
شبیه سازی و اعمال کنترل فازی برای کشتی تانکر:انجام پروژه متلب
شبیه سازی و اعمال کنترل فازی برای کشتی تانکر:انجام پروژه متلب
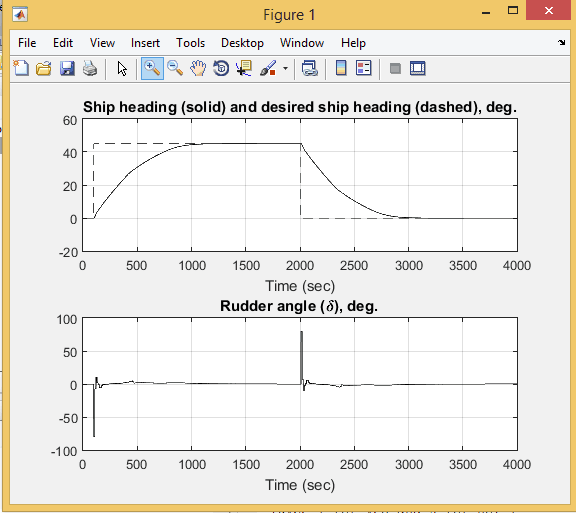
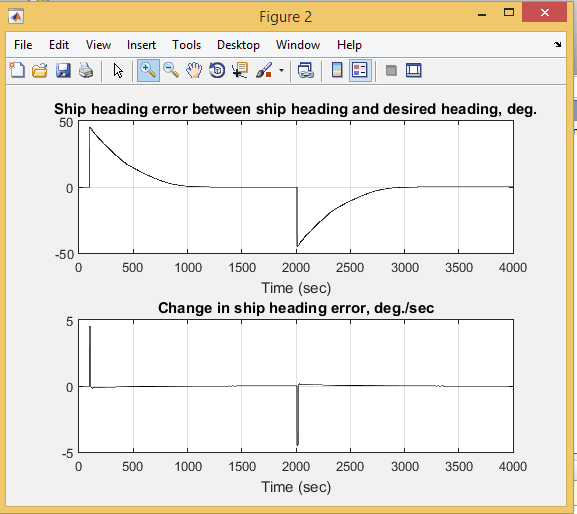
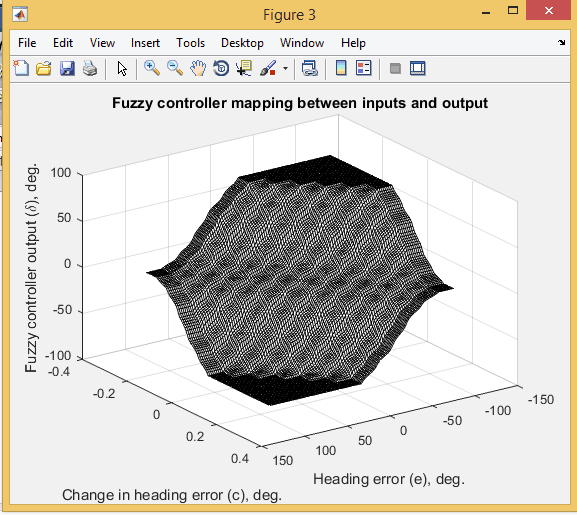
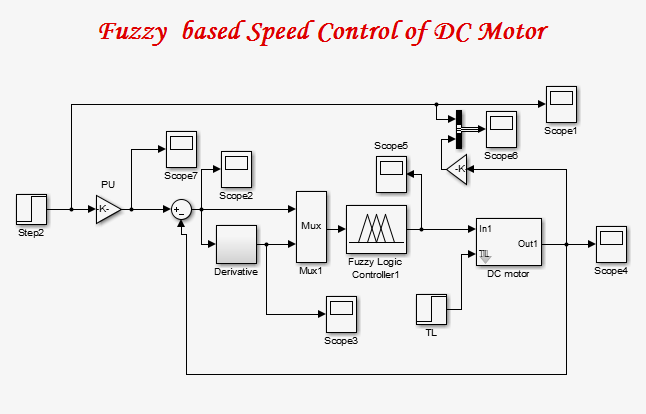
این برنامه یک سیستم کنترل فازی برای کشتی تانکر را شبیه سازی می کند. این برنامه یک کنترل کننده فازی با دو ورودی و خطای بالا آمدن کشتی و تغییر در خطای آن را دارا می باشد. خروجی کنترل کننده فازی نیز ورودی سکان هدایت کشتی است. (دلتا) ما می خواهیم بالا آمدن کشتی(psi) برای کشیدن ورودی مرجع بالا آمدن باشد(psi_r) . ما تانکر را به عنواند یک سیستمی زمان پیوسته که بوسیله کنترل کننده فازی، کنترل می شود و بر روی کامپیوتر دیجیتالی با نمونه برداری در محدوده T پیاده سازی می شود، را شبیه سازی کردیم.
این برنامه توضیح می دهد که:
۱-چگونه یک کنترل کننده فازی را برای یک سیستم تانکر کدنویسی نمائیم.
۲-چگونگی تیون کردن ورودی و خروجی کنترلر فازی را توضیح می دهد.
۳-چگونگی ایجاد تغییرات در شرایط مختلف را کدنویسی می کند.
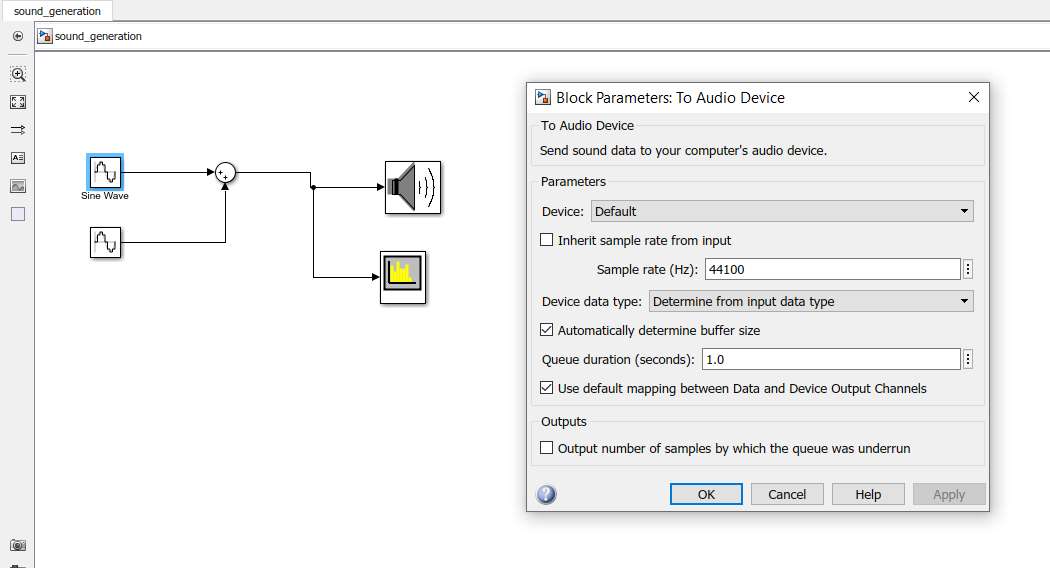
۴-چگونه نویز را کنترل کنیم
سالهای اخیر شاهد رشد سریع محبوبیت سیستمهای کنترل فازی در کاربردهای مهندسی بوده است . در این تحقیق ما یک محدوده گسترده ابزارهای تحلیل وطراحی سیستمهای کنترل فازی را برای حل مسائل مهندسی ، مقدمه سازی می کنیم . این فصل مفاهیم اساسی تحلیل و روندهای طراحی در این روش را معرفی می کند .
این فصل با مقدمه ای بر مدل فازی T-S آغاز می شود و سپس با روندهای ساختن این مدلها ، دنبال می شود . آنگاه طراحی یک کنترل کننده فازی بر اساس مدل با استفاده از ” جبران سازی گسترده موازی “ شرح داده شده است . ایده اصلی طراحی کنترل کننده ، استنتاج کردن هر قاعده کنترل برای جبران هر قاعده سیستم فازی است . روند طراحی بطور مفهومی ، ساده و طبیعی است
. در این فصل نشان داده شده که تحلیل های پایداری و مسائل طراحی کنترل ، می توانند به مسائل
LMI کاهش پیدا کنند . روش طراحی ، بوسیله کاربرد آن در مساله متعادل کردن یک آونگ وارونه روی گاری ، شرح داده شده است .
تمرکز این فصل روی مفاهیم اساسی روشهای تحلیل پایداری از طریق LMI است . بیشتر موارد پیشرفته در تحلیل و طراحی توسط LMI در فصل بعد خواهد آمد .
۱-۱- مدل فازی تاکاگی -سوگنو
روند طراحی ، با شرح یک فرآیند غیر خطی داده شده بوسیله مدل فازی T-S آغاز می شود
. مدل فازی پیشنهادی توسط تاکاگی و سوگنو بوسیله قواعد اگر-آنگاه فازی شرح داده شده است
که روابط ورودی -خروجی خطی محلی یک سیستم غیر خطی را نشان می دهد .خاصیت اصلی مدل فازی T-S ، هر قاعده بیان دینامیکهای محلی بوسیله یک مدل خطی سیستم است . مدل فازی نهائی سیستم بوسیله ترکیب فازی مدلهای خطی سیستم به دست آمده است . خواننده خواهد یافت که بعضی از سیستمهای دینامیکی غیر خطی می توانند توسط مدل فازی T-S نشان داده شوند . در حقیقت ، اثبات می شود که مدلهای فازی T-S تقریبهای عمومی هستند .
iامین قاعده مدلهای فازی T-S به شکل زیر است . اینجا CFS و DFS به ترتیب بر مدل فازی پیوسته ومدل فازی گسسته دلالت می کنند .
مقالات زیادی در زمینه مدل سازی فازی با استفاده از داده های ورودی -خروجی وجود دارد . این روند بر دو قسمت استوار است : شناسائی ساختار و شناسائی پارامترها . روش شناسائی برای مدل سازی فازی برای فرآیندهائی مناسب است که مدل سازی تحلیلی یا فیزیکی آنها یا غیر ممکن است و یا بسیار دشوار است . به عبارت دیگر ، مدلهای دینامیکی غیر خطی سیستم های مکانیکی به آسانی قابل حصول هستند . در این حالت ، روش دوم مدل سازی سیستم دینامیکی غیر خطی مناسب تر هستند . این روش از ایده ” ناحیه غیر خطی “ و ” تقریب محلی “ یا یک ترکیب از آنها برای ساختن مدلهای فازی استفاده می کند .
خروجی متلب :

لطفاً براي ارسال دیدگاه، ابتدا وارد حساب كاربري خود بشويد