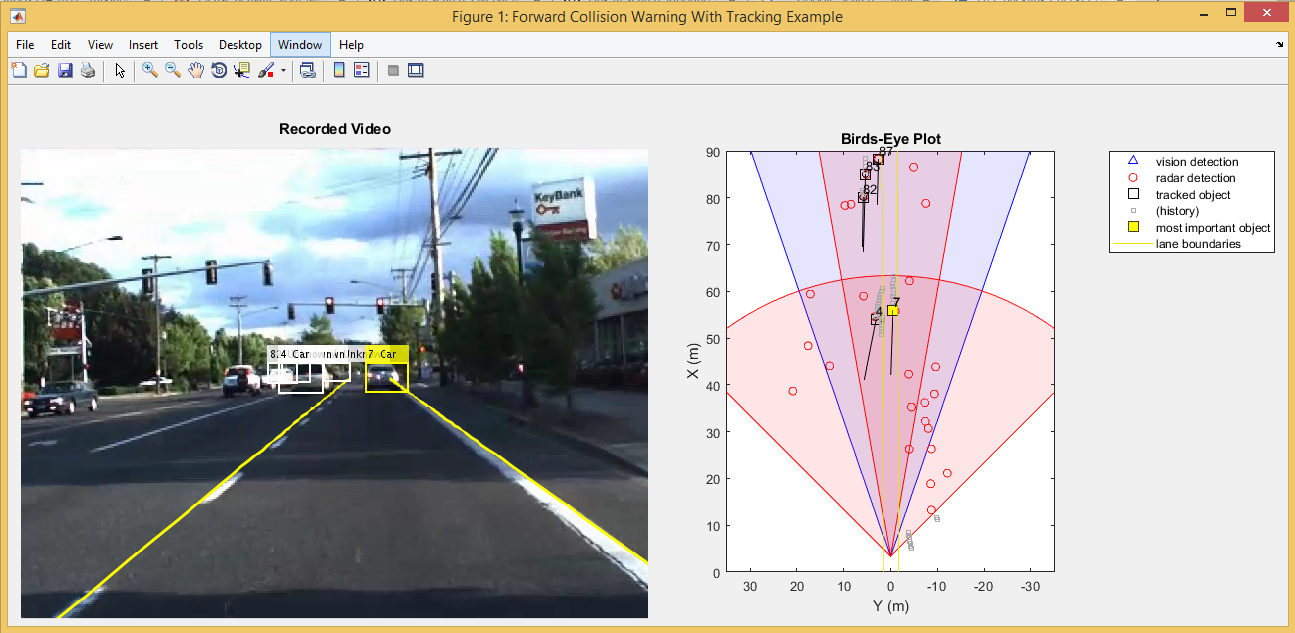
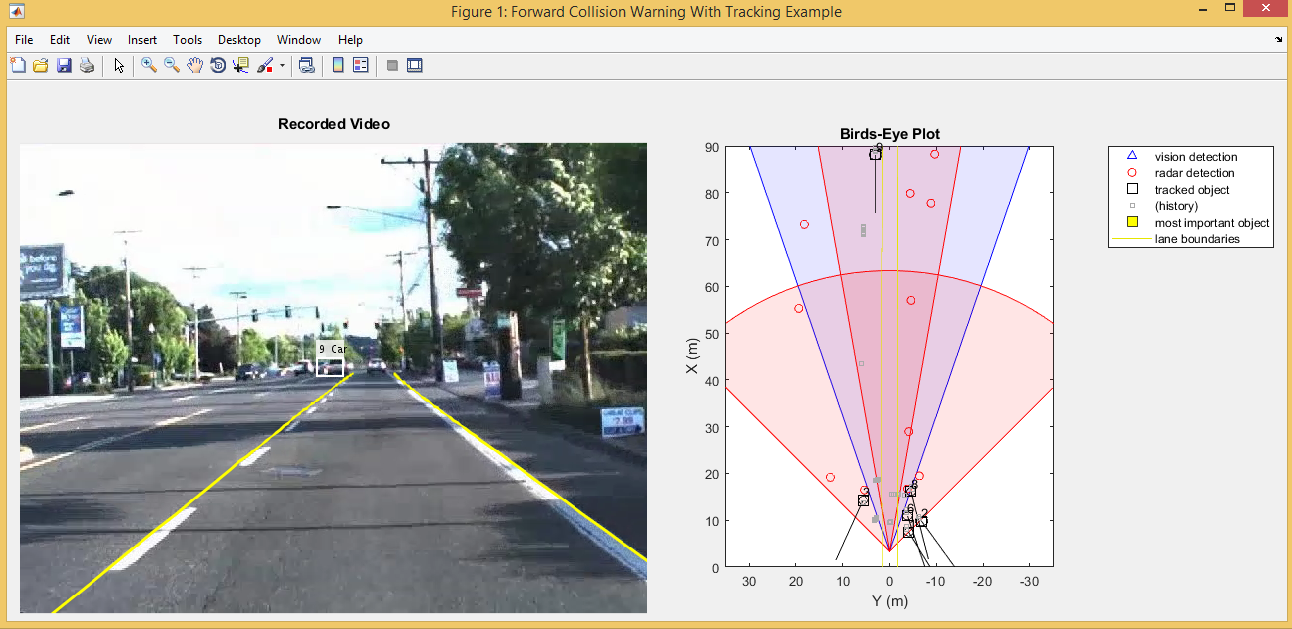
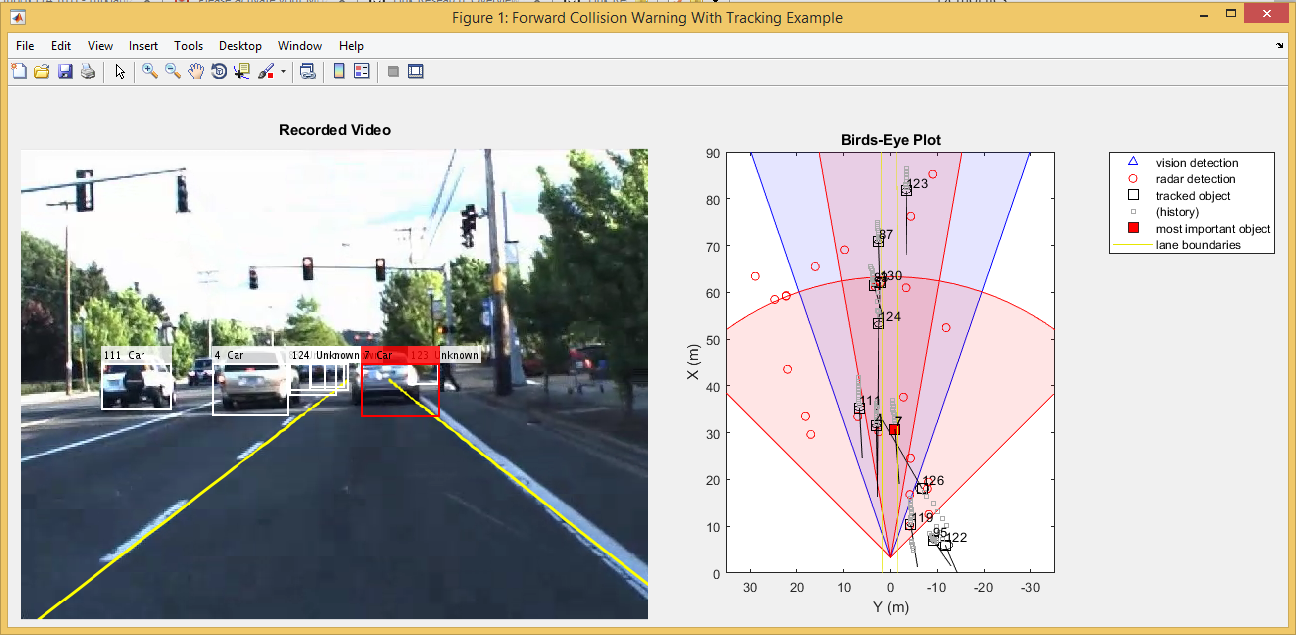
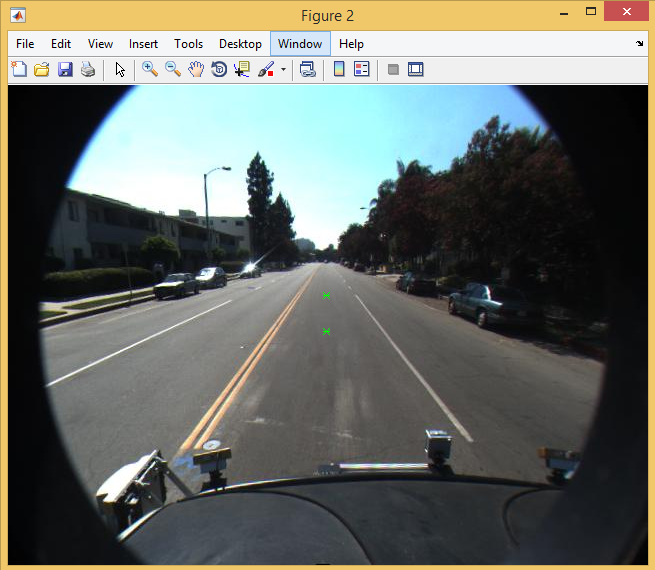
شبیه سازی دوربین ثبت تخلف پلیس در متلب با بینایی ماشین
شبیه سازی دوربین ثبت تخلف پلیس در متلب با بینایی ماشین :پروژه متلب
در این پروژه سیستم ثبت تخلف را کاملا شبیه سازی شده و پروژه کاملی می باشد.
پروژه متلب :
دوربین ثبت تخلف یا دوربین ترافیکی یک دوربین است که ممکن است کنار جاده، بالای دکل دسته دار یا روی یک خودروی مخصوص نصب شود تا بهاجرای قوانین و راحتتر کردن زندگی انسانها کمک کند.
بررسی های انجام شده در سراسر جهان نشان میدهد که به کارگیری دوربین های سرعت سنج منجر به کاهش ۱۱ به ۴۴ درصدی تصادفات شدید شده اند. وزارت حمل و نقل انگلستان تخمین زده است که دوربین ها منجر به کاهش ۲۲ درصدی مجروحیت های جزیی و کاهش ۴۲ درصدی مجروحیت های شدید و کشته ها در سایت های دوربین های ثبت تخلف شد ه ا ند. یک مجله تخصصی پزشکی بریتانیایی اخیراً گزارش داده است که دوربین های سرعت در کاهش تصادفات و صدمات در مجاورت آنها مؤثر هستند و استقرار گسترده تر آن ها را توصیه کرده است. همچنین مطالعه ای در LSE در سال ۲۰۱۷ نشان داد که “اضافه کردن ۱۰۰۰ دوربین دیگر به جاده های انگلیس می تواند سالانه ۱۹۰ نفر را نجات دهد ، تا ۱۱۳۰ تصادف را کاهش دهد و ۳۳۰ آسیب جدی را کاهش دهد.
تعریف سامانههای ثبت تخلف
پروژه متلب : تخلفات گوناگونی همانند تخلف سرعت لحظهای، تخلف سرعت میانگین، تخلف عبور از چراغ قرمز، تخلف پارک در محل غیرمجاز، تخلف عبور از مسیر خودروهای عمومی، تخلف رانندگی در مسیر اشتباه(ورود ممنوع)، تخلف سبقت غیرمجاز و … وجود دارند، که برای ثبت هر تخلف سامانه مناسب آن میبایست نصب گردد.
پارهای از تخلفات به صورت مقطعی اتفاق میافتند، نظیر سبقت غیرمجاز، و از آنجاییکه نمیتوان تمامی یک مسیر طولانی را تحت پوشش دوربین قرار داد، بنابراین ثبت در حین تخلف با مشکلات خاصی مواجه میباشد.
انواع تکنولوژی های سرعت سنجی
لوپ
پروژه متلب :جهت نصب این سامانهها، در ابتدا پوشش کف اتوبان برداشته شده و سپس حسگرهای مغناطیسی نصب میگردند. خروجی این حسگرها به سیستمهایی که شامل دوربین و کنترلر میباشد، اتصال مییابد. از جمله مشکلات این سامانهها عدم تشخیص سرعتهای بالا، هزینه برداشتن پوشش اتوبان، تعمیر و نگهداری دشوار حسگر و مشکلات جابجایی میباشد؛ بنابراین امروزه جز در موارد خاص همچون کنترل چراغهای راهنمایی و پارکینگها کاربرد دیگری ندارند. ایراد دیگر این سیستمها، الزام به نداشتن تغییرات حرکت خودروها در طول خط میباشد که متأسفانه در ایران به دلیل رانندگی غیر استاندارد و قرار نداشتن خودروها در بین خطوط (خصوصاً در ترافیکها) استفاده از این سیستمها دچار خطای بالا میشوند.
لیزر
پروژه متلب : برای کنترل سرعت یک خودرو در میان تعدادی خودرو دیگر، از سرعت سنج لیزری دستی استفاده میگردد و از این رو سرعت سنج لیزری جهت کنترل سرعت خودروها در مسیرهای پرتردد و خیابانها به کار میرود. از جمله مهمترین مشکلات این سیستم بروز خطرات جانی برای اپراتورها بخصوص در بزرگراههای کم تردد که در آن خودروها با سرعت زیاد در حال تردد هستند، میباشد. همچنین از آنجاییکه اصول کار سرعت سنجی در این سیستمها بر مبنای تشخیص فاصله زمانی بین دو بازگشت متوالی اشعههای لیزری است، بنابراین محل استقرار تجهیز حتماً میبایست ثابت باشد. یکی از مشکلات اصلی استفاده از لیزر، خطای کوسینوس زاویهٔ لیزر با جهت حرک خودرو میباشد. به این معنا که بهترین مکان برای استفاده از لیزر روبروی خودرو میباشد و هرچه با زاویه به خودرو نشانه رفته شود، سرعت محاسبه شده توسط لیزر در کوسینوس زاویه بین لیزر و حرکت ماشین ضرب میشود. (در بدترین حالت که عمود بر حرکت ماشین از بغل سرعت سنجیده شود، لیزر سرعت صفر را نشان میدهد – چرا که سرعت خودرو در راستای لیزر عمودی صفر است) اما این خطا همواره سبب می شود که سرعت خودرو کمتر از سرعت واقعی آن گزارش شود و از این لحاظ ریسک اعمال قانون ناعادلانه را ندارد.
از مزایای سرعت سنج لیزری برد زیاد آن است که بسته به نوع آن؛ تا بیش از یک کیلومتر می رسد.
رادار
پروژه متلب : سرعت سنج های راداری بر پایه پدیده دوپلر عمل می کنند. یک فرستنده، امواج الکترومغناطیسی را به هدف گسیل می دهد و این امواج پس از بر همکنش با هدف، بازتاب می شوند و گیرنده های در کنار ماژول فرستنده، امواج بازاب شده را دریافت می کند. با بررسی تغییر فرکانس امواج دریافتی به نسبت امواج گسیل شده، سرعت هدف محاسبه می شود.
بعصی از ماژول های رادار تنها قادر به سرعت سنجی یک هدف هستند در حالی که بعضی از ماژول های رادار با تکنولوژی جدید که با عنوان Multi Target شناخته می شوند، می توانند چند هدف را همزمان سرعت سنجی کنند.
علاوه بر این بعضی ماژول های رادار نسل جدید می توانند اهداف شناسایی شده را دنبال -Track- کنند و موقعیت و سرعت هدف را در هر لحظه گزارش کنند که به آن ها اصطلاحا Tracker می گویند.
ماژول رادار در ترافیک های متراکم قدرت تفکیک پذیری کمی دارد اما در ترافیک های روان توان تشخیص مناسبی دارند.
پردازش تصویر
تک دوربین
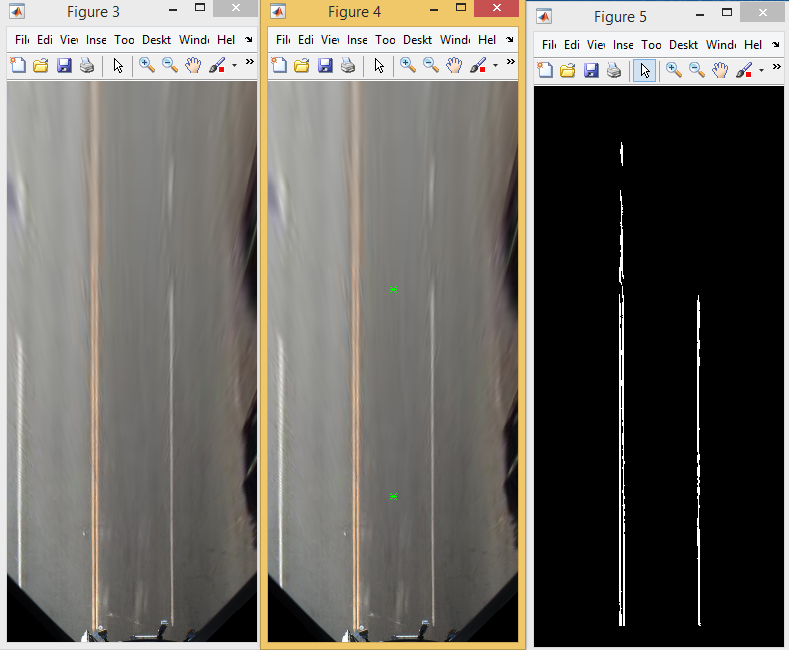
در این سیستم ها از تصویر پیاپی سنسور مریی و یا مادون قرمز جهت سرعت سنجی خودرو ها استفاده می شود. به این ترتیب که با دانستن فاصله زمانی دقیق بین دو فریم از تصویر، و استخراج فاصله جا به جا شده خودرو در بین دو فریم با استفاده از روش های پردازش تصویر، سرعت خودرو محاسبه می شود. دقت این روش به الگوریتم استفاده شده در تشخیص جا به جایی خودرو در تصویر و دقت سخت افزار در اندازه گیری زمان بین دو فریم است. برای مثال در مواردی که از تشخیص پلاک و جا به جایی آن در تصویر برای سرعت سنجی استفاده می شود، تفاوت ارتفاع نصب پلاک در خودرو های گوناگون (یک خودروی سواری و یک اتوبوس) می تواند سبب ایجاد عدم دقت سرعت سنجی شود. از مزایای این روش امکان سرعت سنجی همه خودروهای عبوری است.
دو دوربین (روش دو دیدی)
این سیستم ها مانند دو چشم انسان کار می کنند. اختلاف منظر دو چشم به ما امکان عمق یابی اشیا مشاهده شده را می دهد. در این روش از دو دوربین با فاصله ثابت استفاده می شود که اختلاف منظری با یکدیگر دارند. با پردازش تصویر هر یک از دوربین ها و تطبیق آنها با یکدیگر و با توجه به موقعیت دانسته دو دوربین به نسبت یکدیگر، عمق هر نقطه از تصویر طبق روابط ریاضی محاسبه می شود. این روش دقت بسیار بیشتری در تشخیص سرعت دارد و فارغ از شکل خودروهای عبوری می تواند همه خودروهای را سرعت سنجی کند. سرعت سنجی خودروهای بدون پلاک و تشخیص کلاس خودروی عبوری (خودروی سبک و یا خودروی سنگین) از مزایای این روش است.
کینکت از این تکنولوژی بهره می برد.
انواع سیستمهای ثبت تخلفات به لحاظ کاربرد
عبور از لاین خودروهای عمومی
این سیستم ها در مسیر خودروهای عمومی (برای مثال مسیر مخصوص تردد اتوبوس های شهری) قرار می گیرند و همه تردد ها را ثبت می کند. در صورتی که پلاک خودروی عبوری فاقد مجوز لازم باشد، آن خودرو به عنوان متخلف شناخته خواهد شد.
چراغ قرمز
این سیستم ها در تقاطع ها نصب می شوند و در صورتی که خودرو زمانی که چراغ قرمز است از تقاطع عبور کند برای آن جریمه در نظر خواهد گرفت. همچنین اگر خودرو بر روی خط عابر پیاده ایستاده باشد جریمه مربوطه برای آن ثبت خواهد شد.
سرعت لحظه ای
سرعت خودرو هنگام عبور از دوربین، ثبت می شود و در صورتی که بیش از حد مجاز باشد، تخلف سرعت ثبت خواهد شد. محدودیت این سیستم ها این است که رانندگان با دانستن محل نصب دوربین های سرعت سنج سرعت خود را در محدوده دوربین کاهش داده و پس از گذر از دوربین می توانند سرعت خود را افزایش دهند بدون اینکه جریمه شوند. کاهش سرعت در زیر دوربین های سرعت سنج خود بعضا سبب حادثه می شود.
سرعت متوسط
در این سیستم ها زمان عبور خودرو از سامانه ثبت تردد اول ثبت می شود. سامانه بعدی را به گونه ای قرار می دهند که خودرو به ناچار از آن نیز بگذرد و بنابراین زمان تردد خودرو در سامانه دوم هم ثبت می شود. با دانشته بودن فاصله بین دو سامانه، سرعت متوسط خودرو در میان دو سامانه محاسبه می شود. بنابراین حتی اگر خودرو در زیر دوربین ترمز کند و در بین دو سامانه با سرعت غیر مجاز به مسیر خود ادامه دهد، سرعت متوسط آن غیر مجاز بوده و برای آن تخلف سرعت متوسط ثبت می شود.
توقف ممنوع
این سامانه ها بر روی خودروهای گشتی نصب می شوند و پلاک خودروها و مکان پارک آنها را ثبت می کند و در صورتیکه خودرو در محل غیر مجاز پارک کرده باشد برای آن خودرو تخلف ثبت می شود.
ورود به محدوده طرح ترافیک
این سامانه ها در ورودی، خروجی . یا در میان محدوده های طرح ترافیک نصب می شوند و با ثبت همه ترددها، موجب ثبت تخلف برای خودروهای عبوری غیرمجاز می شود.
عوارض جاده ای
این سامانه ها در مسیر های شهری و بین شهری که برای آن ها عوارض در نظر گرفته شده نصب می شوند و در صورتی که خودرو از محل نصب دوربین عبور کند، برای آن عوارض در نظر گرفته می شود.
سیستم های چند منظوره
سامانه های چند منظوره، سامانه هایی هستند که توانایی ثبت همزمان چند تخلف همزمان را دارند. برای مثال در سال ۲۰۱۱ در فنلاند دوربینی تست شد که توانایی بررسی همزمان سرعت خودرو، فاصله طولی خودرو از خودروی جلویی، بیمه و عوارض را دارد.. برای مثال دیگر، دوربین هایی هستند که امکان بررسی همزمان تخلف چراغ قرمز، سرعت لحظه ای در تقاطع و تردد غیر مجاز در طرح ترافیک را دارا هستند. استفاده از سامانه های چند منظوره یکی از پایه های شهر هوشمند است.
خروجی متلب :

لطفاً براي ارسال دیدگاه، ابتدا وارد حساب كاربري خود بشويد