ZIP

100,000 تومان
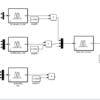
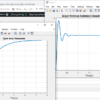
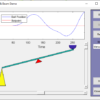
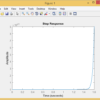
مینیمم کردن خطای پرواز هواپیما با استفاده از فیلتر کالمن در متلب
مینیمم کردن خطای پرواز هواپیما با استفاده از فیلتر کالمن شبیه سازی در متلب : فیلتر کالمن یک فیلتر بازگشتی کارامد است که حالت یک سیستم پویا را از یک سری اندازه گیریهای همراه با خطا بر آورد میکند. به همراه یک تنظیم کننده خطی مرتبه دوم (linear-quadratic regulator -LQR) فیلتر کالمن مسائل Gaussian control خطی مرتبه دوم (linear-quadratic-Gaussian control – LQG) را حل میکند. فیلتر کالمن ، LQR و LQG راه [...]
ادامه مطلب
تاریخ : 27 / سپتامبر / 2019 بازدید : 2070 نویسنده : mrk kiani