شبیه سازی راه اندازی موتور آسنکرون به روش راه اندازی نرم در متلب
شبیه سازی راه اندازی موتور آسنکرون به روش راه اندازی نرم در متلب
موتور های آسنکرون موتور هایی هستند که سرعت چرخش روتور با سرعت میدان مغناطیسی ایجاد شده در استاتور فرق می کند و این تفاوت سرعت چرخش روتور می تواند کمتر و یا بیشتر از سرعت میدان مغناطیسی ایجاد شده در روتور باشد به همین دلیل این نوع از الکتروموتور بیشترین میزان استفاده در صنایع و لوازم را دارد.
انواع موتور های آسنکرون
- موتور های آسنکرون با روتور سیم پیچی شده یا اسلیپ رینگ
- موتور های آسنکرون با روتور قفس سنجابی
به طور کلی الکتروموتور های آسنکرون دارای ویژگی هایی هستند که باعث شده است تا این حد در صنعت مورد استفاده واقع شوند که در ادامه به آن ویژگی های اصلی و مهم می پردازیم.
ویژگی های اصلی موتور های آسنکرون
- این موتور ها دارای اجزای کمی هستند و ساختمان ساده ای دارند.
- قابلیت تحمل میزان بالایی بار را دارند.
- با وجود تحمل میزان بالایی از بار این موتور ها می توانند سرعت چرخش خود را حفظ کنند.
- راه اندازی و نگهداری این موتور ها آسان است.
حال که با انواع و ویژگی های اصلی موتور های آسنکرون آشنا شدید قصد داریم تا به هرکدام از دسته های این دسته بندی بپردازیم:
موتور های آسنکرون با روتور سیم پیچی شده (اسلیپ رینگ)
این نوع از الکتروموتورها دارای روتور سیم پیچی شده (حلقه لرزان) هستند. استاتور موجود در این نوع از موتور ها مانند نوع دیگر دسته بندی موتور های آسنکرون از نوع قفس سنجابی است اما دارای مقداری تفاوت هستند و این تفاوت مربوط به یک سری از پیچه ها روی موتور است که دارای حالت مدار کوتاه نمی باشند و به رینگ های لغزان مختوم می شوند؛ علت استفاده از این پیچه ها این است که باعث افزایش قدرت خازن های خارجی و مقاومت های موجود در موتور می گردد.
لازم به ذکر است ویژگی مهم این موتور ها این است که جریان شروع به کار کمی را دارا می باشند و حداکثر گشتاور تولیدی این موتور ها با مقاومت روتور نسبت مستقیم دارند و مقاومت روتور را می توان با اضافه کردن مقاومت خارجی موجود در میان حلقه های لغزان کم می شود و می توان نتیجه گرفت که اگر به لغزش و گشتاور بیشتری در سرعت های پایین نیاز دارید از طریق این روش قابل دست یافتن است.
لازم به ذکر است هنگامی که موتور به حداکثر سرعت خود دست پیدا می کند خازن های موجود در مدار خارجی می توانند از مدار خارج گردند که باعث می شود به یک موتور القایی استاندارد دست پیدا کنید.
لازم به ذکر است برای تولید ۶۰ درصد گشتاور در حالت ثابت باید این پیچه ها را کوتاه کرد و آنگاه شروع به راه اندازی موتور کرد ولی باید توجه داشت که این روش باعث عبور جریان بالایی از موتور در حالت توقف می باشد و به دلیل عبور جریان بالا در موتور اصولا از این روش استفاده نمی شود اما اگر بخواهید متعادل کردن سرعت گشتاور می توان مقاومت های موجود در روتور را تغییر داد و این روش به عنوان روشی جایگزین استفاده می گردد.
ویژگی های موتور آسنکرون سیم پیچی شده
- در هنگام راه اندازی گشتاور بالایی دارند.
- جریان مورد نیاز هنگام راه اندازی کمی نیاز دارند.
- سرعت این نوع از موتور ها در بار های مختلف تقریبا ثابت است.
- بار روی این موتور ها را می توان افزایش داد
راهانداز نرم (به انگلیسی: soft starter) دستگاهی است که همراه موتورهای جریان متناوب استفاده میشود تا به صورت موقت بار و گشتاور واردشده بر سیستم انتقال قدرت را در زمان راهاندازی موتور کاهش دهد. استفاده از راهاندازهای نرم باعث کاهش تنش مکانیکی وارد شده بر موتور و محور میشود و تنشهای الکترودینامیک واردشده بر کابلهای قدرت و شبکهٔ توزیع نیروی الکتریکی را کاهش میدهد و موجب بالارفتن طول عمر سامانه میگردد.
راهانداز نرم با کاهش دادن ولتاژ در زمان راهاندازی باعث کاهش گشتاور موتور القایی جریانمتناوب میشود. راهاندازهای نرم به صورت سری بین موتور و منبع تغذیه قرار میگیرند و با استفاده از فناوریهای حالت جامد جریان موتور و در نتیجه ولتاژ اعمالشده بر آن را کنترل میکنند. در تئوری، میتوان راهانداز نرم را درون اتصال مثلث موتوری که به صورت مثلث بسته شدهاست نیز به کار گرفت. راهاندازهای نرم دارای عملکرد توقف نرم نیز هستند که کاهش تدریجی گشتاور موتور را کنترل میکند.
از دیگر روشهای راهاندازی نرم میتوان به راهاندازی ستارهمثلث، استفاده از اتوترانسفورماتور و تغییر تعداد قطبهای موتور اشاره کرد. با این وجود با ظهور نیمههادیهای قدرت قابل اطمینان و اقتصادی، استفاده از راهاندازههای نرم الکترونیکی رو به افزایش است.
راهانداز نرم جایگزینی برای درایوهای سرعتمتغیر نیستند. راهانداز نرم شتاب را واپایی نمیکند
روش کار راهانداز نرم الکترونیکی
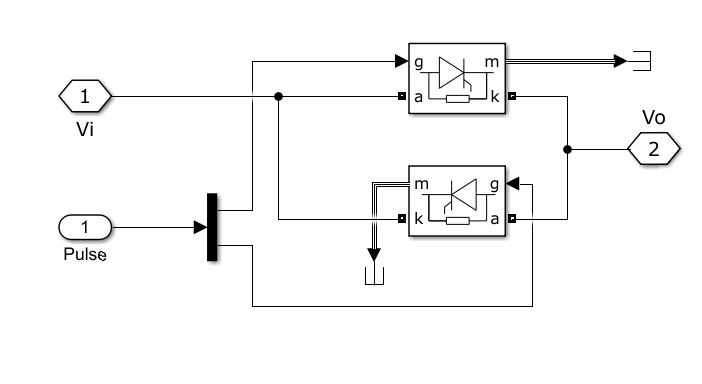
در بسیاری از راهاندازهای الکترونیکی با استفاده از شش تریستور در هنگام راهاندازی مانع رسیدن از بخش بزرگی از ولتاژ تغذیه به موتور میشوند و رفتهرفته ولتاژ را افزایش میدهند تا نهایتاً موتور به ولتاژ نامی خود برسد. این راهاندازها روشهایی برای تنظیم مدتزمان رسیدن به ولتاژ کامل و شیب افزایش ولتاژ را دارا هستند. بهطور معمول جریان راهاندازی به گونهای کنترل میشود که از سهبرابر جریان بار کامل تجاوز نکند و مدتزمانی راهاندازی نزدیک به ۳۰ ثانیه است. در برخی از طراحیها پس از اینکه موتور سرعت گرفت تریستورها را با استفاده از کنتاکتور از مدار خارج میکنند.
بارهایی که لختی بیشتری دارند نیاز به مدتزمان راهاندازی بیشتری خواهند داشت. راهاندازهای نرم عموماً دارای مشخصات نامی ۱۰ راهاندازی در ساعت با مدتزمان ۳۰ ثانیه هستند. باید توجه داشت که هر توقف نرم معادل یک راهاندازی نرم خواهد بود، بنابراین هر راهاندازی و توقف معادل دو بار راهاندازی است. همچنین ممکن است برخی راهاندازها حلقهبسته باشند که میتوانند برای حفاظت موتور در برابر اضافهجریان یا قطع تغذیه استفاده شوند. برخی از انواع راهانداز نرم ممکن است دارای کنارگذار درونی باشند.
راهاندازی با مقاومت متغیر در سیمپیچ روتور
این روش تنها در موتورهای القایی روتور-سیمبندیشده قابل استفاده است. مقاومت متغیر از راه حلقههای لغزش با سیمپیچ روتور سری میشود. پس از پایان راهاندازی میتوان مقاومت را از مدار خارج کرد. میزان مقاومت لازم برای راهاندازی به مقاومت داخلی روتور و راکتانس موتور (استاتور و روتور) بستگی دارد. با افزایش مقاومت جریان ورودی به موتور کاهش و ضریبتوان افزایش مییابد تا جایی که حداکثر گشتاور حاصل میشود، پس از آن جریان ورودی همچنان کاهش مییابد و ضریب توان افزایش مییابد ولی گشتاور کاهش پیدا خواهد کرد. این موتورها و در نتیجه این روش راهاندازی، کاربرد خانگی و تجاری ندارد زیرا کاربرد اصلی موتور روتورسیمبندی شده در فنها و پمپها است، بنابراین این روش راهاندازی تنها در سامانههای صنعتی مورد استفاده قرار میگیرد.
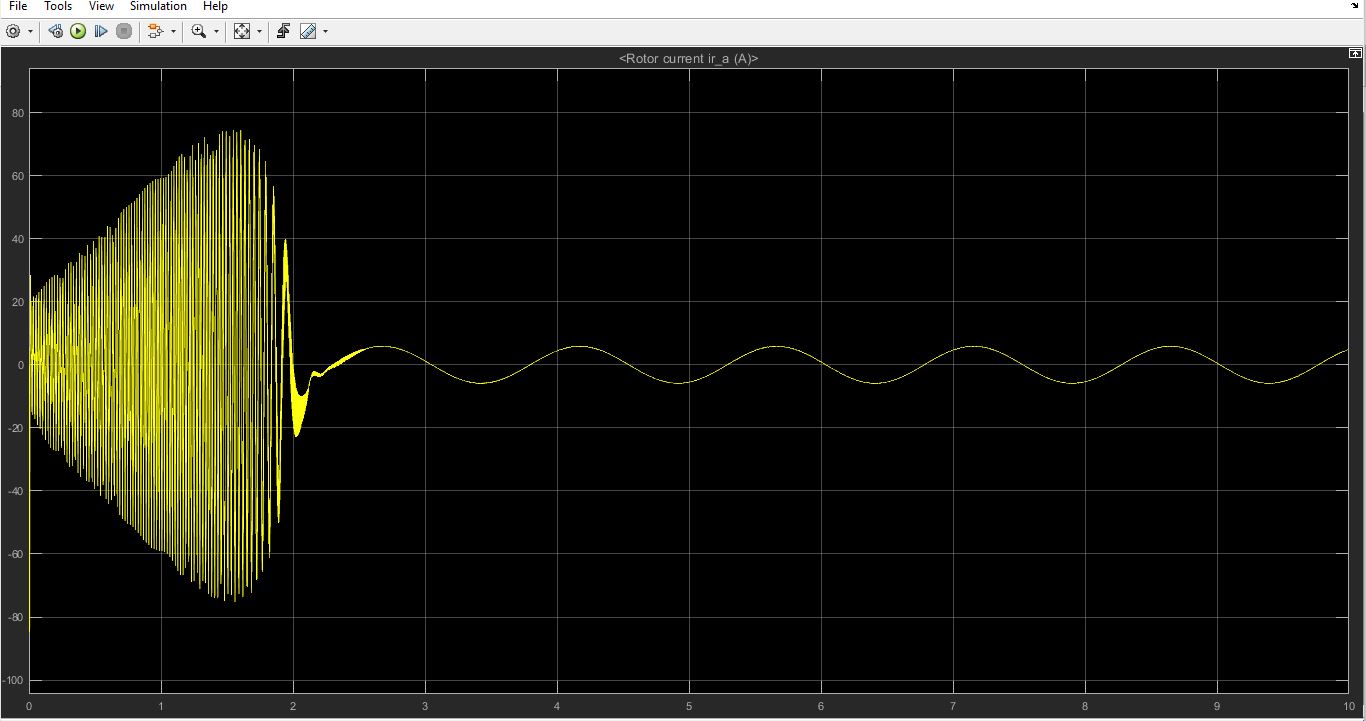
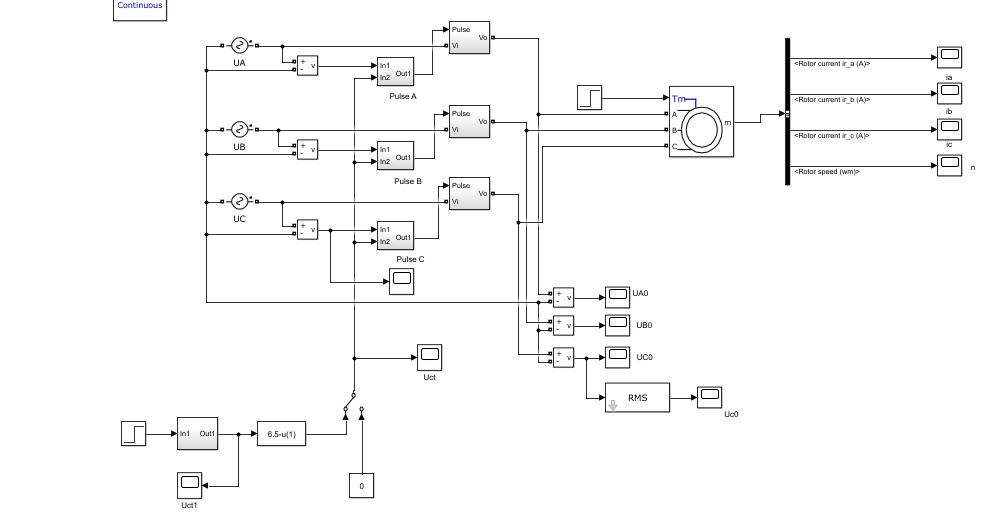
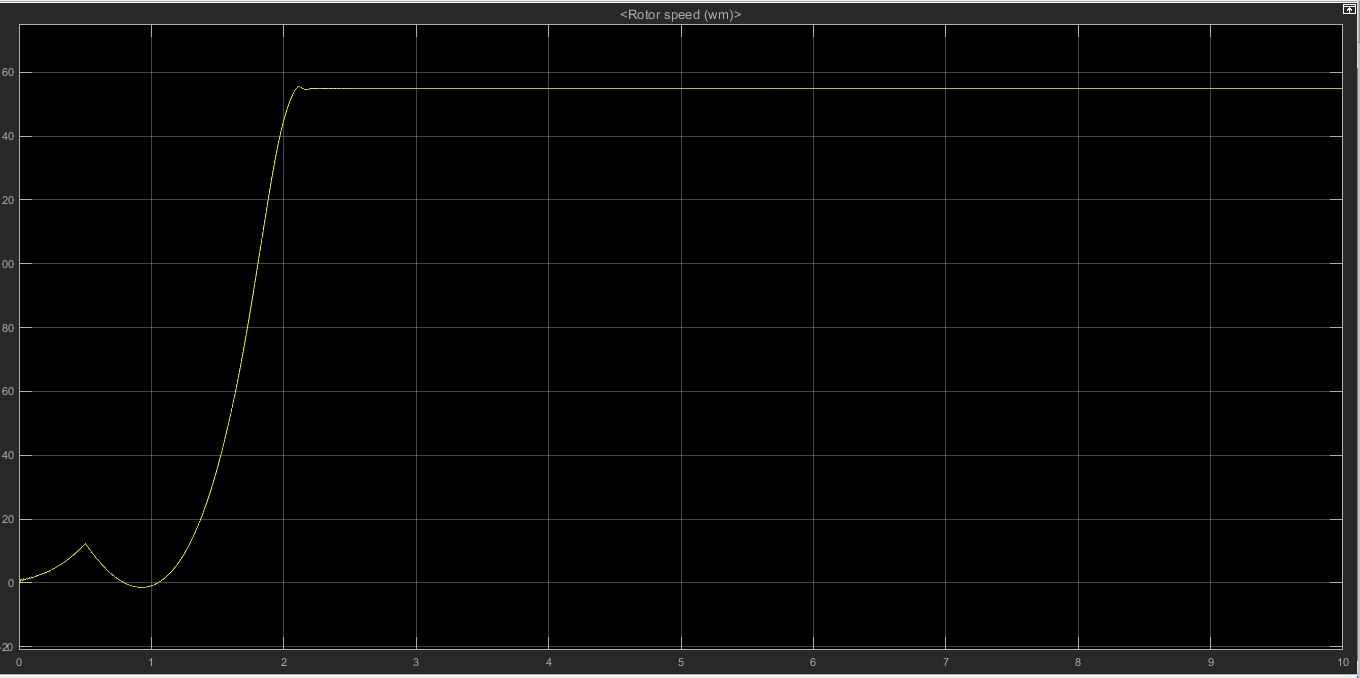
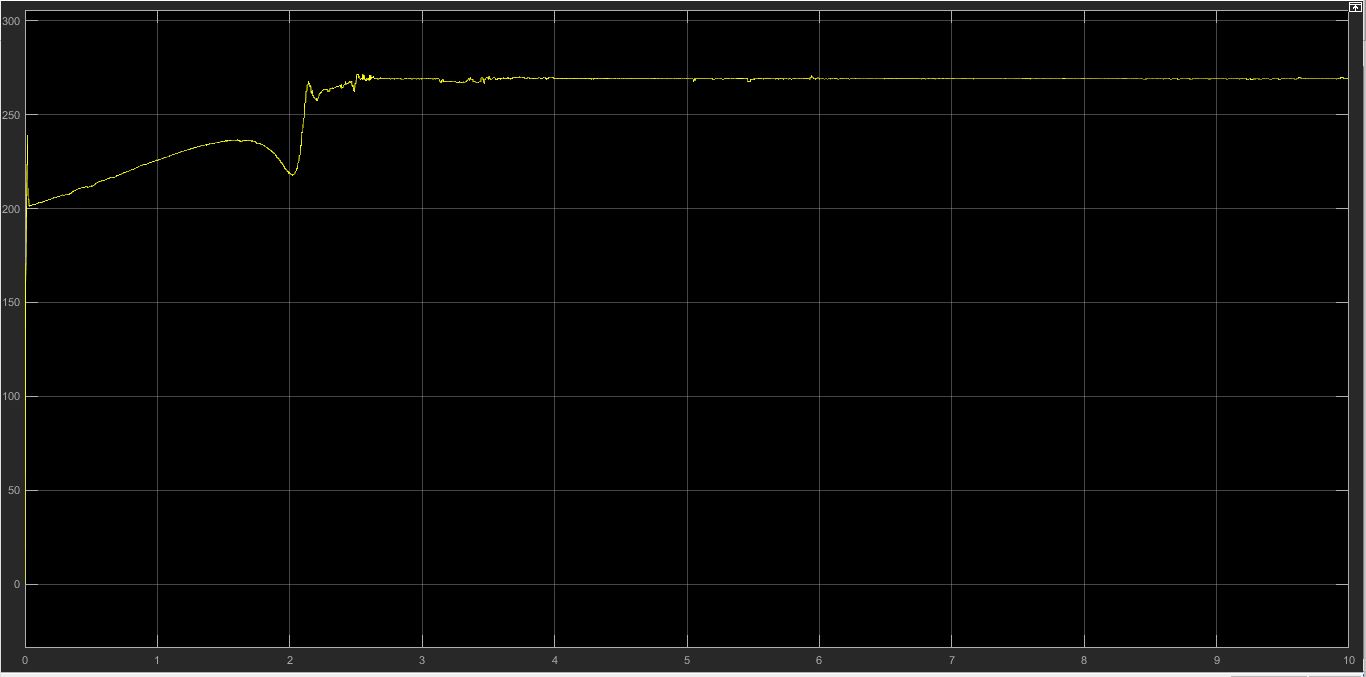
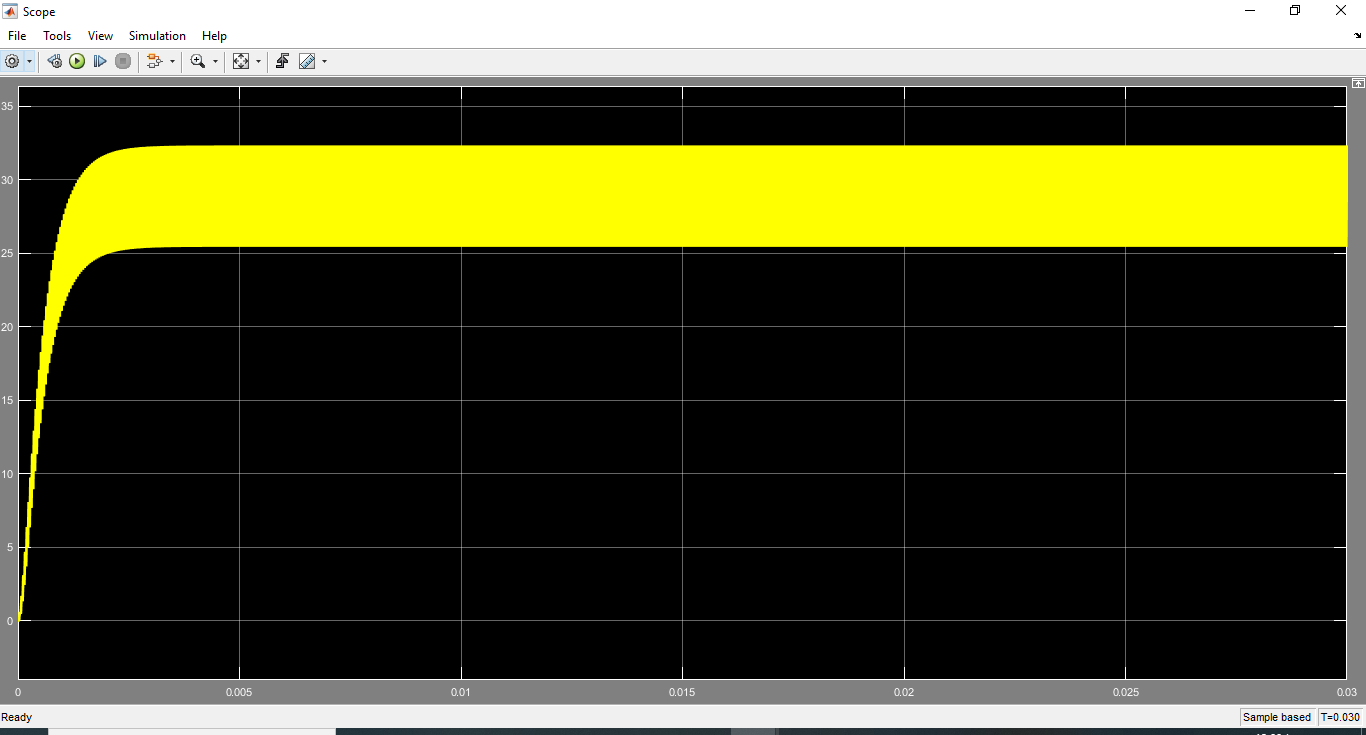
خروجی متلب :
لطفاً براي ارسال دیدگاه، ابتدا وارد حساب كاربري خود بشويد