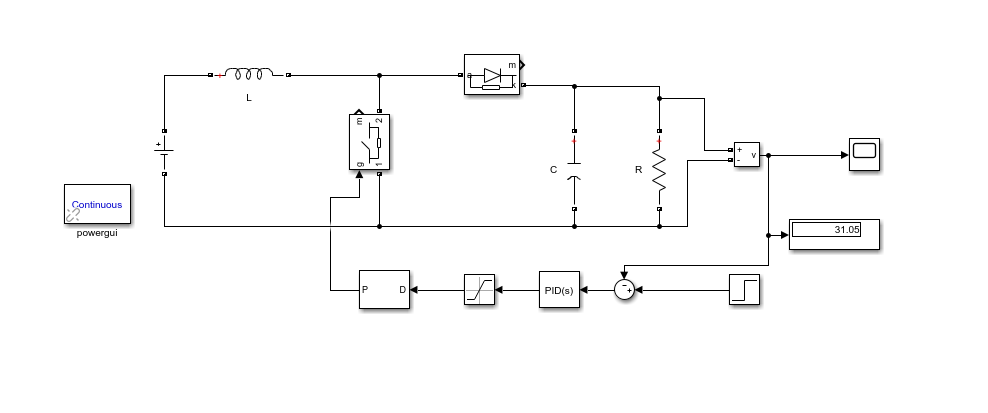
طراحی کنترلر pid تقویت شده در متلب
طراحی کنترلر pid تقویت شده در متلب : پروژه متلب
تنظیم کنترلر PID :
PID مخفف چه چیزی است؟
پروژه متلب مخفف کنترل کننده متناسب، انتگرال، و مشتق است. این یک توصیف ریاضی از طرز فکر شما است. PID به شما کمک می کند تا به طور خودکار به هدف خود برسید، دقیقاً به همان روشی که برای انجام آن به صورت دستی استفاده می کردید. این نمودار یک ساختار کلی برای یک کنترلر PID را نشان می دهد.
کلاس

پروژه متلب بنابراین، برای تشکیل یک کنترلر PID به چه چیزی نیاز دارید؟
شما به شش عنصر اساسی زیر نیاز دارید:
-
پروژه متلب
خطا: تفاوت بین فرمان شما و خروجی کنترلر است.
- اصطلاح P: یک ثابت است که مستقیماً با مقدار خطا مرتبط است. اگر خطای بزرگی دارید، این عبارت خروجی زیادی به شما می دهد. و اگر یک خطای کوچک داشته باشید، یک خروجی کوچک به شما می دهد، به همین سادگی! عبارت P بر سرعت رسیدن به هدف شما تأثیر می گذارد.
- اصطلاح I: ثابت مربوط به ادغام (جمع) خطاها در طول زمان است. اگر خطای شما در حال افزایش است، این عبارت خروجی زیادی به شما می دهد. با این حال، اگر خطا در حال کاهش باشد، عبارت I یک خروجی کوچک به شما می دهد. بنابراین از آن برای تنظیم دقیق نتایج استفاده می شود، یعنی وقتی تقریباً به هدف خود می رسید، اصطلاح P دیگر نمی تواند به شما کمک کند (در واقع در اینجا بر علیه شما کار می کند!)، عبارت I همانی است که می توانید روی آن حساب کنید تا سیگنال خطا را به شما برساند. به صفر.
-
پروژه متلب
- اصطلاح مشتق D: ثابت مربوط به نرخ تغییر (مشتق) خطاها با زمان است. این یعنی چی؟ به این معنی که اگر سیگنال خطای شما به سرعت تغییر کند، یعنی یک سیستم بسیار پویا مانند یک مولتی کوپتر داشته باشید، عبارت D به شما خروجی بالاتری می دهد تا با تغییرات هماهنگ شوید. از سوی دیگر، اگر خطای شما به آرامی تغییر کند، مانند مثال دمای اتاق، عبارت D چیزی به اندازه کافی سریع برای تقویت پیدا نمی کند. بنابراین به دنبال سیگنال نویز شما (که معمولاً فرکانس بالایی دارد) می گردد و آن را تقویت می کند تا زندگی شما را بدتر کند! اصطلاح D اگر به طور کامل تنظیم نشود، یک کنترل کننده بسیار خطرناک است!
- محدودیت ها: باید خروجی هر یک از کنترلرهای قبلی را محدود کنید!
- در نهایت، مطمئناً به سیستم خود نیاز دارید! مگر اینکه از شبیه سازی ها راضی باشید.
-
پروژه متلب
بنابراین، چگونه پارامترهای PID خود را برای پاسخ بهینه تنظیم میکنید؟
| اغلب تیونینگ یک هنر بیش از یک علم است. سیستم را مشاهده کنید و از حدس شهودی و استدلال منطقی خود استفاده کنید. در اینجا هفت قانون طلایی برای تنظیم عمومی PID وجود دارد: |
- پس از پاک کردن تمام پارامترها، عبارت P را افزایش دهید تا خروجی در کمترین زمان ممکن به هدف برسد.
- اگر خروجی شما شروع به نوسان کرد، به این معنی است که P بیش از حد دارید. ترم P خود را تا زمانی که نوسان ناپدید شود کاهش دهید. در نهایت کمی بالاتر یا پایین تر از هدف خود خواهید بود. نگران نباشید؛ در مرحله بعدی آن را برطرف خواهیم کرد.
- اکنون، عبارت I را کمی افزایش دهید تا زمانی که خطای شما برطرف شود. توجه داشته باشید که مقادیر I معمولی بسیار کوچک هستند (مثلاً به ترتیب یک هزارم) و به نرخ به روز رسانی حلقه PID شما بستگی دارند. اصطلاح I زمانی بسیار مفید است که سیگنال های خطای خارجی روی سیستم شما تأثیر می گذارد (به عنوان مثال باد در مولتی کوپتر). در صورت امکان، خطای شما را به صفر می رساند.
- اگر احساس می کنید خروجی شما در حال نوسان است و قبل از تنظیم عبارت I نبوده است، مقدار من را کمی پایین بیاورید.
- برای بسیاری از سیستم های دینامیکی کند، کار شما تقریباً تمام شده است! فقط باید به آخرین مرحله بپرید.
-
پروژه متلب
با این حال، هنگامی که با سیستم های بسیار پویا سر و کار دارید، باید عبارت D را تنظیم کنید. اگر احساس میکنید خروجی شما از تغییرات خطا عقب میماند و سخت تلاش میکنید اما نمیتوانید آنها را بگیرید، این عبارت را کمی افزایش دهید.
- اگر سیستم شما با فرکانس بالا و انتقال های کوچک شروع به نوسان می کند، احتمالاً اصطلاح D بیش از حد دارید که نویز شما را تقویت می کند. D را به طور مناسب کاهش دهید. اما اگر سیستم شما نویز زیادی دارد، بهتر است این پارامتر را صفر نگه دارید.
پروژه متلب
- آخرین اما نه کم اهمیت ترین، مراقب محدودیت های خود باشید! اگر پارامترهای قبلی را بدون تغییر محسوس در خروجی تغییر میدادید، به یاد داشته باشید که محدودیتها سیگنال خروجی شما را کاهش میدهند. احتمالاً آنها را افزایش دهید، اما مراقب باشید که سیستم خود را بسوزانید یا اشباع نکنید.
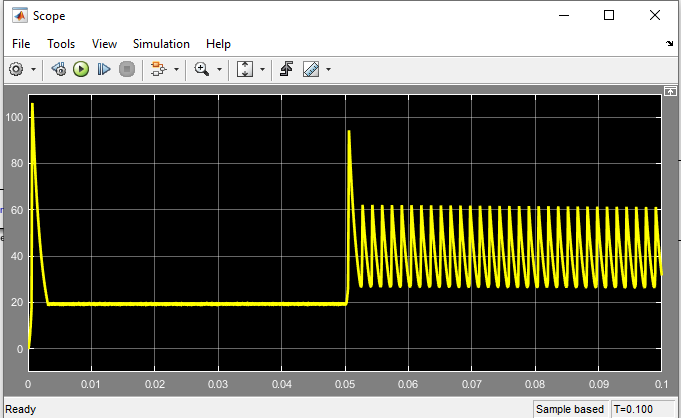
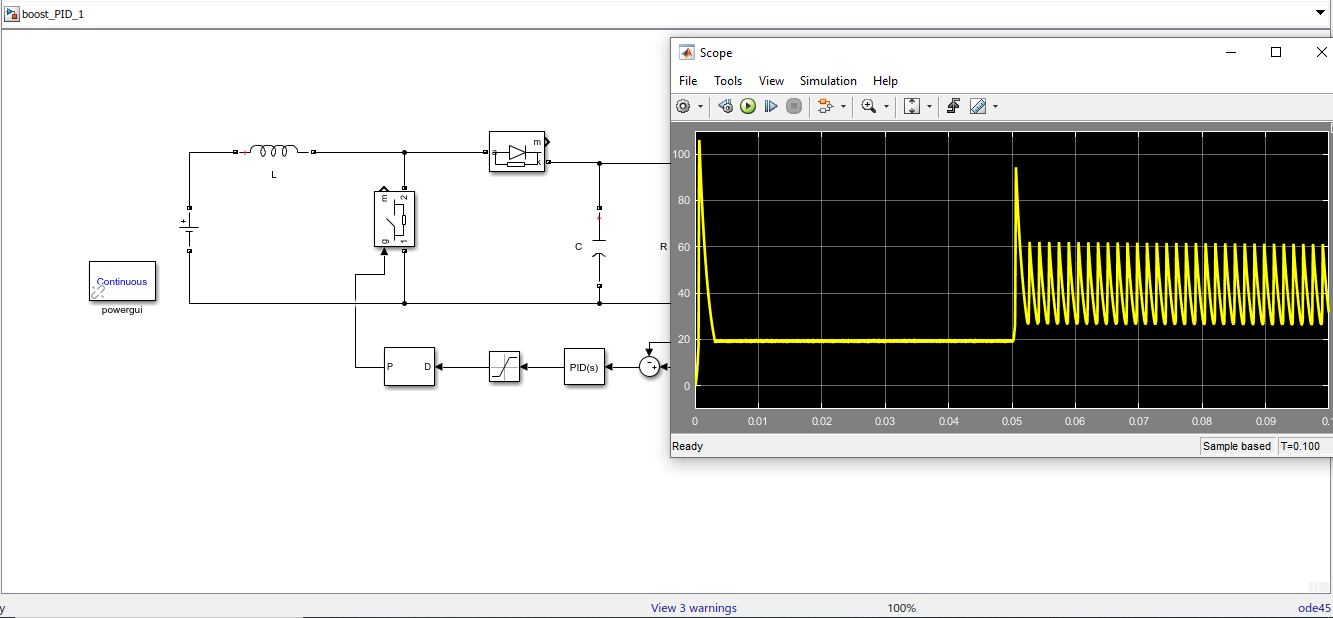
خروجی متلب :
لطفاً براي ارسال دیدگاه، ابتدا وارد حساب كاربري خود بشويد