کنترل فیدبک حالت روی پاندول معکوس همراه گزارش
کنترل فیدبک حالت روی پاندول معکوس کنترل همراه گزارش:انجام پروژه متلب
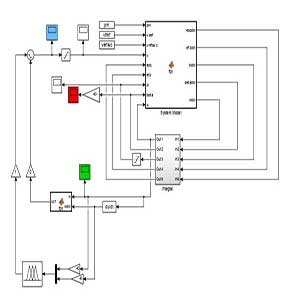
انجام پروژه متلب:یک پاندول معکوس سه درجه آزادی سری را با استفاده از روش کنترل فیدبک حالت بر پایه الگوریتم ژنتیک کنترل کند. پاندول معکوس دوگانه سری مورد بحث ، از سه عنصر ارابه، بازوی اول و بازوی دوم تشکیل شده است . ورودیهای سیستم برای پ ایداری این مجموعه، شش پارامتر است که شامل جابجایی و سرعت ارابه، زاویه و سرعت زاو یه ای بازوی اول وزاویه و سرعت زاویه ای بازوی دوم می باشد.
اساس ساختمان فیزیکی پاندول معکوس جرمی است که توسط میله ای فلزی سبکی به یک تکیه گاه دارای حرکت انتقالی دریک جهت متصل شده است و این جرم حول محول اتصال دارای یک درجه آزادی دورانی می باشد به این ترتیب سیستم دو درجه آزادی می باشد دراین مقاله درمورد کنترل مدلسازی ریاضی و انتخاب متغیرهای حالت و بدست آوردن معادلات برای دستگاهی که برای این پروژه ساخته شده است می پردازد درادامه با استفاده از فضای حالت رویت پذیری و کنترل پذیری سیستم و عوامل موثر برسیستم بررسی می شود
انجام پروژه متلب:پس از مدل سازی سیستم و ب دست آوردن معادلات حالت ، شش ضریب موجود در قانون کنترلی با استفاده از الگوریتم ژنتیک و تابع هزینه مناسب که بر اساس زمان نشست ۱ و فراجهش ۲ حالت های سیستم نوشته می شود، بهینه خواهند شد .
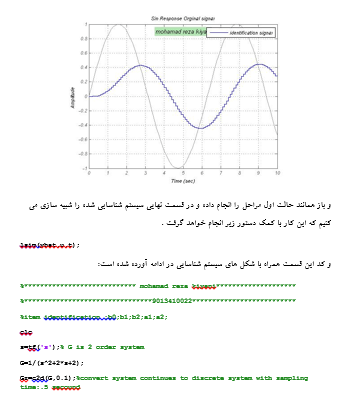
انجام پروژه متلب:الگوریتم ژنتیک استفاده شده در این مقاله از روش چند ادغامی ۳ بهره میجوید که از متدهای به روز در نوع خود میباشد. شبیه سازی های رایانه ای نشان می دهد، راهکارهای پیشنهادی قادر به کنترل سیستم دینامیکی پاندول معکوس دوگانه سری بوده و میتواند آن را از هر شرایط اولیه دلخواه به حالت های مطلوب نزدیک کند.
انجام پروژه متلب
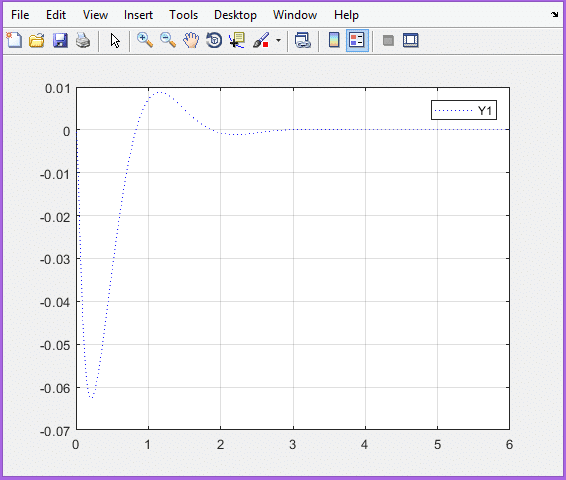
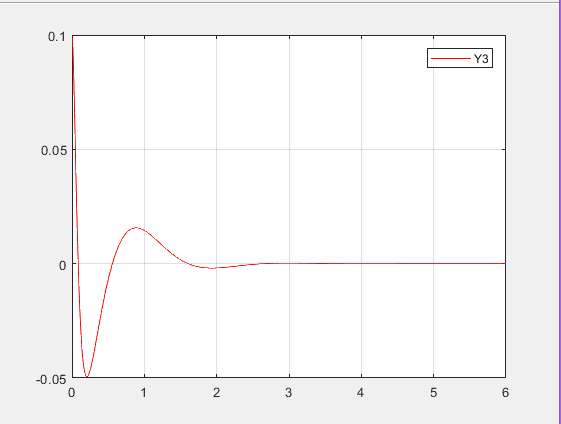
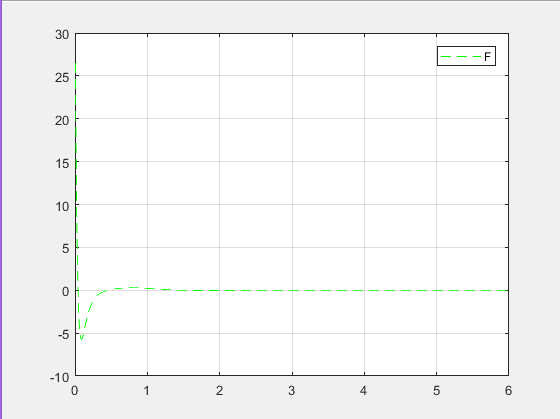
خروجی متلب:
لطفاً براي ارسال دیدگاه، ابتدا وارد حساب كاربري خود بشويد