شبیه سازی کامل موتور bldc با امکان تغییر پارامتر موتور با داکیومنت:انجام پروژه متلب
شبیه سازی کامل موتور bldc با امکان تغییر پارامتر موتور و دیدن خروجی های موتور بصورت رابط گرافیکی:انجام پروژه متلب
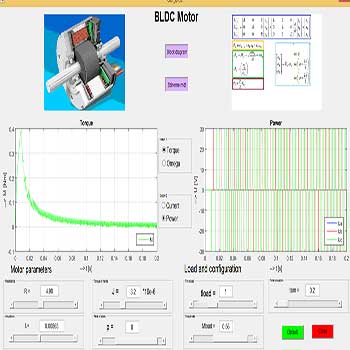
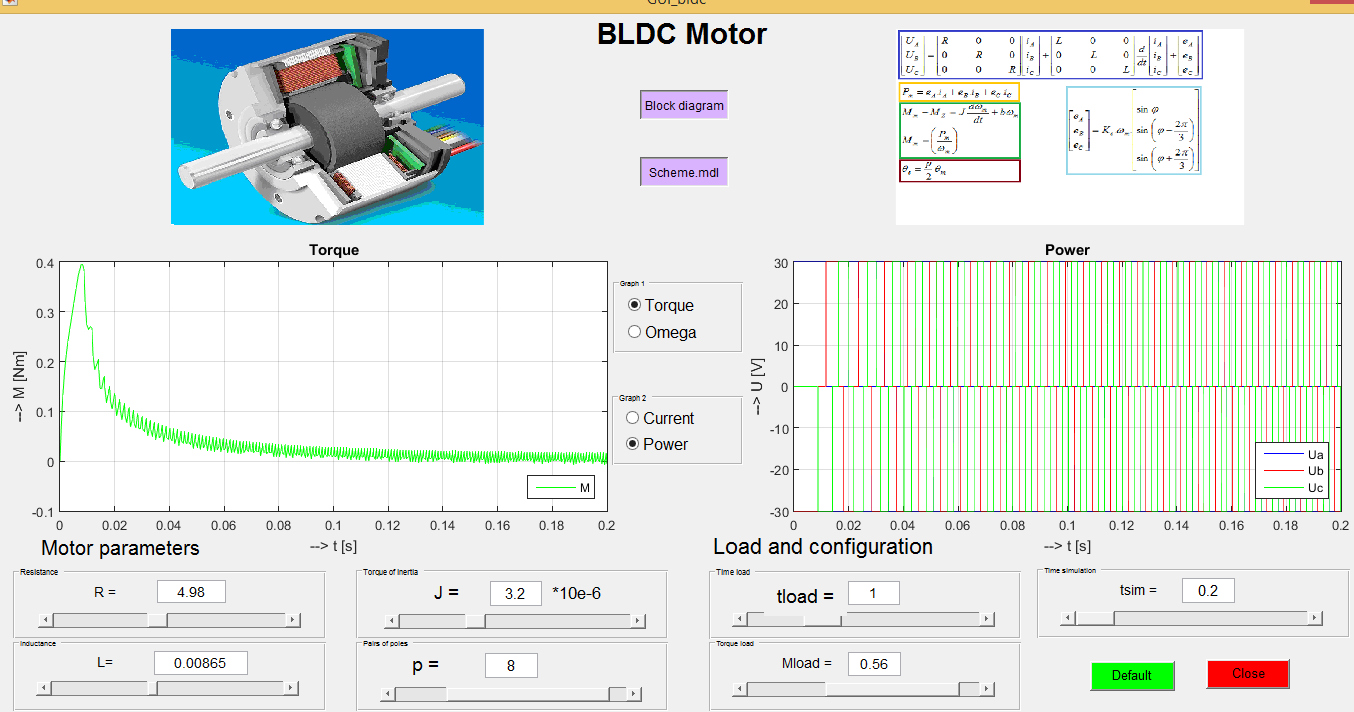
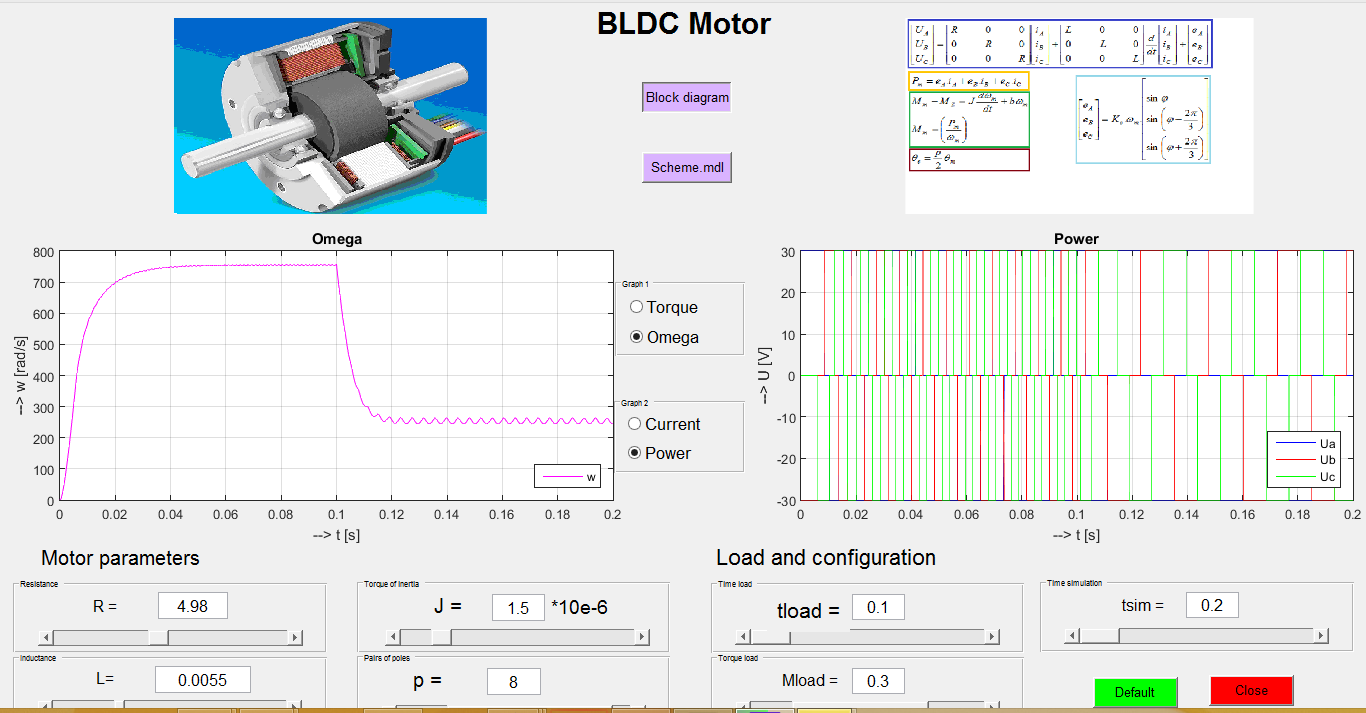
شبیه سازی این سیستم کامل انجام شده است و بصورت گرافیکی می توانید مقادیر مقاومت و سلف موتور bldc رو عوض کنید و خروجی های موتور را آنلاین مشاهده نمایید.
موتور bldc:
موتورهای دیسی براشلس (electrically commutated motors) شبیه به موتورهای سنکرونی هستند که با منبع دیسی تغذیه میشوند که توسط اینورتر مجتمع برای به حرکت درآوردن موتور به سیگنال الکتریکی AC تبدیل میشود؛ سنسورها و قطعات الکترونیکی دیگری نیز خروجی اینورتر را کنترل مینمایند.موتورهای براشلس همچنین به صورت موتورهای پلهای وصف میشوند، هرچند عنوان موتور پلهای برای آن دسته از موتورها به کار میرود که طراحی آنها به گونهای است که به حالتهایی عمل نمایند که روتور آن به سرعت در نقطه زاویهای تعریفشده بایستد.
موتورهای دیسی براش به طور تجاری از سال ۱۸۸۶ مورد استفاده قرار گرفت. موتورهای براشلس تا ۱۹۶۲ مورد استفاده تجاری قرار نگرفتند.
موتورهای براش گشتاور بیشینه را در لحظه سکون فراهم میآورند؛ این گشتاور به صورت خطی با افزایش سرعت کاهش مییابد. برخی محدودیتهای موتورهای براش میتوانند در موتورهای براشلس جبران شوند. آنها کارایی بالاتری را به همراه داشته و همچنین حساسیت کمتری نسبت به سایش مکانیکی کموتاتور دارند. این فواید در برابر کاهش نیرو، پیچیدگی بیشتر، و کنترل الکترونیکی گرانتر بدست آمدهاست. موتور براشلس آهنرباهای دائمی دارد و میگردند و آرمیچر در آن ثابت است؛ به همین دلیل مشکلات به وجود آمده به خاطر ارتباط مستقیم جریان با آرمیچر چرخان از میان برداشته شدهاند. در این موتورها یک کنترلکننده الکترونیکی، جایگزین براش و کموتاتور شدهاست؛ که فاز سیمپیچها را دائماً سوییچ میکند تا موتور را به گردش درآورد. کنترلگر توزیع قدرت «همزمان» (به انگلیسی: Synchronous) مشابهی را با یک مدار (حالت جامد؟) به جای سیستم براش و کموتاتور فراهم کرد. ارتباط موتور براشلس میتواند در سختافزار صورت پذیرد یا بهجای آن توسط افپیجیای (به انگلیسی: FPGA) اجرا شود. استفاده از افپیجیای انعطافپذیری و تواناییهایی را فراهم کردهاست که در موتورهای دیسی براش در دسترس نیست. همچون محدود کردن سرعت، عملکرد (Micro stepped) برای کنترل حرکت آرام یا مورد نظر و نگهداشتن گشتاور هنگام سکون.
موتورهای براشلس در تبدیل برق به توان مکانیکی نسبت به موتورهای برسدار کارآمدترند. این پیشرفت تاحد زیادی به خاطر تعریف سرعت موتور توسط فرکانسی است که الکتریسیته سوییچ میشود، نه ولتاژ(؟). دستآوردهای بیشتر به خاطر نبودن براش و در نتیجه کاهش تلفات اصطکاک است.بیشترین کارایی پیشرفته در حالتهای بدون بار و کم بار منحنی عملکرد موتور است. تحت بارهای مکانیکی بالا، موتورهای براشلس و موتورهای باکیفیت براش در کارایی غیرقابل مقایسهاند. محیطها و نیازمندیها در حالتهایی که تولیدکنندهها از موتورهای براشلس دیسی استفاده میکنند، شامل عملکردهای بدون نگهداری، سرعتهای بالا، و عملکردهایی که در آنها جرقه مخاطرهانگیز است (مانند محیطهای قابل انفجار)، یا ممکن است به دستگاههایی که نسبت به برق حساس هستند اثر بگذارد.
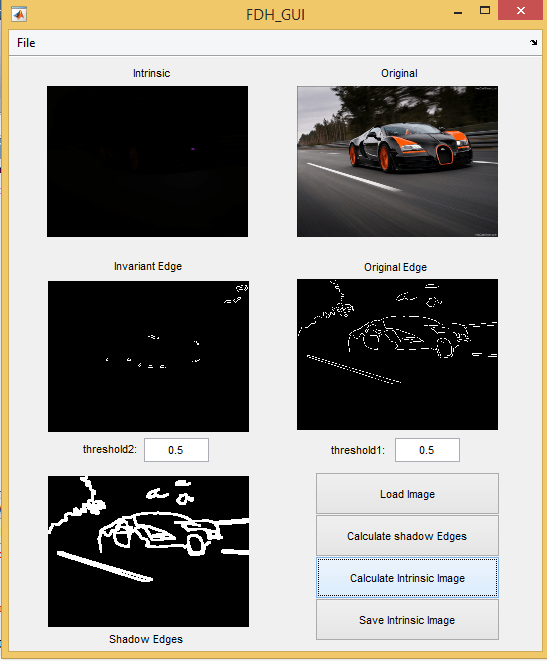
خروجی برنامه:
شبیه سازی ،موتور bldc، تغییر پارامتر موتور،داکیومنت،انجام پروژه متلب
لطفاً براي ارسال دیدگاه، ابتدا وارد حساب كاربري خود بشويد