شبیه سازی کنترلر pid با کمک مبدل باک
شبیه سازی کنترلر pid با کمک مبدل باک :پروژه متلب آماده
پروژه آماده متلب : کنترل کننده های مشتق انتگرال تناسبی (PID) یک دسته از کنترل کننده های صنعتی برای دستیابی به ویژگی های بهینه از نقطه نظر پاسخ زمانی هستند. کنترل مجموعه ای از متغیرهای فیزیکی تولید مانند موقعیت، سرعت، دما یا فشار توسط این دسته از کنترل کننده ها انجام می شود. این نوشته آموزشی در مورد طراحی و تنظیم کنترلر PID مطالبی را ارائه می دهد و سپس به بررسی این مطلب در شبیه سازی نرم افزار متلب خواهیم پرداخت.
این دسته از سیستم های کنترلی می تواند در رباتیک ، سیستم های مکانیکی ، الکترومکانیکی و در سیستم های قدرت به وفور مورد استفاده قرار گیرد.
تئوری اصلی کنترل PID که چگونگی بهره گیری از کنترل کننده های تناسبی، انتگرال و مشتق را توضیح می دهد در چندین فرآیند می تواند مورد استفاده قرار گیرد که از مهمترین آنها استفاده از کنترل کننده های PID در ردیابی مسیر می باشد. کاربردهای دیگر نظیر رد اغتشاش نیز می تواند در برنامه نویسی کنترل کننده های PID مورد استفاده قرار گیرد.
در این پروژه اثر تنظیم پاسخ سیستم حلقه بسته با کنترل کننده PID و تعامل این متغیرها نشان داده شده است. با یک مثال مفصل یک تکلیف پروژه دانشجویی در این نوشته بررسی شده است.
مفهوم سیستم های PID به خوبی در نرم افزار متلب پیاده شده است و این نرم افزار قادر است با توجه به ویژگی های زمانی پاسخ مطلوب نظیر میزان اورشوت (بالازدگی پاسخ) ، زمان نشست ، خطای حالت ماندگار و … کنترل کننده PI یا PID متناسب را به شما معرفی کند.
جعبه ابزار Simulink متلب برای به کارگیری این مزیت از یک تنظیم تحت عنوان PID tuner (تنظیم کننده PID) استفاده کرده است که دارای یک پلتفرم ساده می باشد که به راحتی می توان آن را به کار گرفت.
مقدمه ای بر کنترلرهای PID
پروژه آماده متلب کنترل کننده های تناسبی انتگرالی مشتق گیر (PID) را می توان روی یک تراشه به کار گرفت یا به عنوان یک میکرو کنترلر دیجیتال مورد استفاده قرار داد، بنابراین اغلب پیش می آید که یک مهندس کنترل امروزه نیاز به طراحی یک PID داشته باشد.
این سیستم کنترلی را می توان به وسیله قطعات گسسته و آپ امپی طراحی کرد. انواع دیجیتالی (گسسته در زمان) کنترل کننده های PID در صنعت مورد استفاده قرار می گیرند.
در طراحی یک کنترل کننده PID مهمترین گام تنظیم بهره های تناسبی، انتگرال و مشتق برای سیستم حلقه بسته مورد نظر می باشد.
روش های موجود شامل ۱) آزمون و خطا، ۲) زیگر نیکولز، ۳) روش تنظیم کوهن کون ۴) نرم افزار می باشد. این نوشته روش ۴ را با استفاده از نرم افزار matlab در یک مورد عملی بحث خواهد کرد.
تئوری کنترل کننده های PID
شرح زیر به عنوان مروری بر نظریه کنترل کننده PID ارائه شده است. کنترلرها در سیستم های حلقه بسته برای تأثیرگذاری بر پاسخ سیستم به تغییرات و اختلالات نقطه تنظیم طراحی می شوند. ورودی کنترلر سیگنال خطا است که تفاوت بین نقطه تنظیم و بازخورد (فیدبک) خروجی سیستم حلقه بسته می باشد.
برای درک این مسئله شکل ۱ را ملاحظه کنید.

شکل ۱ ) سیستم در حضور کنترل کننده PID
همانطور که از نام آن پیداست، کنترل کننده PID سه عمل جداگانه در سیگنال خطا ارائه می دهد
پروژه آماده متلب خروجی کنترلر تناسبی، انتگرال و مشتق را تولید می کند. اقدام تناسبی، خروجی متناسب با سیگنال خطا y(t) = Kp * e(t) تولید می کند. بنابراین، هیچ اقدام تناسبی انجام نخواهد شد مادامی که خروجی سیستم (پلنت) برابر با نقطه تنظیم باشد، زیرا در این حالت خطا صفر است. با در نظر گیری بهره تناسبی Kp که بزرگتر از ۱ واحد می باشد، کنترل کننده سیگنال بزرگتری در پاسخ به یک خطا تولید می کند. این تقویت سیگنال خطا منجر به پاسخ سریعتر به خطاها می شود، اما ممکن است بی ثباتی را اضافه کنید این اثرات توسط پاسخی که زمان خیزش کوتاهتری دارد و از طرفی افزایش بالازدگی سیستم (اورشوت پاسخ) خود را نشان می دهد. برعکس، کاهش بهره تناسبی زمان خیزش را افزایش و اورشوت را کاهش می دهد. اما کاهش بیش از حد آن می تواند باعث شود تا خطای حالت ماندگار افزایش یابد. (می توانید این مورد را در سایر کنترل کننده ها نظیر مدلغزشی نیز مشاهده کنید)
پروژه آماده متلب عمل مشتق یک سیگنال کنترلی متناسب با نرخ زمانی تغییر خطا ارائه می دهد. y(t) = Kd * de(t)/dt. عمل مشتق یک عنصر پیش بینی کننده برای کنترلکننده به شمار می رود، پاسخ کنترلکننده به تناسب سرعت تغییرات خطا خواهد بود به این شکل که پاسخ بزرگتر به سیگنالهای خطا در حال تغییر سریع و پاسخ کوچکتر به سیگنال های خطای در حال تغییر آرام ارائه میدهد. این امکان پاسخ سریعتر حالت گذرای سیستم را بدون افزایش اورشوت فراهم می کند. درصد بیش از حد عمل مشتق به تنهایی تأثیر کمی بر رفتار حالت ماندگار دارد. کنترلر مشتق گیر به تنهایی نمی تواند یک خطای ثابت (خطای حالت ثابت) را حذف کند زیرا مشتق خطا در این حالت صفر است که این خروجی صفر را برای کنترل کننده تولید می کند.
عمل انتگرال یک خروجی متناسب با انباشته (انتگرال) خطا تولید می کند. بهره انتگرالی، به کنترل کننده اجازه می دهد تا خطای حالت ماندگار بین نقطه تنظیم و خروجی سیستم را صفر کند (yk = integral(et)) از منظر تئوری سیستم کنترل، عبارت انتگرال گیر باعث بهبود پاسخ حالت ماندگار سیستم می شود چرا که با افزودن یک صفر در مبدا مرتبه سیستم را یک واحد افزایش داده و تغییرات مفیدی در مارگین های فازی سیستم حلقه بسته پدید می آورد. عبارت یکپارچه ساز ثابت را بهبود می بخشد، چرا که انتگرال گیر تضمین می کند که حتی خطاهای کوچک نیز در نهایت جمع می شوند تا خروجی کنترلر قابل توجه تولید شود.
ترکیب سه عمل یاد شده باعث تولید خروجی کنترلر زیر خواهد شد :
معادله ۱ )
پروژه آماده متلب در رابطه ۱، y(t) خروجی سیستم، e(t) سیگنال خطا، Kp، Ki، و Kd عبارتند با ثابت های بهره تناسبی، بهره انتگرال و مشتقی. انتخاب سه ثابت Kp، Ki، و Kd، به منظور رسیدن به یک پاسخ خاص به عنوان تنظیم شناخته می شود. تنظیم دستی شامل به دست آوردن این ثوابت به شیوه ای سیستماتیک با استفاده از آزمایش های متعدد است
. جدول ۱ اثرات هر پارامتر کنترل کننده بر پاسخ سیستم نشان می دهد. اینها فقط دستورالعمل هستند و
نتایج در عمل ممکن است متفاوت باشد. برای یادگیری پاسخ واقعی نیاز به آزمایش یا شبیه سازی سیستم خاص شما با استفاده از کنترلر مورد نظر دارد.

جدول ۱ ) تاثیر افزایش پارامترهای کنترل کننده PID بر پاسخ سیستم
بکارگیری نرم افزار متلب
پروژه آماده متلب اگر بتوان دانش مدل ریاضی سیستم را به دست آورد، در آن صورت می توان از نرم افزار برای تعیین مقادیر Kp، Ki و Kd استفاده کرد. یکی از نرم افزارهای محبوب Matlab بسته نرم افزار تجاری شرکت Mathworks است . جعبه ابزار کنترل/سیستم خطی متلب شامل بسیاری از توابع داخلی برای کمک به نمایش و محاسبه است
نرم افزار متلب یک شبیه سازی و طراحی مبتنی بر مدل است که می تواند برای مدل سازی کنترل کننده PID و سیستم (پلنت) استفاده شود. برای استفاده از Simulink نیاز به قرار دادن آیکون های بلوک برای نشان دادن اجزا و سپس اتصال آنها داریم.
شبیه سازی در متلب
پروژه آماده متلب به منظور شبیه سازی بهتر است ابتدا به پست های آموزش شبیه سازی در متلب (لینک) نگاهی داشته باشید. ابتدا بایستی یک فایل به عنوان محل ذخیره سازی شبیه سازی در سیستم در نظر بگیرید (مسیر این فولدر بایستی تماما با نام های لاتین نامگذاری شود)، سپس کار را با ساخت یک مدل در محیط سیمولینک متلب آغاز می کنیم. در این شبیه سازی نیازی به کدنویسی در داخل سیمولینک نخواهیم داشت و هر آنچه هست به صورت بلوک دیاگرامی قابل انجام است. همانطور که صحبت شد سیمولینک متلب یک محیط کاربرپسند در طراحی سیستم های کنترل برای مدل های مختلف به ویژه مدل های خطی فراهم کرده است. از آن جمله طراحی سیستم کنترل PID می باشد. بلوک های اصلی مورد استفاده عبارتند از بلوکی برای پیاده سازی سیستم خطی (پلنت) که با استفاده از یک Transfer function قابل پیاده سازی می باشد. بلوک مهم بعدی بلوک آماده PID متلب است. سایر بلوک ها شامل نمایشگر ، ورودی پله و جمع کننده می باشد.
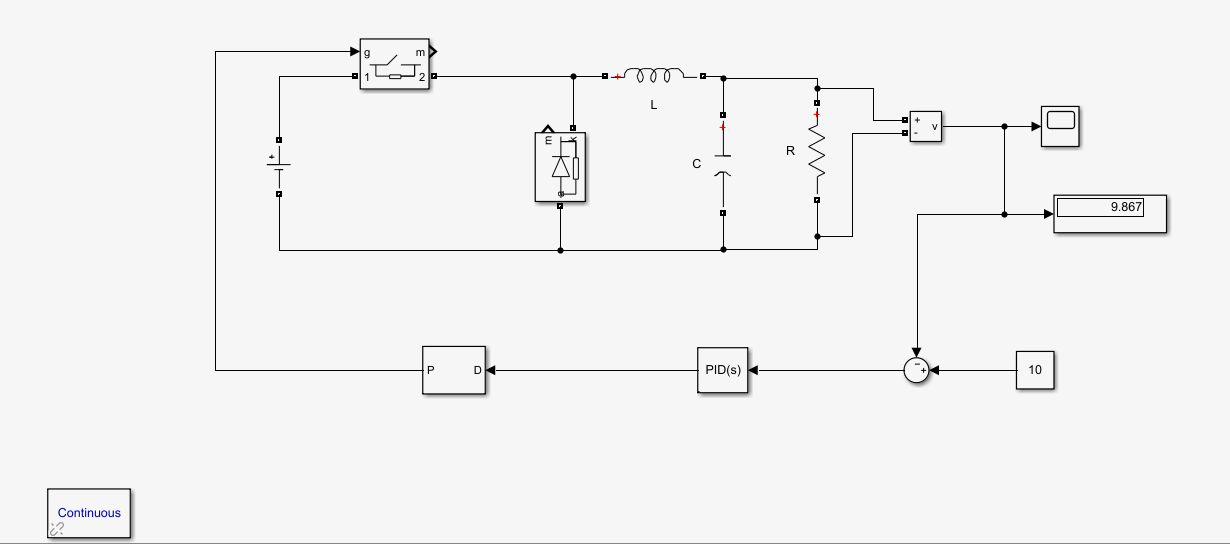
شکل زیر سیستم حلقه بسته برای شبیه سازی در سیمولینک متلب را نمایش می دهد. بحث دوم اغتشاش در سیستم می باشد. این اغتشاش می تواند در هر جای مسیر باشد اما به طور متداول می توان آن را در خروجی پلنت در نظر گرفت .

شکل ۲ ) شبیه سازی انجام شده در سیمولینک متلب
پروژه آماده متلب حال می توان سیستم را یکبار بدون تنظیم پارامترهای PID و بار دیگر بدون این فرایند انجام داد که نتیجه مقایسه این دو در شکل زیر آورده شده است.

شکل ۳ ) مقایسه پاسخ سیستم در دو حالت PID تنظیم شده و ضرایب متداول
به منظور تنظیم پارامترهای بلوک PID با دو بار کلیک بر روی بلوک و باز کردن تنظیمات شکل زیر را خواهیم داشت :

شکل ۴ ) صفحه تنظیمات کنترل کننده PID در سیمولینک متلب
در این تنظیم بایستی ابتدا موازی یا سری بسته شدن بخش های سه گانه PID انتخاب شود و البته اینکه می خواهیم بلوک کنترلی PID کامل باشد یا PI یا … . سپس با کلیک بر روی Tune می توانیم تنظیم مناسبی با الگوریتم متلب برای مقادیر تناسبی ، انتگرالی و مشتقی و همچنین مقدار N در ساخت مشتق گیر برسیم.
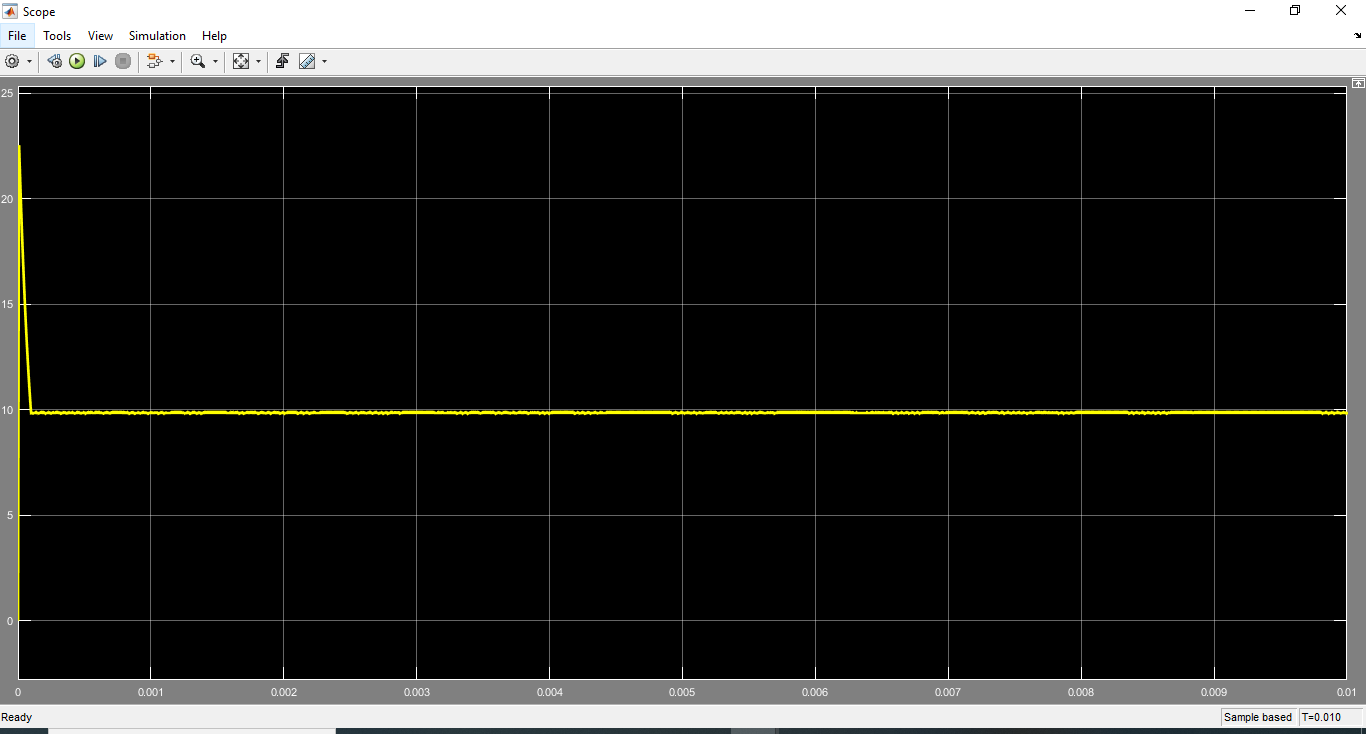
پس از تنظیم نتیجه زیر برای خروجی سیستم بدست می آید :

شکل ۵ ) نتیجه خروجی سیستم به ازای ورودی پله و اعمال اغتشاش در ثانیه ۱۰ از شبیه سازی
خروجی متلب :

لطفاً براي ارسال دیدگاه، ابتدا وارد حساب كاربري خود بشويد