کنترل هواپیمای بدون سرنشین با فازی در متلب
کنترل هواپیمای بدون سرنشین با فازی در متلب:پروژه شبیه سازی متلب
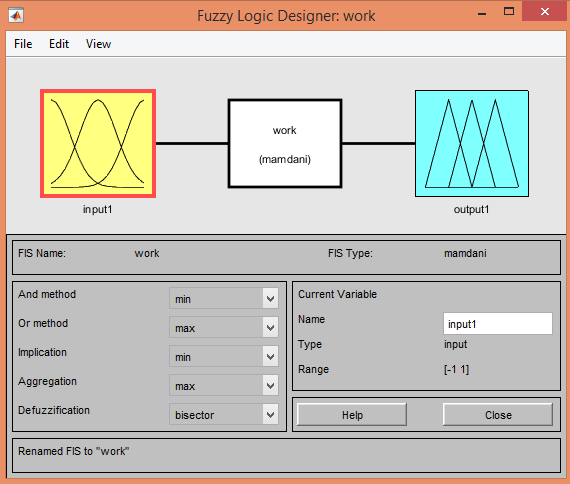
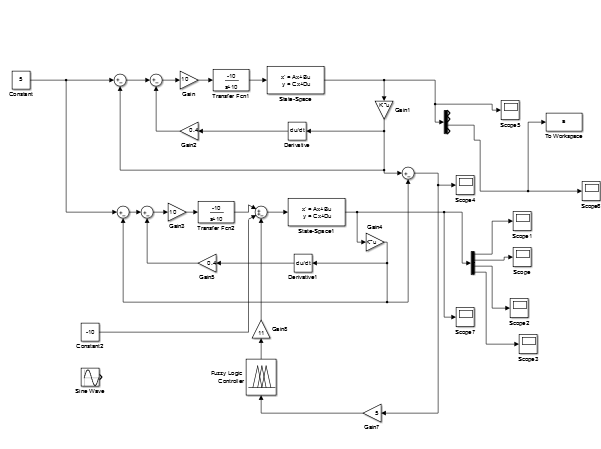
پروژه شبیه سازی متلب:افزایش روز افزون استفاده از هواپیماهای بدون سرنشین (پهپاد) و جایگاهی که این نوع هواپیماها در صنعت دفاعی کشورها پیدا کرده، باعث شده است که سرمایه گذاری های کلانی در این زمینه شود. یکی از مهمترین بخش ها در طراحی و ساخت این نوع هواپیماها، طراحی سیستم کنترل می باشد و اگر هواپیما از نوع بدون سرنشین باشد و فاکتورهایی مانند برد پروازی و مانور پذیری بالا حائز اهمیت باشند، در انتخاب سیستم کنترل و ابزار دقیق مناسب باید دقت بسیار نمود. از آنجا که افزایش برد پرواز در پهپادها از دغدغه اصلی طراحان سیستم کنترل پهپادها می باشد، بایستی به دنبال روشی نوین بود تا وابستگی پهپاد به ایستگاه زمینی را کاهش داده و حتی در بعضی ماموریت های خاص کاملاً حذف کرد. هدف از این مقاله کنترل ارتفاع یک وسیله پرنده بدون سرنشین است. به طوریکه نسبت به اغتشاشاتی نظیر انحراف الویتور و Gust مقاوم باشد و سریعاً آنها را خنثی نماید به این منظور در این پروژه از روش کنترل فازی استفاده شده است. سیستم مورد بررسی یک سیستم LTI دو ورودی دو خروجی می باشد. لذا ما در دو بخش ابتدا دو کنتلر دو ورودی تک خروجی را برای سیستم پیاده نمودیم. سپس با ادغام دو کنترلر یک کنترلر دو ورودی دو خروجی ساختیم که نسبت به حالت قبل دارای پیچیدگی بیشتری است.
مقاله رفرنس:
[۱]. BRIAN L. STEVENS. FRANK L. LEWIS AIRCRAFT CONTROL AND SIMULATION,
۲nd Edition
[۲]. A. R. Babaei, M. Mortazavi, M. H. Moradi. ‘’ Classical and genetic-fuzzy autopilot design
for unmanned aerial vehicles’’ Elsevier,2009
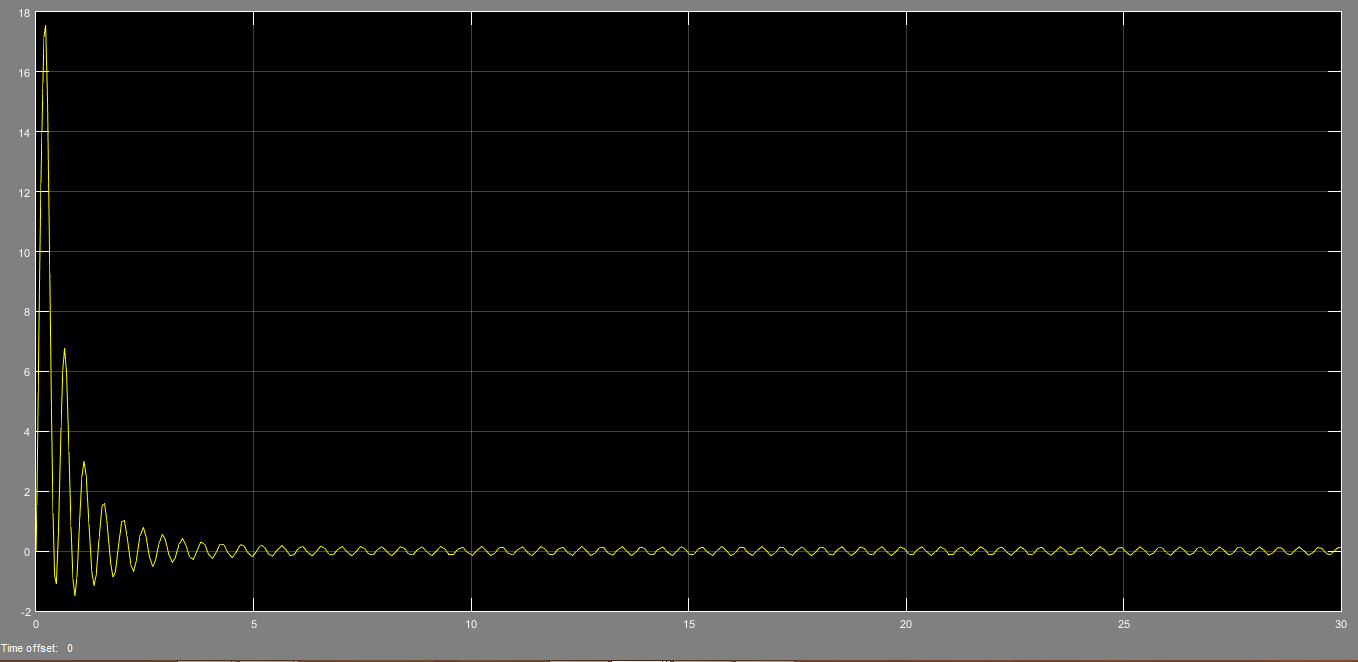
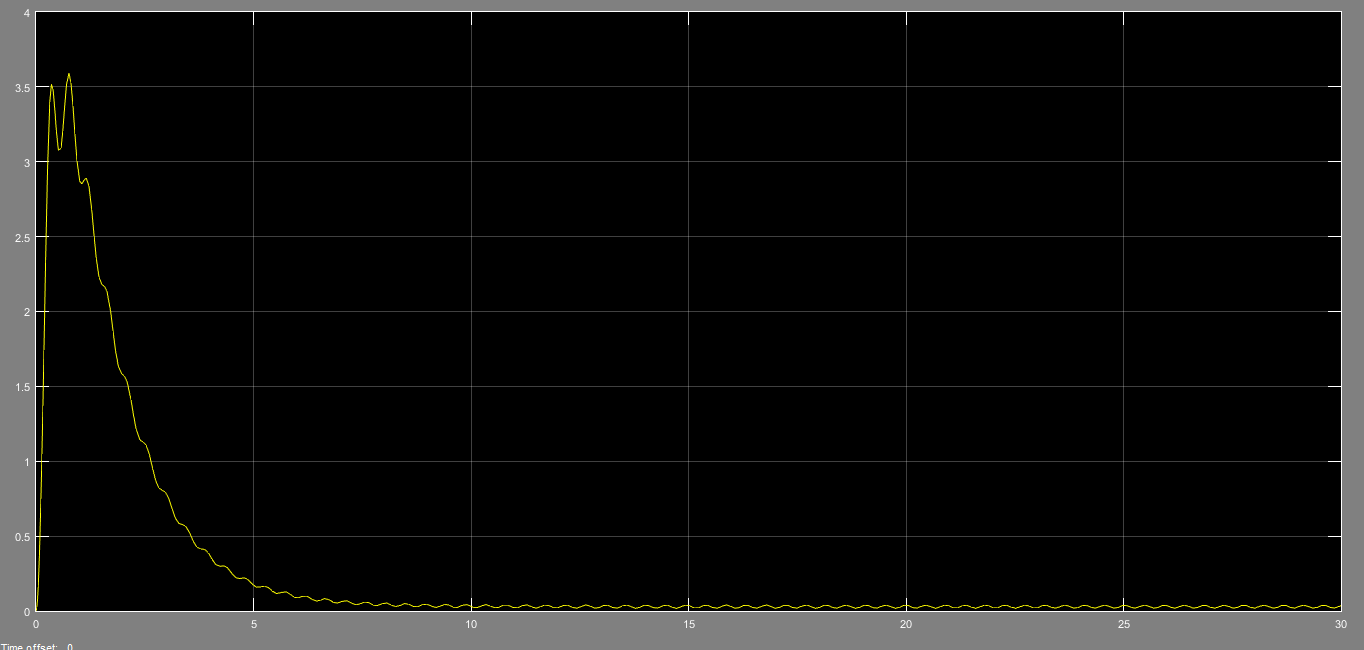
خروجی متلب:
کلیدواژهها:
کنترلر فازی، هواپیمای بدون سرنشین، خلبان خودکار،فازی،پهباد،uav،fuzzy،پروژه شبیه سازی متلب

لطفاً براي ارسال دیدگاه، ابتدا وارد حساب كاربري خود بشويد