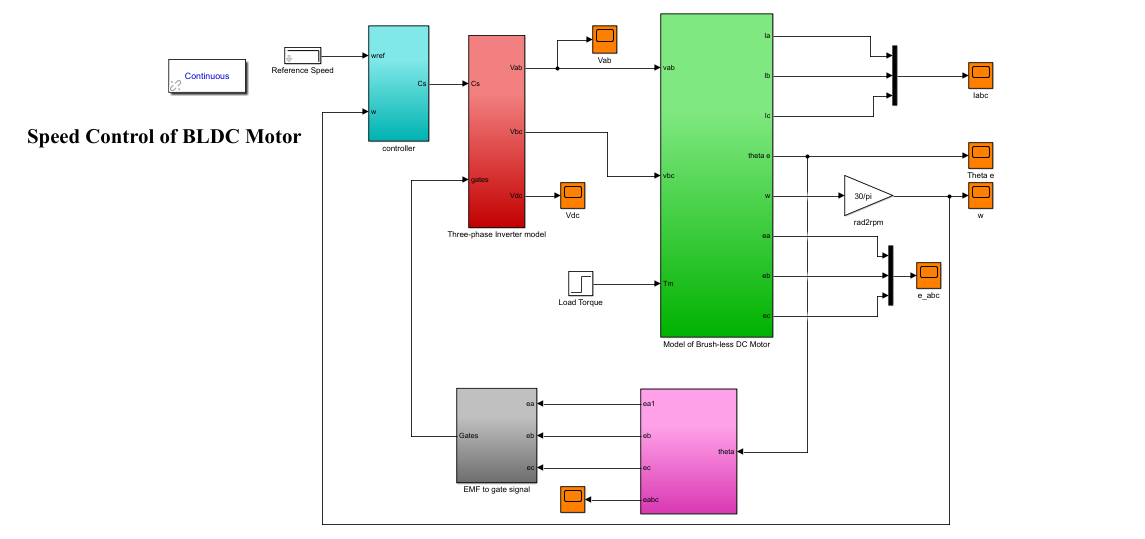
کنترل سرعت موتور DC بدون جاروبک در سیمولینک متلب
کنترل دور موتور DC بدون جاروبک در سیمولینک متلب :پروژه متلب
پروژه متلب :
موتورهاي جريان مستقيم بدون جاروبک BLDC1 به علت ويژگي هاي ارزنده اي که دارند، از جمله چگالي گشتاور بالا، ميزان صدا کم و … به صورت گسترده در صنعت مورد استفاده قرار مي گيرند. از آنجا که اين موتورها به صورت گسترده در مواردي که نياز به ريپل گشتاور کمي دارند مانند صنايع رباتيک ، کنترل توان الکتريکي و… مورد استفاده قرار مي گيرند، کاهش گشتاوردندانه اي در اين موتورها مورد توجه قرار گرفته است .
کاهش رپيل گشتاور تنها شامل کاهش گشتاور دندانه اي نمي باشند وتمامي انواع ريپل هاي گشتاور را شامل مي شود.اين کاهش ريپل بايد به گونه اي صورت گيرد که متوسط گشتاور مفيد کاهش قابل توجهي پيدا نکند و همچنين شکل موج و اندازه Back Emf نيز دچار تغيير زيادي نشود
واکنش بين دندانه هاي استاتور و آهنرباي دائم سبب ايجاد گشتاور دندانه اي مي شود. روش هاي متفاوتي براي کاهش اين گشتاور ارائه شده است . طراحي قوس قطب هاي مغناطيسي ، انحراف آهنرباهاي دائم رتور و يا شيار هاي استاتور، انحراف پله اي آهنرباها، استفاده از شيارهاي مصنوعي ، جابجايي مغناطيس هاي دائم ، استفاده از دهانه شيار مورب و … از جمله روش هاي مؤثر در اين زمينه مي باشند.
تمامي اين روش ها باعث کاهش گشتاور دندانه اي مي شوند اما بعضي از اين روش ها گشتاور اصلي را نيز کاهش مي دهندو برخي باعث پيچيده شدن ساختار مغناطيسي استاتور و رتور مي شود . همچنين تعدادي از اين روش ها باعث تأثير معکوس برروي اندازه back Emf مي شوند و مؤلفه هاي هارمونيکي مختلفي درآن ايجاد مي کنند.
موتورهاي DC راندمان بالايي دارند و به دليل مشخصات برجسته شان مي توان از آنها به عنوان سرو موتور استفاده نمود. تنها عيب اين موتورها نياز آنها به کموتاتور و جاروبک است که دائم در معرض فرسايش مي باشند و نياز به سرويس و نگهداري دارند. موتور هاي جريان مستقيم بدون جاروبک BLDC موتورهايي هستند که وظيفه کموتاتور و جاروبک در آنها بر عهده کليدهاي الکترونيکي مي باشد [١].
در يک موتور DC معمولي آرميچر در روي رتور و ميدان بر روي استاتور قرار دارد. ولي در موتور بدون جاروبک وضع به اين گونه نيست . بلکه ساختمان اين موتورها شباهت بسياري به موتورهاي AC سنکرون دارد. در اين موتورها آرميچر بر روي استاتور قرار دارد و ميدان از دو يا چند آهن ربا که روي رتور نصب مي شوند، تشکيل مي گردد. سيم پيچي اين نوع موتورها شبيه سيم پيچي موتورهاي AC چند فاز مي باشد و معمول ترين آنها داراي سيم پيچي سه فاز مي باشد . موتورهاي DC بدون جاروبک از نظر طرز تعيين وضعيت رتور با موتورهاي
AC تفاوت دارند. بدين منظور در اين موتورها از کليد الکترونيکي استفاده مي شود که سيگنال هاي تعيين وضعيت را توليد مي نمايند. عمومي ترين روش کنترل وضعيت روش هال مي باشد ولي بعضي از موتورها از آشکار سازهاي نوري هم استفاده مي نمايند.
اگر چه موتورهاي DC متداول و موتورهاي بدون جاروبک داراي مشخصه هاي ايستايي مشابهي ميباشند. اما در برخي جهات تفاوتهاي قابل ملاحظه اي با يکديگر دارند. زماني که موتورهاي الکتريکي مورد بررسي قرار ميگيرند اهميت سيم پيچها و کموتاسيون را نبايد از ياد برد. کموتاسيون فرايندي است که طي آن جريان DC
تبديل به جريان AC شده و سبب توزيع صحيح جريان در سيم پيچهاي آرميچر ميشود. در موتورهاي DC
پروژه متلب متداول عمل کموتاسيون توسط کموتاتور و جاروبک ها انجام ميگيرد در حاليکه در موتورهاي DC بدون جاروبک عمل کموتاسيون توسط نيمه هادي هايي نظير ترانزيستور انجام ميشود.
موتورهاي جريان مستقيم بدون جاروبک عليرغم تمام مزاياي موجود داراي مشکلاتي نيز مي باشند. يکي از عمده ترين مشکلات اين نوع موتورها گشتاوردندانه اي مي باشد که باعث ايجاد لرزش در موتورها و همچنين توليد سرعت متغيير در آنها مي شود. گشتاور دندانه اي در اثر عکس العمل بين آهنرباي دائم رتور و دندانه هاي استاتور به وجود مي آيد و آن را به صورت نسبت تغيير انرژي در فاصله هوايي به تغيير زاويه رتور نشان مي دهند.
پروژه متلب :
ترکيب شيار به قطب بايد از همان ابتدا و با توجه به ديگر عوامل انتخاب شود تا باعث کاهش مؤثر گشتاور دندانه اي شود. علاوه بر ترکيب شيار به قطب در يک موتور مشخص براي کاهش گشتاور دندانه اي عوامل زير را نيز بايد در نظر گرفت
- شکل آهنربا و روش مغناطيس کردن آن
- دهانه شيار در ورق هاي استاتور
- يکنواخت بودن ورق هاي استاتور
- استفاده از آهن نرم در بدنه و …
- نامتقارن بودن رتور و تغيير فاصله هوابي
مواردي که در بالا ذکر شد برروي گشتاور دندانه اي تأثير دارند و بايد به دقت مورد توجه قرار گيرند .
١.٣.١. شکل آهنربا و روش مغناطيس کردن آن
پروژه متلب آهنربا هاي دائمي که روي رتور نصب مي شوند مي توانند داراي شکل هاي مختلفي از جمله :-surface (parallel)SP،bread-loaf)BL( يا (Surface-Radial)SR باشند [۵]. اين آهنرباها مي توانند در جهت هاي موازي يا دايره اي مغناطيس شوند. در شکل ٢-١ نمودار گشتاورگير يک موتور ٢٧ شيار–٦ قطب براي انواع مختلف شکل هاي آهنرباها و روش هاي مختلف مغناطيس شدن نشان داده شده است . مقدار پيک تاپيک گشتاور دندانه اي هنگامي که از روش مغناطيس کنندگي شعاعي استفاده مي کنيم نسبت به روش مغناطيس کنندگي موازي در رتورهاي SP حدود ٣٠ % افزايش مي يابد هر چه تعداد قطب ها در يک موتور يکسان افزايش يابد تأثير روش هاي مختلف مغناطيس کنندگي برروي اندازه گشتاور دندانه اي کاهش مي يابد.
پروژه متلب در عمل ، قطب هاي مغناطيسي را نمي توان در اندازه دقيق ساخت و در جاي مناسب قرار دارد. براي يک موتور بايد توجه داشت که جابجايي آهنرباها باعث مي شود که CPMR گشتاور دندانه اي برابر با تعداد شيارها شود و همچنين شکل ۴-١ تأثير مقدار اين جابجايي برروي مقدار پيک تا پيک گشتاور دندانه اي را نشان مي دهد.
زاويه جابجايي را از طريق محاسبه مجموع زواياي جابجايي هر يک از قطب ها بدست مي آورند. مشاهده مي شود که دقت در قرار دادن آهنرباها تأثير مهمي بر کاهش گشتاور دندانه اي دارد .
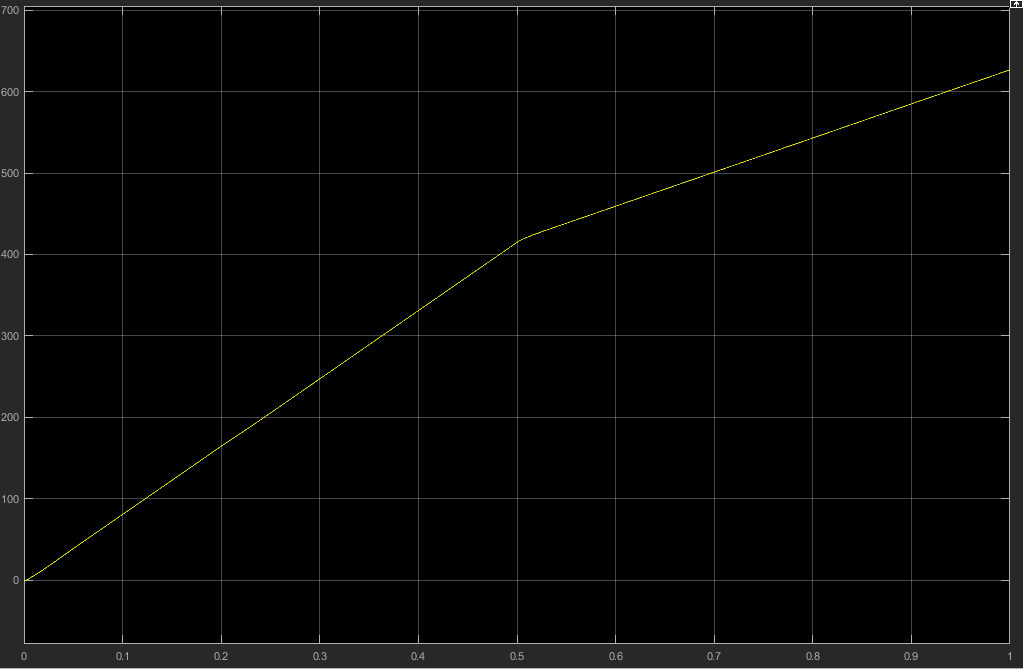
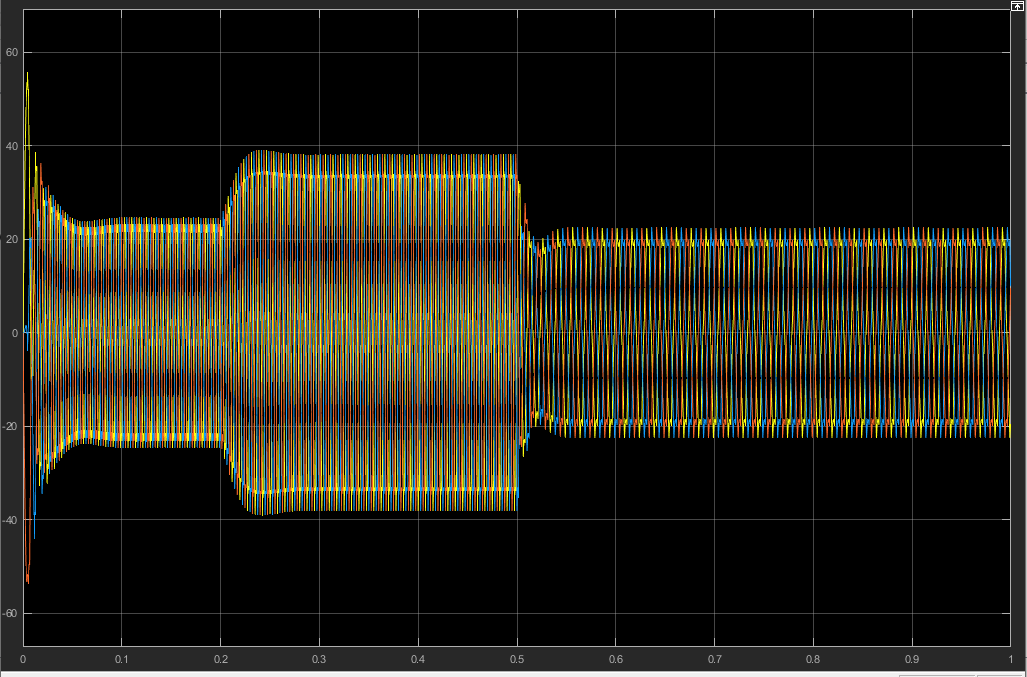
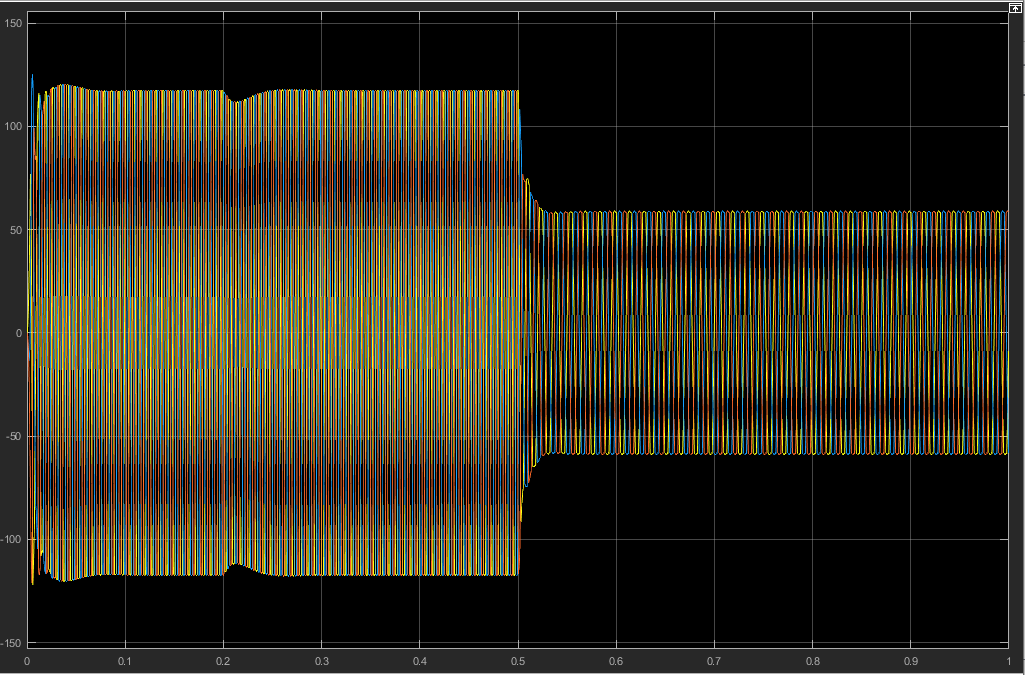
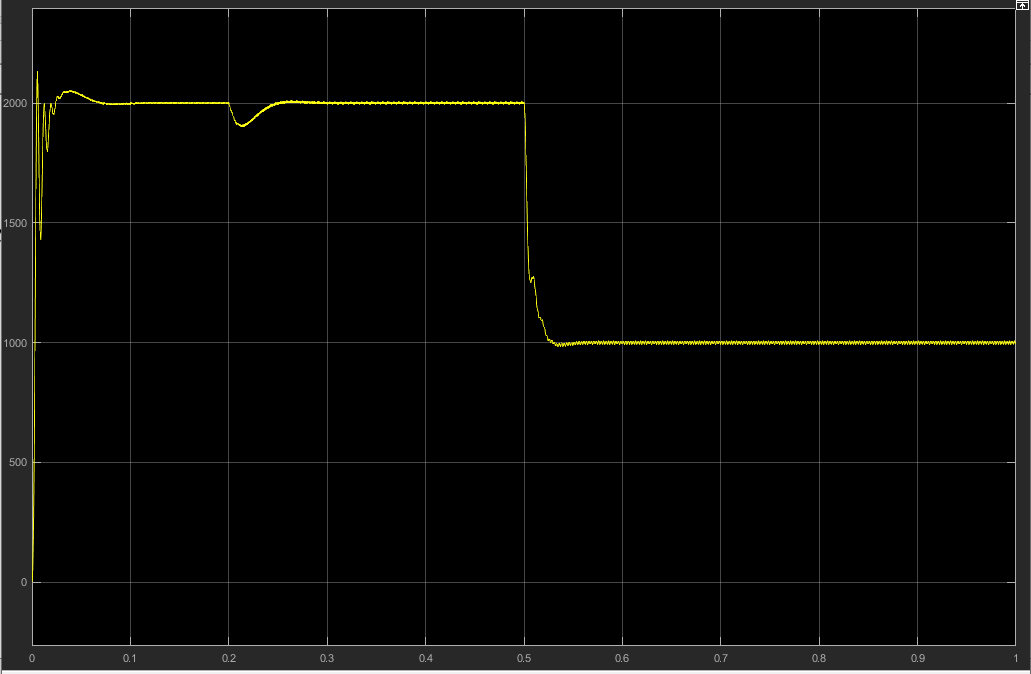
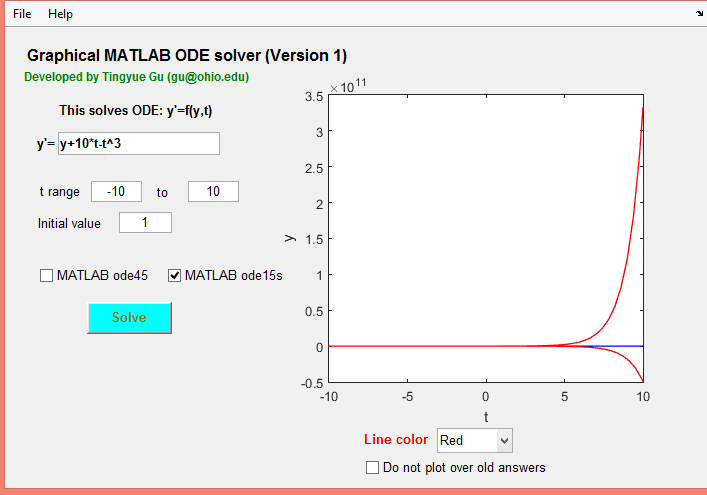
خروجی متلب :
لطفاً براي ارسال دیدگاه، ابتدا وارد حساب كاربري خود بشويد