تیون کردن کنترلر PID با کمک الگوریتم ذرات PSO در متلب
تیون کردن کنترلر PID با کمک الگوریتم ذرات PSO در متلب :پروژه متلب
پروژه متلب
بررسی سابقه موضوع طراحی کنترل کننده
پروژه متلب روش های دیگری جهت تعیین پارامترهای کنترل کننده وجود دارد که از آن جمله می توان به زیگلر نیکولز اشاره نمود.
لازم به توضیح است در این تحقیق از روشهای سیستماتیک خودداری گردیده و بر اساس الگوریتم های رقابتی و انبوه ذرات این تحقیق صورت پذیرفته است.
روش های دیگری چون گرید سرچ بعلت زمان بر بودن منتفی می باشد.
طراحی کنترل کننده PID با استفاده از الگوریتم ژنتیک GA و الگوریتم انبوه ذرات PSO
فرضیات اولیه
الف- چرا ما بدنبال روشهای غیر سیستماتیک جهت تعیین پارامترهای PIDمی گردیم؟
ب- آیا الگوریتم های تکاملی جهت حل اینگونه مسایل مفید می باشند؟چرا؟
ج – آیا این روش قابل ارتقا بوده و به طرق دیگر نیز قابل پیاده سازی می باشد؟
در اینگونه مسایل راه حل قطعی جهت رسیدن به جواب از طریق سیستماتیک وجود ندارد، اما تا حدودی ما را به آن نزدیک می کند،پس از نزدیک شدن به پاسخ باید به صورت سعی و خطا نسبت به بهبود جواب از طریق شهودی اقدام نمود.(روش زیگلرنیکولز)
اما الگوریتم های تکاملی بدون نیاز به روابط ریاضی و فرمول اقدام به حل مسایل در مدت زمان کوتاه می نمایند.
این گونه از روش ها قابل ارتقا هستند: مانند GA-PSO-ACOو… که روز به روز ارتقا و رفته رفته کشف گردیده اند.(مثالی از بحث ارتقا در فضای سرچ PSO برای درک بهتر ذکرخواهد گردید.)
طراحی کنترل کننده PID با استفاده از الگوریتم ژنتیک GA و الگوریتم انبوه ذرات PSO
PSO(Particle Swarm Optimazation)
پروژه متلب درسال ۱۹۹۵ توسط جیمزکندی و راسل ابرهارت معرفی گردید. PSOروش بهینه سازی
آنها درابتدا قصد داشتند که با بهره گیری از مدل های اجتماعی و روابط موجود اجتماعی،نوعی از هوش محاسباتی را بوجود بیاورندکه به توانایی های فردی ویژه نیازی نداشته باشد. کار آنان ،منجر به ایجاد الگوریتمی
شد.PSO قوی برای بهینه سازی ،بنام الگوریتم بهینه سازی ذرات یا
این روش از عملکرد دسته جمعی گروههای حیوانات مانند پرندگان و ماهی ها اقتباس شده است.
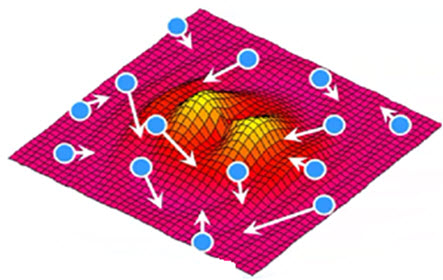
عملکرد انبوه ذرات
فضای جستجو(سه بعدی)
X(t) موقعیت ذره
V(t) سرعت ذره
XLbest(t) بهترین موقعیت هرذره
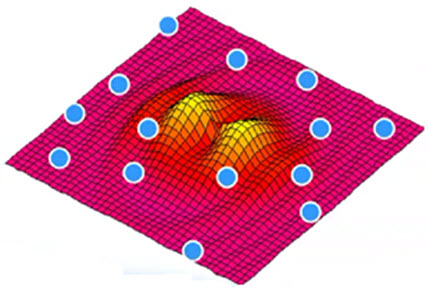
X(t) موقعیت ذره
V(t) سرعت ذره
Xlbest(t) بهترین موقعیت هرذره
Xgbest(t)درجمعیت بهترین موقعیت هرذره
طراحی کنترل کننده PID با استفاده از الگوریتم ژنتیک GA و الگوریتم انبوه ذرات PSO
فرمول و الگوریتم کار مربوط به PSO
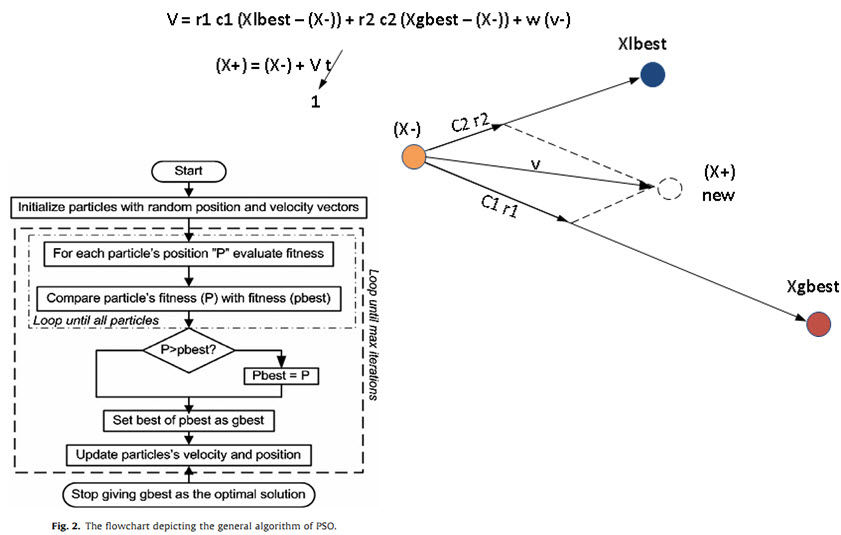
کار الگوریتم انبوه ذرات اقتباس شده از حرکت جمعی و گروهی موجودات می باشد.
Particle swarm optimization (PSO) is a population based stochastic optimization technique developed by Dr. Eberhart and
Dr. Kennedy in 1995, inspired by social behavior of bird flocking or fish schooling.
مراحل کار PSO برای تعیین ضرایب در این تحقیق
- تشکیل یک ماتریس ۶*۷۲۹(با توجه به یک مقاله انگلیسی که ذکر کرده است بهترین راه سرچ فضا تقسیم بندی آن می باشد، این جانب با توجه به داشتن ۶ ذره –بعد- اقدام به تقسیم بندی هر بعد به سه قسمت نموده ام ودر مجموع ۷۲۹فضا داریم که یک ذره از عمد برای سرچ بهتر فضا در داخل هرفضا قرار داده ایم.
۶^۳=۷۲۹
- پروژه متلب تعیین میزان برازندگی در تابع هزینه(قرار دادن پارتیکل های ۶ بعدی در تابع هزینه)
- بدست آوردن بهترین (کمترین) هزینه -G global best(بهترین نفر گروه)
- آپدیت سرعت بر اساس فرول مربوطه
- آپدیت موقعیت
- تکرار این روند تا طی شدن یکی از شرایط توقف (در این تحقیق طی شدن ۲۰ مرحله در نظر گرفته شده است)
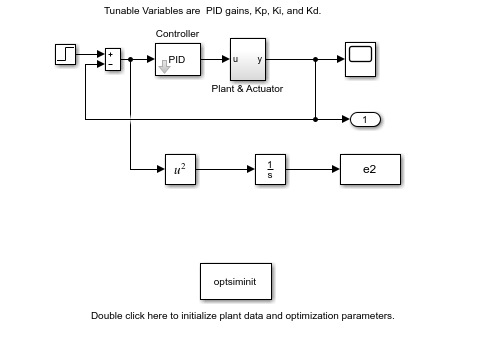
پروژه متلب :
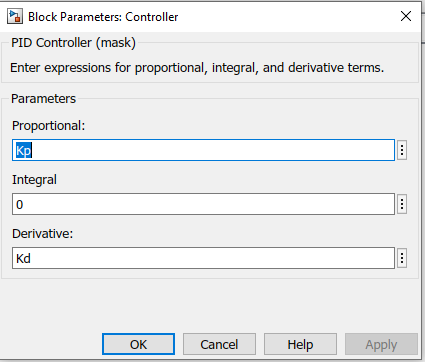
کنترلکننده پیآیدی

پروژه متلب اثر تغییر پارامترهای مختلف یک کنترلکننده PID ایدهآل روی پاسخ پله یک سیستم خطی. ضریب Kp سرعت سیستم را افزایش میدهد و خطای حالت دائم را تا حدودی کاهش میدهد (اما صفر نمیکند). افزودن جمله انتگرالی (ضریب Ki) خطای حالت دائم را صفر میکند، اما مقدار زیادی نوسانات ناخواسته (overshoot) به پاسخ گذرا اضافه مینماید. جمله مشتقی (Kd) نوسانات پاسخ گذرا را تضعیف کرده و پاسخ پله را به شکل پله ایدهآل نزدیک مینماید.
پروژه متلب کنترلکننده پیآیدی (به انگلیسی: proportional–integral–derivative controller (PID controller)) از رایجترین نمونههای الگوریتم کنترل بازخوردی است که در بسیاری از فرایندهای کنترلی نظیر کنترل سرعت موتور DC، کنترل فشار، کنترل دما و… کاربرد دارد. کنترلکننده PID مقدار «خطا» بین خروجی فرایند و مقدار ورودی مطلوب (setpoint) محاسبه میکند. هدف کنترلکننده، به حداقل رساندن خطا با تنظیم ورودیهای کنترل فرایند است.
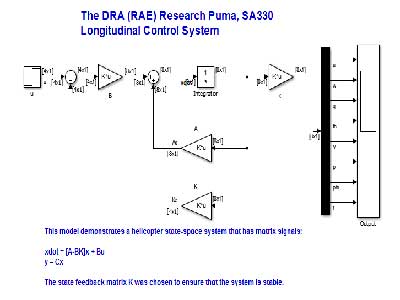
عملکرد

بلوک دیاگرام یک کنترلر PID
پروژه متلب PID از سه قسمت مجزا به نامهای Proportional (تناسبی)،Integral (انتگرالگیر) و Derivative (مشتقگیر) تشکیل شده که هر کدام از آنها سیگنال خطا را به عنوان ورودی گرفته و عملیاتی را روی ان انجام میدهند و در نهایت خروجی شان با هم جمع میشود. خروجی این مجموعه که همان خروجی کنترلکننده PID است برای اصلاح خطا (error) به سیستم فرستاده میشود.
فرمول استاندارد PID به فرم زیر است:
- {\displaystyle \mathrm {Output(t)} =K_{p}\left(\,{e(t)}+{\frac {1}{T_{i}}}\int _{0}^{t}{e(\tau )}\,{d\tau }+T_{d}{\frac {de}{dt}}\right)}

بنابراین تابع تبدیل یک کنترلکننده PID به صورت زیر درمیآید:
{\displaystyle G_{c}=K_{p}+{\frac {K_{i}}{s}}+K_{d}s}

پروژه متلب در بسیاری از کنترلکنندهها به علت حساسیت عبارتِ مشتق نسبت به نویز و دشواری اجرا، از آن صرف نظر و کنترل را به صورت PI پیادهسازی میکنند. سیگنال {\displaystyle u(t)} (خروجی PID) بر اساس نسبتی از خطای کنونی سیستم (عملکرد حاضر)، به اضافه مجموع خطاهای سیستم (رفتار گذشته)، به اضافه مشتق خطای کنونی (تخمین خطی رفتار آینده) محاسبه میشود و برای اصلاح خطا به سیستم اعمال میگردد. ضرایب {\displaystyle K}، {\displaystyle T_{i}} و {\displaystyle T_{d}} نیز میتوانند با روشهای شناخته شدهای مانند تابع انتقال به صورت بهینه محاسبه شوند، اگرچه در کاربردهای عملی، بهطور رضایت بخش میتوانند با آزمون و خطا و مشاهده رفتار سیستم بهطور تقریبی تعیین گردند




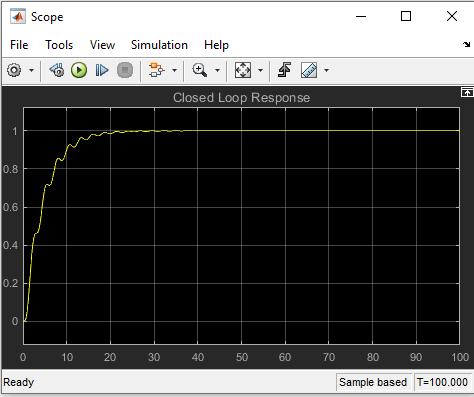
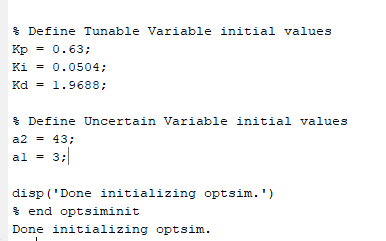
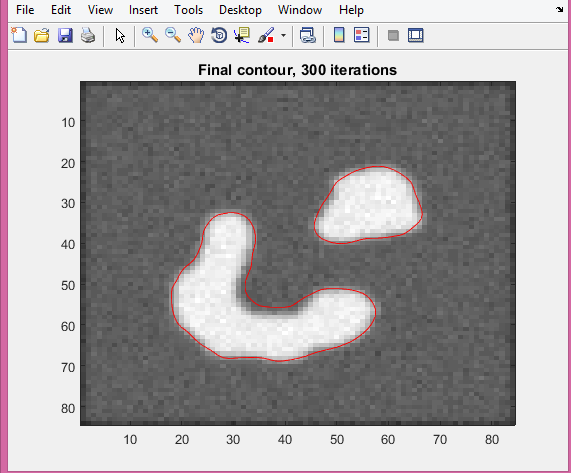
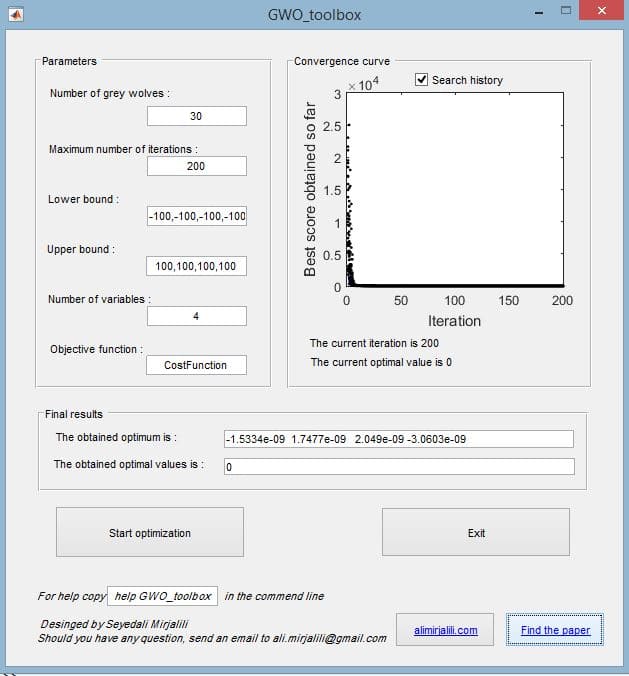
خروجی متلب :
لطفاً براي ارسال دیدگاه، ابتدا وارد حساب كاربري خود بشويد