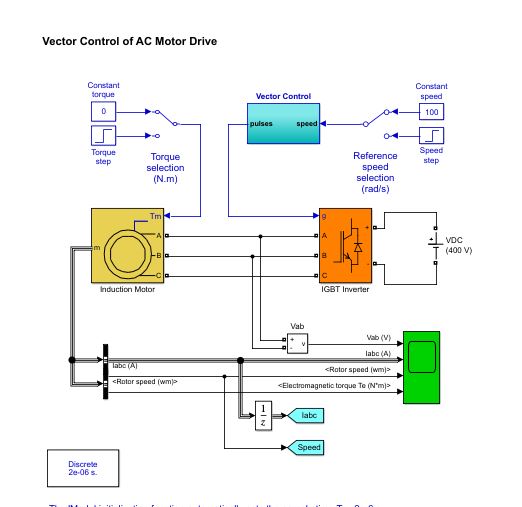
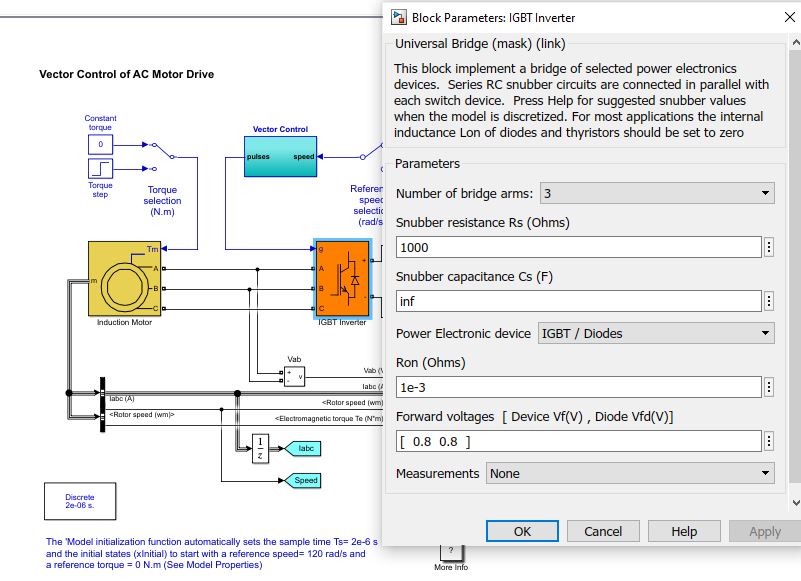
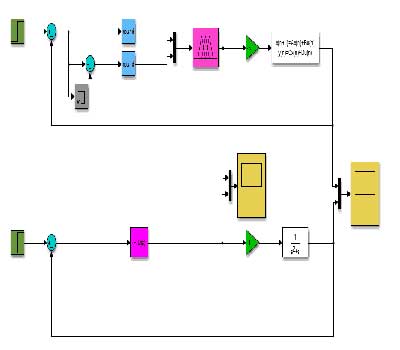
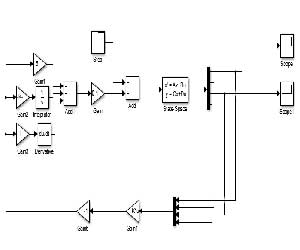
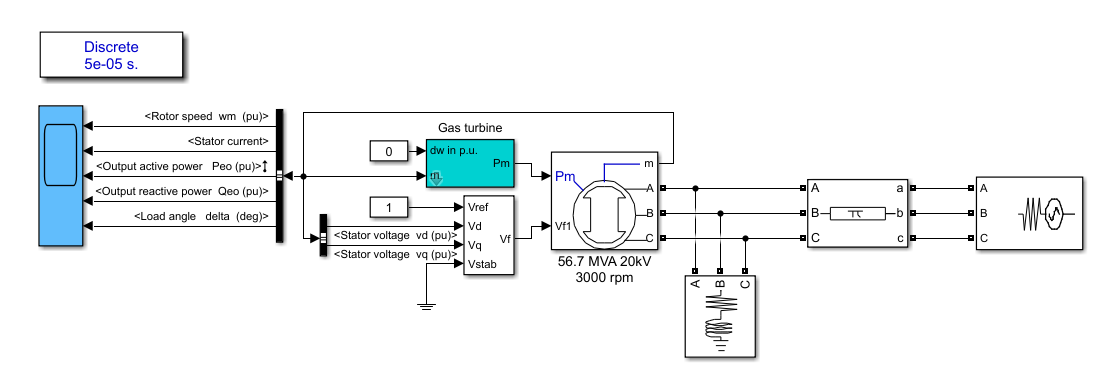
شبیه سازی کنترل برداری روی موتور القایی همراه اینورترIGBT در متلب
شبیه سازی کنترل برداری روی موتور القایی همراه اینورترIGBT در متلب :پروژه متلب
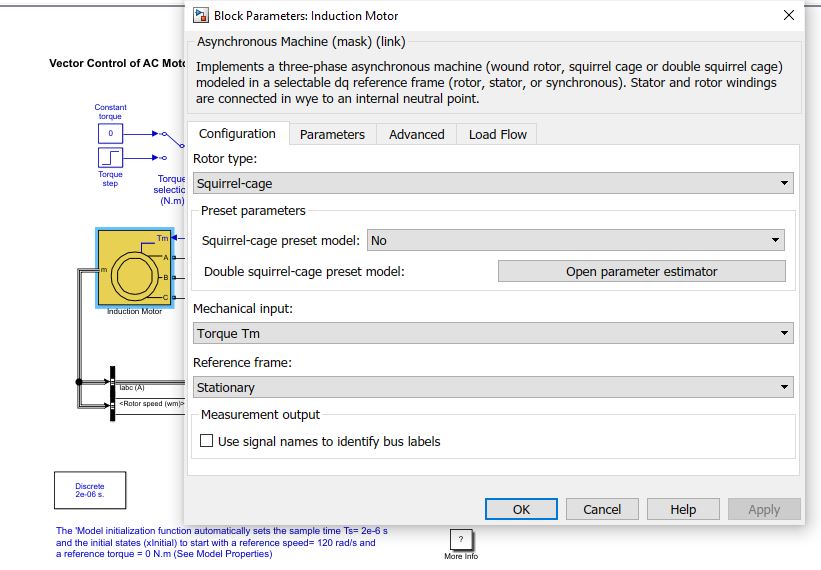
یک موتور القایی یا موتور آسنکرون (غیر همزمان) یک موتور الکتریکی جریان متناوب (AC) است که در آن جریان الکتریکی روتور (بخش متحرک) که برای تولید گشتاور مورد نیاز است از طریق القای الکترومغناطیسی از سوی میدان مغناطیسی سیم پیچ استاتور به دست می آید. موتورهای القایی از پرکاربردترین موتورهایی هستند که در سامانههای کنترل حرکت صنعتی و همچنین خانگی به کار گرفته میشوند.
موتور های القایی یا آسنکرون را در واقع ترانسفورماتور گردان هم می نامند دلیل این مقایسه شباهت زیاد کار این الکتروموتور با ترانسفورماتور است که هر دو بر اساس القا کار می کنند و با تفاوت که روتور در ان اتصال کوتاه شده و سبب چرخش روتور می شود.
طراحی ساده و عملکرد پایدار، بهای ارزان، هزینه نگهداری کم و اتصال آسان و کامل به یک منبع برق AC (تکفاز و سهفاز) برتریهای بنیادی موتورهای القایی هستند. انواع گوناگونی از موتورهای القایی برای کاربردهای گوناگون در بازار هست. با اینکه طراحی موتورهای القایی آسانتر از موتورهای DC است، کنترل سرعت و گشتاور در انواع مختلف موتورهای القایی نیازمند درک ژرفتر از عملکرد و طراحی و ساخت این نوع موتورهاست.
یک موتور الکتریکی در روتور خود انرژی الکتریکی را به انرژی مکانیکی تبدیل میکند. برای تأمین توان مورد نیاز روتور راههای مختلفی وجود دارد. در موتور DC توان آرمیچر مستقیماً به وسیله یک منبع جریان مستقیم تأمین میشود، در حالی که در موتور القایی این توان از استاتور در روتور القا میشود. موتورهای القایی را به علت شباهت زیاد به ترانسفورماتور، ترانسفورماتور دوار نیز مینامند چرا که استاتور این موتورها از نظر عملکرد شباهت زیادی به سیمپیچ اولیه و روتور آنها به سیمپیچ ثانویه ترانس دارد. از موتورهای القایی به ویژه موتورهای القایی سهفاز بهطور گستردهای در صنعت استفاده میشود.
قدرت بالا، ساختار ساده و بینیاز بودن از جاروبکها (که به تعمیر و نگهداری زیادی نیاز دارند) و قابلیت بالای موتورهای القایی برای کنترل سرعت از جمله دلایل استفاده از آنهاست.
اصول عملکرد و مقایسه با موتورهای سنکرون
بزرگترین تفاوت موتور القایی و موتور سنکرون این است که در موتور سنکرون جریان روتور بهطور مستقیم از یک منبع خارجی تأمین میشود. این جریان در روتور میدان مغناطیسی تولید خواهد کرد و به دلیل اثر متقابل میدانهای استاتور و روتور، روتور در جهت میدان دوار استاتور خواهد چرخید.
از طرفی در اثر القای جریان در روتور، اختلافی بین سرعت میدان دوار و سرعت گردش روتور به وجود میآید، چرا که در غیر این صورت روتور نسبت به میدان دوار امکان حرکت نداشته، هادیهای روتور شار میدان تولید شده استاتور را قطع نکرده و در نتیجه ولتاژی در روتور القا نخواهد شد. این اختلاف سرعت بین سرعت میدان دوار و سرعت حرکت روتور در اصطلاح لغزش (Slip) نامیده میشود. لغزش یک مؤلفه بدون واحد است. از آنجا که در موتورهای القایی اختلاف سرعت شرط و ضرورت عملکرد آنهاست به این موتورهای موتورهای غیرهمزمان یا آسنکرون میگویند.
انواع
- براساس تعداد فازها:
- موتور القایی سهفاز (خود راه انداز)
- موتور القایی تکفاز (غیر خود راه انداز)
- بر اساس نوع روتور:
- موتور القایی روتور قفسی
- موتورالقایی روتور سیمپیچی شده
فرمولها
مهمترین رابطه در موتورهای القایی رابطه بین فرکانس منبع f، تعداد زوج قطبها p و سرعت میدان دوار ns است
{\displaystyle f={\frac {p\,n_{s}}{120}}}.

از این رابطه خواهیم داشت
- {\displaystyle {\mbox{Synchronous speed, }}n_{s}={\frac {120f}{p}}\quad [{\mbox{rev/min}}]}
![{\displaystyle {\mbox{Synchronous speed, }}n_{s}={\frac {120f}{p}}\quad [{\mbox{rev/min}}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/0b926c306764a932d28544600d448c5ceaa0d025)
و سرعت روتور برابر است با
- {\displaystyle {\mbox{Rotor speed, }}n_{r}=n_{s}(1-s)\,\!}

و s نشاندهنده لغزش (Slip) است و از این رابطه به دست میآید
- {\displaystyle s={\frac {n_{s}-n_{r}}{n_{s}}}}

در موتورهای سنکرون سرعت روتور همیشه برابر سرعت میدان دوار است و از رابطه {\displaystyle n_{s}={\tfrac {120f}{p}}} به دست میآید.

ساختار
مانند همه موتورها، موتور القایی نیز از یک قسمت ایستا به نام استاتور (بدنه موتور) و یک محور گردان که درون استاتور میچرخد و روتور نام دارد، تشکیل شدهاست. میان استاتور و روتور فاصله ای اندک و یکنواخت است. موتورهای سهفاز (سنکرون و القایی) تنها نوعی از موتورها هستند که در آنها بهطور ذاتی یک میدان مغناطیسی چرخنده از سوی استاتور (به دلیل تغذیه سهفاز آن و نیز موقعیت سیم پیچِ فازها نسبت به هم) ساخته میشود. این در حالی است که موتورهای DC به عاملی الکتریکی (یا مکانیکی) برای تشکیل این میدان چرخنده نیاز دارند. البته موتور القایی تکفاز نیز نیازمند عاملی بیرونی برای پدیدآوردن این میدان مغناطیسی چرخشی است. ویژگی جالب و مهم موتورهایی که با برق سهفاز تغذیه میشوند این است که به دلیل ماهیت جریانهای سهفاز (که هر کدام با دیگری ۱۲۰ درجه اختلاف فاز دارد) و نیز نحوه قرار گرفتن سیم پیچهای استاتور (سیم پیچ هر فاز با دیگری، ۱۲۰ درجه اختلاف مکانی دارد)، میدان الکترومغناطیسی حاصل از آنها در استاتور به چرخش در میآید. در موتور القایی، این میدان مغناطیسی چرخنده، در (هادیهای) روتور جریان القاء میکند (مانند ترانسفورماتورها). در اثر برهمکنش میدان مغناطیسیِ این جریان القاء شده در روتور و میدان مغناطیسی چرخنده استاتور، روتور نیز به چرخش واداشته میشود (بر اساس قانون لنز).
استاتور: استاتور موتورهای القایی از قطبهای سیمپیچی شدهای تشکیل شده که با گذر جریان از آنها و تولید میدان مغناطیسی، در روتور ولتاژ القا میکنند. استاتور از چندین نواره باریک آلومینیوم یا آهن سبک ساخته شدهاست. این نوارهها به صورت یک استوانه تهی به هم منگنه و سخت شدهاند (هسته ایستان). سیم پیچهایی از سیم روکش دار در این شیارها جاسازی شدهاند. هر گروه پیچه با هستهای که آن را فرا گرفته یک آهنربای مغناطیسی (با دو پل) میسازد. تعداد قطبهای یک موتور القایی به اتصال درونی پیچههای ایستان بستگی دارد. پیچههای استاتور مستقیماً به منبع انرژی متصلند. آنها به گونهای در استاتور قرار گرفتهاند که با اِعمال تغذیه سهفاز، یک میدان مغناطیسی چرخنده در استاتور تولید میشود. تعداد قطبها با توجه به سرعت و گشتاور مورد نیاز میتواند مختلف باشد ولی تعداد آنها همواره یک عدد زوج است.
روتور: روتور از چندین بخش جدای باریک فولادی که میانشان میلههایی از مس یا آلومینیوم پیشبینی شده ساخته شدهاست. روتور موتورهای القایی به دو صورت است:
- روتور قفسسنجابی
- روتور سیمپیچیشده
در رایجترین نوع روتور (روتور قفسسنجابی) این میلهها در پایانه خود به صورت الکتریکی و مکانیکی از سوی حلقههایی به هم بسته شدهاند. کمابیش ۹۰ درصد از موتورهای القایی دارای روتور قفسسنجابی میباشند و این به خاطر آن است که این نوع روتور ساختاری پایدار و ساده دارد. این روتور از هستهای چند تکه استوانهای با اهرمی که شکافهای همراستا برای جادادن رساناها درون آن دارد پدید آمدهاست. هر شکاف یک میله مسی یا آلومینیومی یا آلیاژی را در بر میگیرد. این میلهها با زنجیرههای پایانی آنها عمداً اتصال کوتاه میشوند. چون این ساختار درست مانند قفس سنجاب است، این نام برای آن گذاشته شدهاست. میلههای گردان دقیقاً با محور موازی نیستند، به جای آن به دو دلیل مهم، کمی اریب کار گذاشته میشوند؛
- موتور بدون صدا کارکرده و نیز از هارمونیکهای شکاف کاسته شود.
- گرایش روتور به چفت شدن (Hang) کمتر شود. دندانههای روتور به دلیل جذب مغناطیسی میکوشند که در برابر دندانههای استاتور باقی بمانند. این اتفاق هنگامی رخ میدهد که شمار دندانههای روتور و استاتور برابر باشند.
روتور از سوی مهارهایی (بوشن، یاتاقان) در دو سر محور سوار شده، یک سر محور برای انتقال نیرو بلندتر از طرف دیگر گرفته میشود. ممکن است بعضی موتورها محوری فرعی در دیگر سو (غیر گردنده – غیر فرستنده نیرو) برای نصب حسگرهای (سنسور) موقعیت و سرعت داشته باشند. بین استاتور و روتور شکافی هوایی موجود است. بعلت القا، توان از استاتور به روتور برده میشود. گشتاور پدید آمده، روتور را می چرخاند.
به دلیل مزایای زیاد روتورهای قفسی از جمله سادگی، هزینه کمتر، نیاز کمتر به تعمیر و نگهداری و… رایجترین روتورها در موتورهای القایی روتورهای قفسی هستند. این روتورها از میلههایی از جنس مس یا آلومینیوم تشکیل شدهاند که یه صورت یک استوانه به همدیگر متصل شدهاند و در دو طرف به وسیله دو حلقه اتصال کوتاه شدهاند. روتورهای سیمپیچی شده در صنعت کاربردهای خاص خود را دارند و بیشتر در موتورهایی که نیاز به گشتاور راهاندازی بالایی دارند مورد استفاده قرار میگیرند.
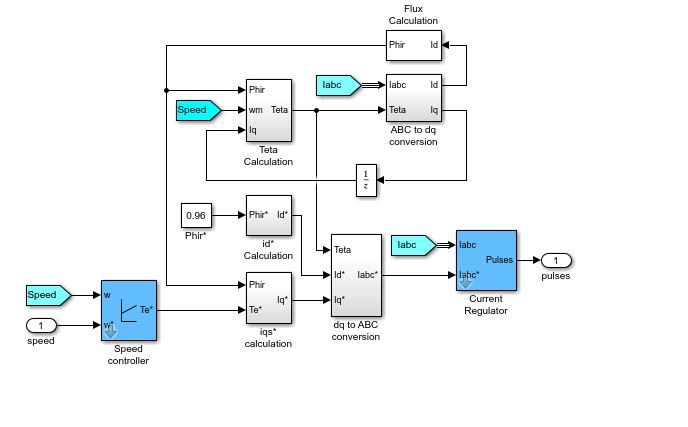
کنترل برداری که قبلاً کنترل میدانی یا (FOC) نامیده میشد، یک روش کنترل درایو فرکانس متغیر(VFD) است که یک موتور الکتریکی AC سه فاز را با استفاده از دو متغیر خروجی اینورتر VFD کنترل میکند:
- اندازهٔ ولتاژ
- فرکانس (زاویهٔ ولتاژ، یا فاز فقط به صورت غیر مستقیم کنترل میشوند.)
FOC یک روش کنترل است که برای استفاده در کاربردهای AC سنکرون و موتور القایی استفاده میشود. که در اصل برای کاربردهای موتورهای با کارایی بالا توسعه یافته است که میتوانند در سرعت نامی خود به نرمی کار کند و در سرعت صفر با گشتاور کامل کار کند و شتاب بالای مثبت و منفی داشته باشند، ولی به مرور برای کاربردهای با کارایی پایین تر با توجه به کاهش اندازه موتور FOC، هزینه و مصرف برق آن هم جذاب شد.
FOC در موتورهای القایی با توجه به کارایی بالای آنها از گذشته هنوز خیلی همگانی نشده است ولی انتظار میرود در نهایت در همه جا جایگزین کنترل تک متغیره اسکالر ولت بر هرتز (V/f) شود.
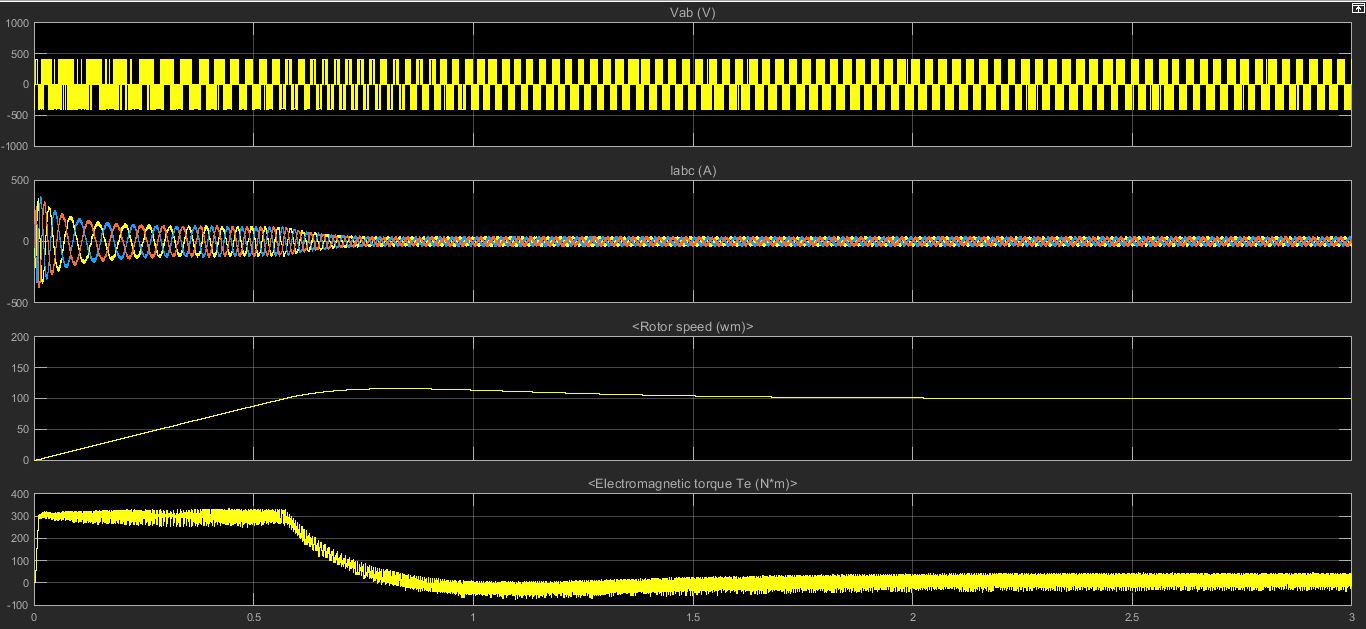
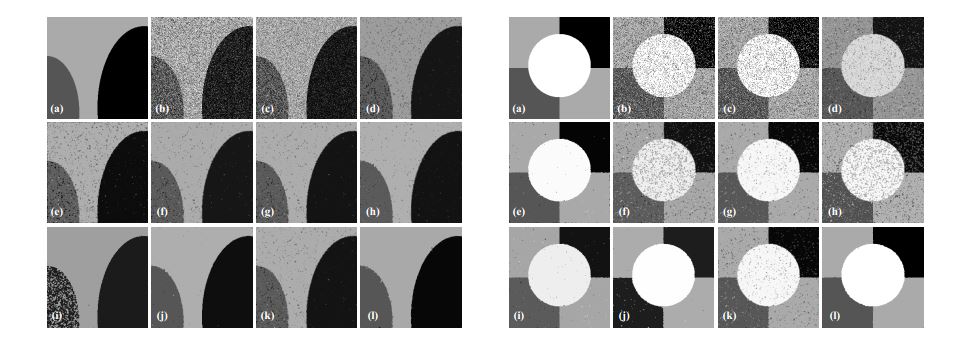
خروجی متلب :
لطفاً براي ارسال دیدگاه، ابتدا وارد حساب كاربري خود بشويد