
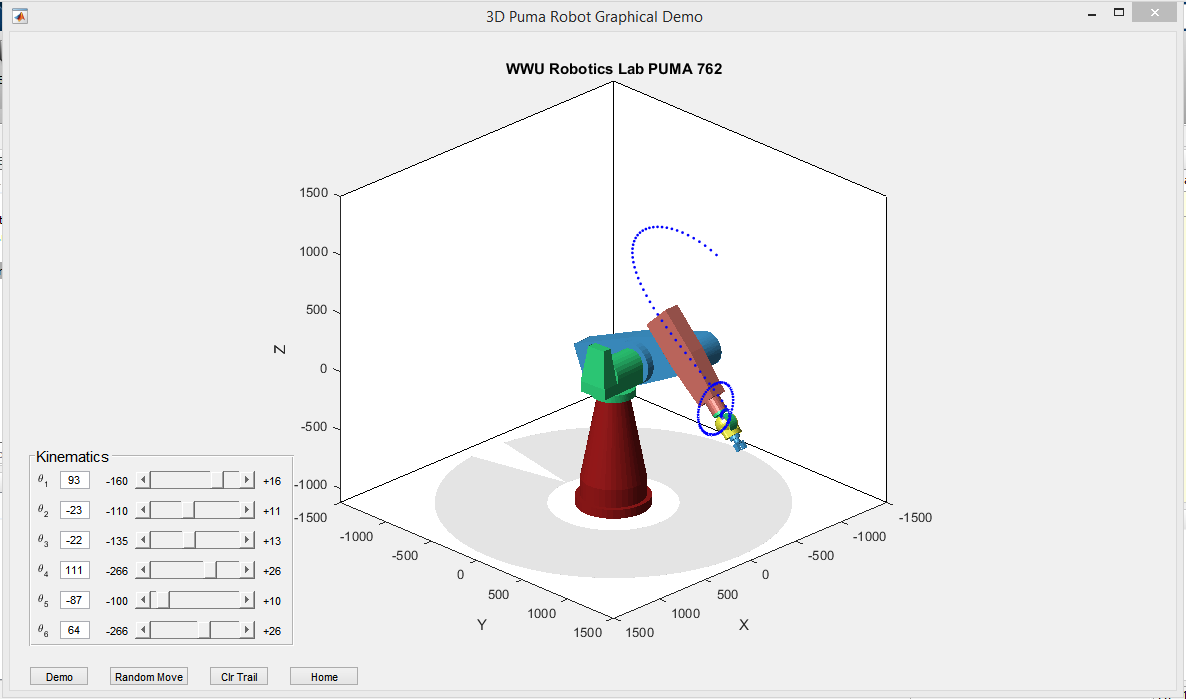
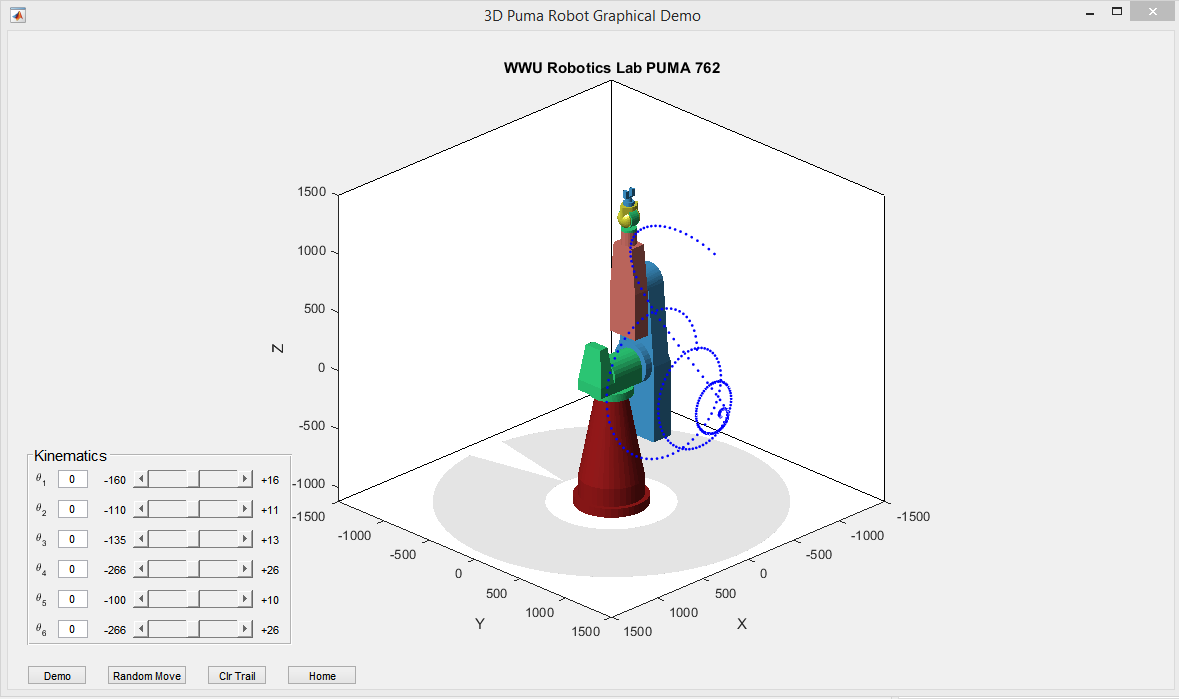
شبیه سازی بازوی مکانیکی با ۵ درجه ازادی در متلب
شبیه سازی بازوی مکانیکی با ۵ درجه ازادی در متلب :پروژه متلب
در این پروژه با کمک رابط گرافیکی میتوانید تمامی بخش های ربات را با تغییر پارامترها تغییر داد.
پروژه متلب اجزای مکانیکی و مکانیزمهای ربات
یاتاقان
یاتاقان های لغزشی
یاتاقان های غلتشی:
– بلبرینگ
– رولربرینگ
– یاتاقان های غلتک مخروطی
– یاتاقان های کف گرد
– گزینش یاتاقان ها از روی کاتالوگ تولید کننده
یاتاقان های لغزشی
سطوح تماس در این یاتاقان ها توسط قشری از سیال یا ماده چرب کننده از یکدیگر جدا می شوند
یاتاقان های غلتشی
پروژه متلببلبرینگ : معمول ترین نوع یاتاقان های غلتشی که دارای غلتک های کروی هستند .
رولر برینگ : دارای غلتک های استوانه ای هستند و به علت سطح تماس بیشتر نسبت به بلبرینگ های با همان اندازه بار محوری بیشتری تحمل می کنند .
تیپر برینگ : دارای غلتک های مخروطی هستند .
کف گرد : در جایی به کار می روند که بارهای سنگین محوری و ناهمراستایی داشته باشیم .
اتصالات
پیچ ومهره
پرچ
لحیم
جوش
چسب
خار و پین
پیچ و مهره
پرچ
خار
خارهای تخت به عنوان واسطه جهت انتقال گشتاور پیچشی بین میل محور و قطعه ای که روی آن سوار می شود به کار می روند.
خارهای حلقوی برای تثبیت قطعات روی میل محور به کار می روند.
مکانیزم ها
مکانیزم چهار میله ای
این مکانیزم کاربردهای فراوانی دارد و با بررسی آن می توان خواص تعداد زیادی از مکانیزم ها را که معادل این مکانیزم هستند مورد بررسی قرار داد.
مکانیزم چرخ و شانه
تبدیل حرکت دورانی چرخدنده به حرکت مستقیم الخط شانه
اگر α حرکت زاویه ای چرخدنده و s حرکت مستقیم الخط شانه و d قطر دایره گام چرخدنده باشد:
S = ( α / ۲ π ) * π d = α d / 2
مکانیزم لنگ و لغزنده
بارزترین نمونه استفاده از این مکانیزم، موتورهای احتراق داخلی هستند
پروژه متلبمکانیزم اسکات راسل
مکانیزم بازگشت سریع
در این مکانیزم حرکت چرخشی به یک حرکت رفت و برگشتی متناوب تبدیل می شود . در این حرکت متناوب زمانپروژه متلب رفت از زمان بازگشت بیشتر است و حرکت بازگشتی به سرعت صورت می گیرد .
مکانیزم های بادامکی
با یک مکانیزم بادامکی میتوان حرکت چرخشی بادامک را تقریبا به هر نوع حرکت خطی در پیرو تبدیل کرد
پیچ و مهره
این مکانیزم هم یکی دیگر از مکانیزم های تبدیل حرکت چرخشی به حرکت مستقیم الخط است.
چرخ ضامن دار
چرخ ضامن دارمتشکل است از :
۱- چرخ
۲- گیره
مهمترین ویژگی چرخ ضامن دار این است که گیره فقط اجازه حرکت در یک جهت را به چرخ میدهد
چرخ ژنوا
با استفاده از این مکانیزم می توان یک حرکت چرخشی پیوسته را به حرکت چرخشی منقطع تبدیل کرد.
چرخ دنده و گیربکس
صاف
مارپیچ
مخروطی
حلزونی
گیربکس
گیربکس سیاره ای
انتخاب الکتروموتور مناسب
چرخ دنده ساده
دایره گام (Pitch Circle)
گام دایره ای (p)
P = π d / N
مدول (m)
m = d (mm) / N
نسبت انتقال سرعت
( WA / WB ) = ( NA / NB )
چرخ دنده های مارپیچ و مخروطی
درگیری تدریجی دنده ها و حرکت نرم
حلزون و چرخ حلزون
پروژه متلب محورهای انتقال قدرت متنافرا برهم عمود هستند.
امکان انتقال قدرت با نسبتهای بزرگ میسر است.
حرکت به طور یکطرفه از حلزون به چرخ حلزون منتقل می شود.
نسبت انتقال سرعت حلزون به چرخ حلزون
( WG / WW ) = ( NW / NG )
حلزون معمولا یکراهه است.
گیربکس
گیربکس سیاره ای
پروژه متلب در این گیربکس ها محور یک یا بیش از یک چرخد نده نسبت به تکیه گاه حرکت می کند .
معمولا ورودی به چرخد نده خورشیدی داده می شود ، خروجی از بازو گرفته پروژه متلب می شود و چرخ دنده حلقه ای ثابت است .
محور چرخ دنده خورشیدی ثابت و محور چرخ دنده های سیاره ای متحرک است .
گیربکس سیاره ای
با سری کردن چند دستگاه چرخ دنده سیاره ای میتوان به گیربکسی با نسبت تبدیل بالا و اندازه مناسب دست یافت.
انتخاب الکتروموتور مناسب
سرعت، توان و گشتاور خروجی
گشتاور معیاری است جهت سنجش قدرت گردشی موتور
T = Fd sin a
با استفاده از گیربکس گشتاور الکتروموتور را افزایش و سرعت زاویه ای آن را کاهش می دهیم .
توان
P = Tω
پولی و تسمه
زنجیر و چرخ زنجیر
ربات هوشمند مسیر یاب
ربات مسیریاب چه باید بکند؟
صورت مساله ی ساخت ربات مسیریاب )تعقیب خط( در مسابقات مختلف دارای جزییات زیاد و بعضا متفاوتی می باشد، اما اصل موضوع در همه ی آنها این است که ربات باید بتواند خط مشکی رنگی به عرض ۱٫۸ سانتی متر)معمولا چسب برق( را در یک صفحه ی سفید دنبال کند؛ یعنی با قرار دادن ربات در ابتدای خط مشکی و روشن کردن آن، ربات باید بتواند خط مشکی را دنبال کرده و هرکجا خط پیچید، او هم بپیچد.
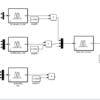
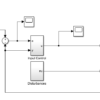
بلوک دیاگرام یک ربات مسیریاب:
از نظر کلی هر ربات باید:
*از طریق سنسورهایش اطلاعاتی را از دنیای خارج جمع آوری نماید.
*این اطلاعات را به اطلاعات قابل فهم مغز پردازشگر خود تبدیل و به
آن منتقل کند.
*بر طبق برنامه ریزی قبلی، اطلاعات را پردازش و تصمیم مناسب را
اتخاذ نماید.
*تصمیمات نهایی را به کمک عملگرهایش اجرا کند.
ربات مسیریاب نیز شامل همین اجزاست:
*برای حس کردن خط، به دست کم دو سنسورکه تفاوت رنگ سفید و مشکی را درک کنند، نیاز دارد.
*اطلاعات خروجی سنسور از طریق یک مدار سوییچ یا مبدل آنالوگ به
دیجیتال به واحد پردازشگر منتقل می شود.
*مغز پردازشگر این ربات می تواند یک مدار منطقی یا یک میکروکنترلر
از هر نوعی باشد.
*تصمیم واحد پردازشگر مبنی بر ادامه ی مسیر یا پیچیدن به چپ و راست، از طریق فرمان های داده شده به موتورهای ربات از نوع dc)آرمیچر( یا پله ای stepper انجام می پذیرد.
عملکرد ربات مسیریاب:
ربات مسیریاب عملکرد ساده ای دارد. این ربات دارای دست کم دو یا سه سنسور نوری است که دو طرف خط مشکی در زمینه ی سفید قرار می گیرند. دو موتور نیز وظیفه ی به حرکت درآوردن دو چرخ ربات را بر عهده دارند. هرگاه ربات در حین حرکت، به انحرافی در خط مشکی برخورد کند، یکی از سنسورهایش
وارد خط می شود، مثلا اگر خط مشکی به سمت راست منحرف گردد، سنسور سمت راست ربات وارد خط مشکی می شود. ربات باید با توجه به سنسوری که وارد خط شده، جهت انحراف را تشخیص داده و به همان
طرف بپیچد. ساده ترین راه برای پیچیدن به یک طرف، خاموش کردن موتور همان سمت و ادامه ی کار موتور جهت مخالف می باشد.
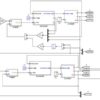
خروجی متلب :














دیدگاه ها