شناسایی سیستم غیرخطی با روش vlms در متلب
شناسایی سیستم غیرخطی با روش vlms در متلب :پروژه شبیه سازی با متلب
پروژه شبیه سازی با متلب شناسایی و کنترل برخط سیستم¬های دینامیک غیر خطی یکی از زمینه¬های مورد علاقه در کنترل فرایندهای صنعتی مانند صنایع شیمیایی، پتروشیمی و همچنین کنترل ربات است. در حالی که روشهای بسیاری برای شناسایی خارج خط چنین سیستم¬هایی با استفاده از شبکه¬های عصبی معمولی ابداع و به کار برده شده است، مساله زمانبری یادگیری در این شبکه¬ها و مسایلی مانند عدم تضمین کمینه سازی فراگیر تابع هزینه یادگیری و کارکرد نامناسب این شبکه¬ها در حالت تغییر پارامتر¬های سیستم، استفاده از این شبکه¬ها را محدود می¬کند.
پروژه شبیه سازی با متلب تبدیل موجک در اواخر دهه ۸۰ معرفی گردید و به علت خواص ویژه و برتری¬اش نسبت به تبدیل فوریه و سایر تبدیل¬های مشابه، کابردهای زیادی در زمینه¬های مختلف از جمله مهندسی کنترل پیدا کرد. در این پایان نامه, ضمن مرور تبدیل موجک وخواص آن، روشهایی برای حل مسایل شناسایی و کنترل سیستم¬های غیرخطی با استفاده از تئوری موجک ارائه و توسعه داده می¬شود.
پروژه شبیه سازی با متلب روش مورد نظر در این پایان نامه استفاده از داده های ورودی و خروجی سیستم غیر خطی جهت شناسایی مدل محلی سیستم با استفاده از موجک¬ها و طراحی کنترل کننده جهت کنترل سیستم بر اساس مدل به دست آمده توسط شبکه موجک است. سیستم¬های غیر خطی خود بازگشت دسته وسیعی از سیستم¬های کنترل را شامل می¬شوند.
پروژه شبیه سازی با متلب در این پایان نامه به بررسی روش شناسایی و کنترل بر خط این گونه سیستم¬ها با استفاده از تئوری موجک می¬پردازیم. شناسایی سیستم با استفاده از داده¬های ورودی و خروجی سیستم و با استفاده از روش تعقیب تطابقی تطبیقی به صورت برخط انجام می¬شود. نتایج شبیه سازی نشان می¬دهد که استفاده از پایه¬های موجک برای شناسایی این گونه سیستم¬ها به نتایج بهتری نسبت به پایه¬های اسپیلاین منجر خواهد شد.
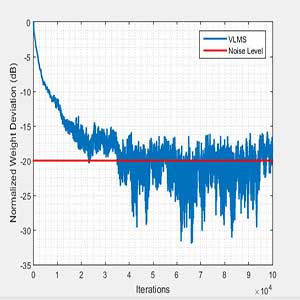
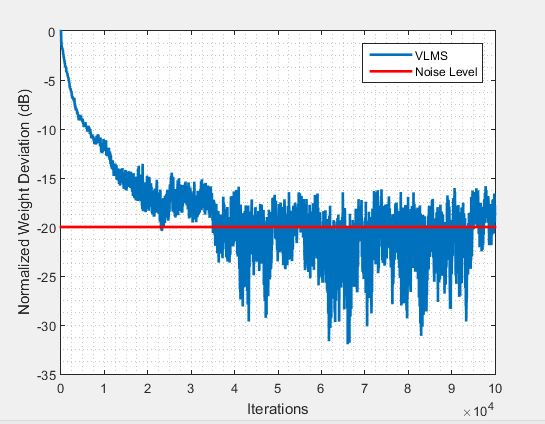
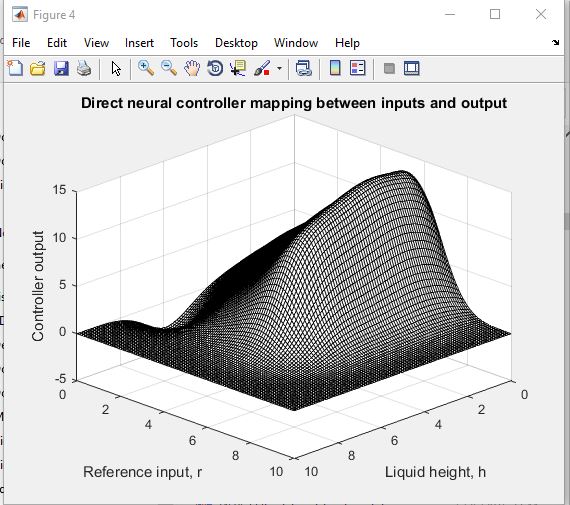
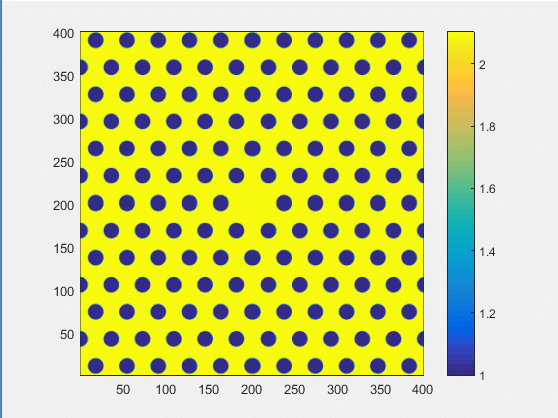
خروجی متلب :
لطفاً براي ارسال دیدگاه، ابتدا وارد حساب كاربري خود بشويد