پارک خودکار خودرو با کنترلر فازی در متلب :پروژه آماده متلب
پارک خودکار خودرو با کنترلر فازی در متلب :پروژه آماده متلب
پروژه آماده متلب
:پروژه متلب
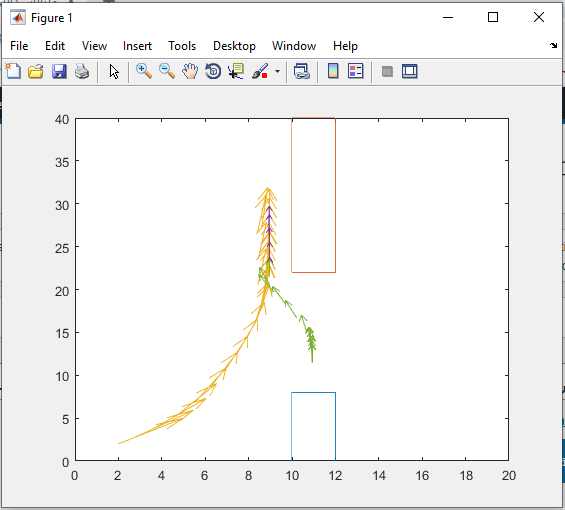
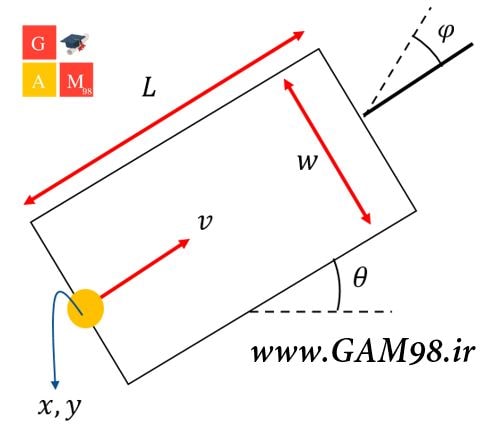
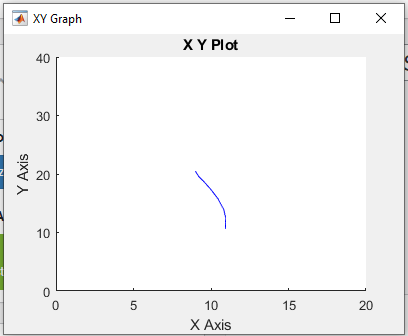
در این محصول، یک کنترلر فازی در نرمافزار متلب برای پارک دوبل خودکار یک خودرو در بین دو خودروی پارکشده، طراحی شدهاست. در این مسئله با پارامترهایی نظیر طول و عرض خودروی موردنظر، ابعاد دو خودروی پارک شده و فاصله بین آنها سروکار داریم. روند کلی برای پارک خودرو بین دو خودروی عقب و جلوی آن به این صورت است که یک نقطه از مختصات خودرو بعنوان ملاک تعیین میشود. این نقطه تا زمان پارک در محل موردنظر، معیار ما برای انجام محاسبات است. فاصله در جهات x و y و همچنین زاویه قرارگیری خودرو (phi)، در هر لحظه بهبخش منطق فازی وارد شده و خروجی (چرخش خودرو و سرعت) محاسبه میشود.
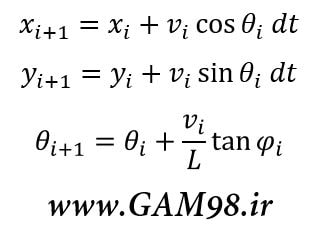
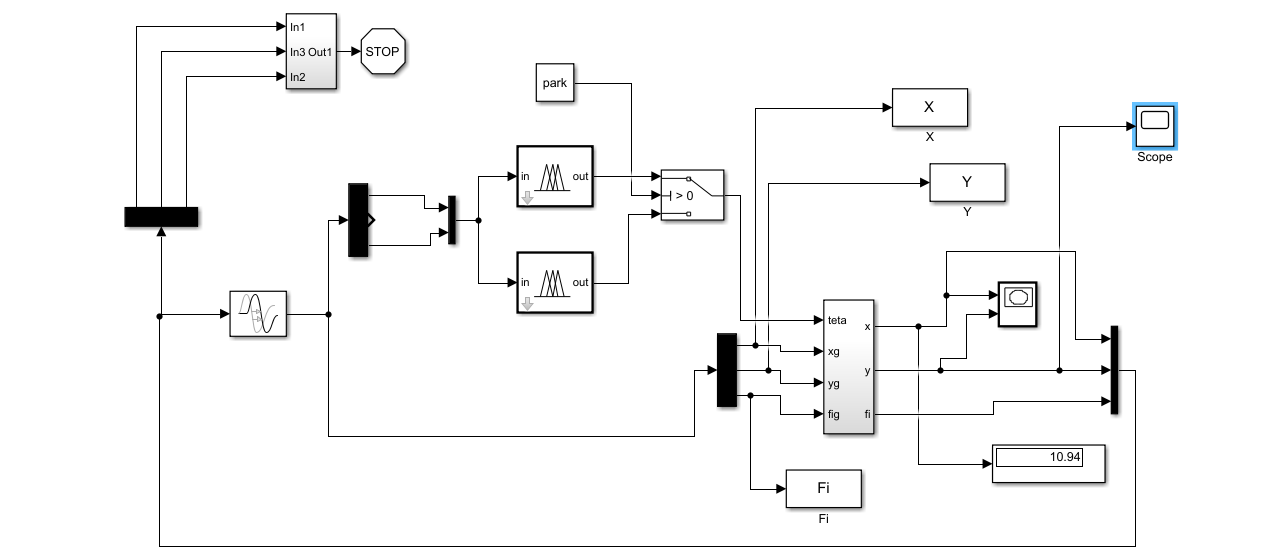
از نظر دینامیکی، به روشهای مختلفی میتوان این مسئله را حل نمود. یکی از روشها، استفاده از ۳ ورودی و ۲ خروجی است. ورودیها شامل فاصله خودرو در جهت x و y و زاویه قرارگیری خودرو (theta) است. همانظور که ذکر شد، خروجی نیز شامل چرخش و سرعت خودرو است. در واقع چرخش نقش فرمان خودرو در هنگام پارک را ایفا میکند. در ادامه به توضیح روش حل بطور مختصر میپردازیم.
مجموعههای فازی برای سیستم پارک اتوماتیک خودرو
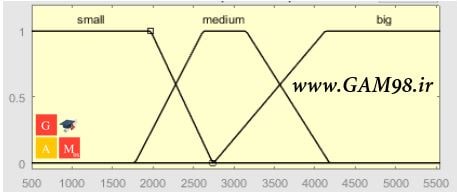
پروژه آماده متلب قبل از تعریف قوانین فازی برای انجام محاسبات و بدست آوردن خروجی بایستی مجموعههای فازی تعریف شوند. مجموعههای فازی این قابلیت را به ما میدهند تا مثلا فاصله x را بصورت زیاد، متوسط و کم تعریف کنیم. این تعاریف نسبی هستند چرا که “فاصله کم” از نظر هر شخص متفاوت است. مجموعههای فازی برای طراحی کنترلر فازی پارک خودکار خودرو، بصورت زیر تعریف میشوند.
- مجموعه فازی ورودی فاصله در جهت x: بزرگ (big)، متوسط (medium) و کوچک (small)
- مجموعه فازی ورودی فاصله در جهت y: بزرگ (big) و کوچک (small)
- مجموعه فازی ورودی زاویه خودرو با سطح افق theta: صفر (zero) و بزرگ (big)
- مجموعه فازی خروجی سرعت خودرو v: منفی (negative) و صفر (zero)
- مجموعههای فازی خروجی زاویه چرخش خودرو phi: راست (right)، چپ (left) و صفر (ze
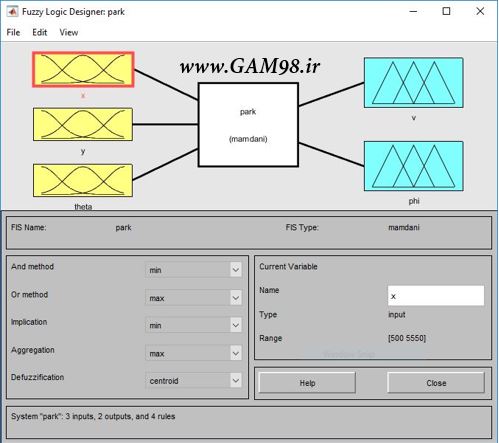
پروژه آماده متلب که در سمت چپ شکل فوق ورودیها و سمت راست نیز خروجیها دیده میشوند. با دابل کلیک برروی هریک از مجموعههای فازی، توابع عضویت آنها قابل مشاهده خواهد بود. همچنین در تصویر فوق، با رفتن به تب View و سپس Rules میتوان قوانین فازی مربوط به این کنترلر را مشاهده کرد. برای تغییر قوانین فازی بایستی از مسیر Edit و سپس Rules استفاده کرد. قوانین فازی در نرمافزار متلب بصورت شکل زیر میباشند.

لطفاً براي ارسال دیدگاه، ابتدا وارد حساب كاربري خود بشويد