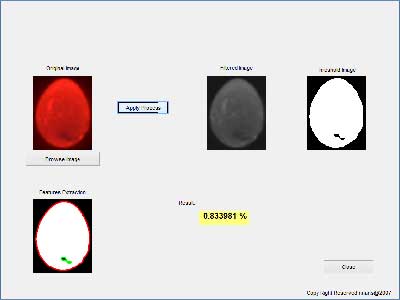
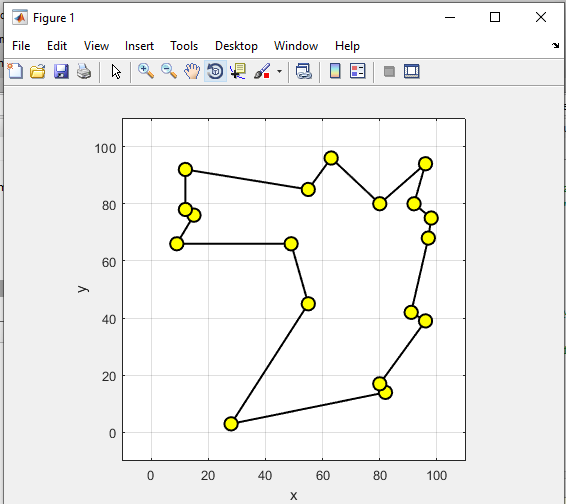
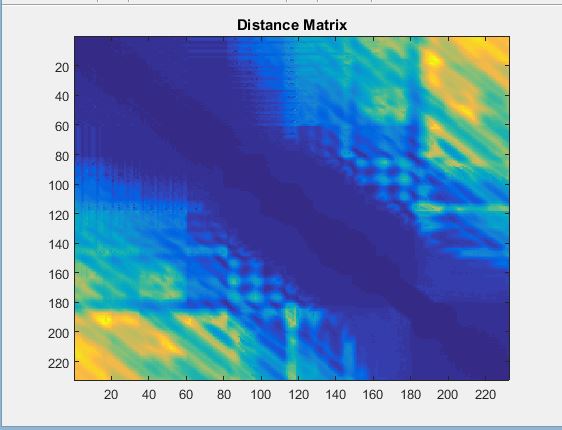
خروجی متلب:
لطفاً براي ارسال دیدگاه، ابتدا وارد حساب كاربري خود بشويد