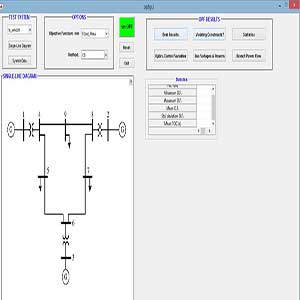
کنترل ناوبری هواپیما با کمک GUI در متلب
کنترل ناوبری هواپیما با کمک GUI در متلب:انجام پروژه متلب
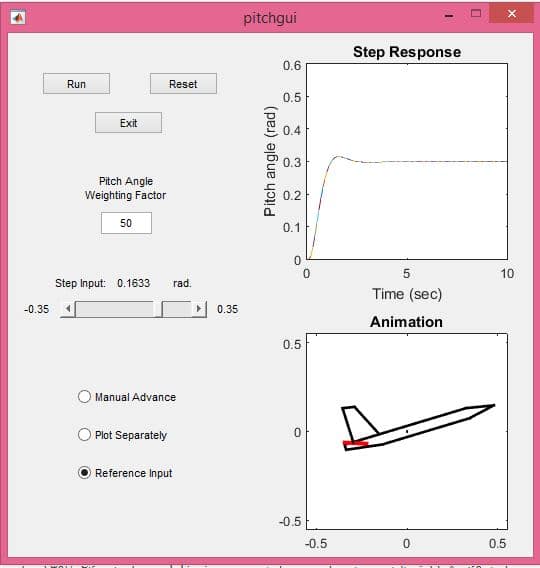
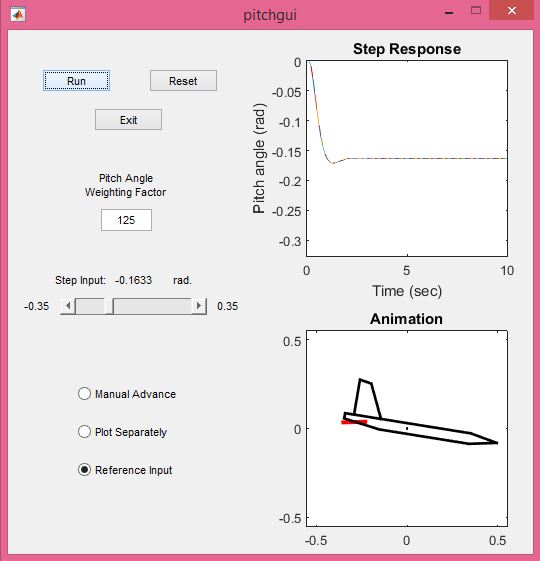
انجام پروژه متلب:کنترل ناویری رو میتوانید با پارمترهای مختلف امتحان کرد و تاثیرات تغییرات هواپیما را در خروجی ببینید.
انجام پروژه متلب: سطوح کنترل پرواز هواگرد دستگاههای آیرودینامیک هستند که خلبان با کنترل آنها میتواند بلندی پرواز هواگرد را تنظیم و کنترل کند.
توسعه سطوح کنترل پرواز با بازده بالا، جهش مهمی در توسعه هواگردها بود. نخستین تلاشها در طراحی هواگرد ثابتبال به پدید آمدن نیروی کافی برای بلند کردن هواگرد از زمین انجامید. اما هنگامیکه هواگرد در هوا بود کنترل آن ناممکن می
شد و بیشتر مواقع باعث فاجعه بود. توسعه سطوح کنترل پرواز مؤثر، باعث پرواز پایدار شد.
سطوح کنترل پرواز به دو بخش اصلی و ثانوی تقسیم میشوند.
این نوشتار به توضیح سطوح کنترلی میپردازد که در هواگرد ثابتبال با طراحی متعارف بکار میروند. دیگر پیکربندیهای هواگردهای بالثابت ممکن از سطوح کنترل پرواز دیگری استفاده کنند. اما اصول آنها، یکی هستند. کنترل کنندههای (دسته و سکان) هواگرد گردندهبال (هواچرخ یا بالگرد) همان کار کنترل چرخش در امتداد سه محور را انجام میدهند. اما سطوح کنترل چرخنده (پروانه و پروانه دم بالگرد) در آنها با عملکرد کاملاً متفاوتی کار میکنند.
شهپر، اصلیترین کنترلکننده گردش هواگرد است. با افزایش نیروی برآر، نیروی پسار نیز افزایش مییابد. هنگامی که دسته به سمت چپ میچرخد تا هواگرد به سمت چپ بغلتد شهپر سمت راست پایین میرود و نیروی برآر در بال راست را افزایش میدهد؛ بنابراین نیروی پسار القایی افزایش مییابد. استفاده از شهپرها باعث پدیده انحراف برعکس در دور زدن میشود. یعنی دماغه هواگرد در جهت خلاف گردش شهپر حرکت میکند. انحراف برعکس در دور زدن بیشتر در هواگردهای کوچک با بالهای بلند مانند بادپر دیده میشود و با حرکت سکان پدید میآید. شهپرهای نامساوی شهپرهایی هستند که در آنها انحراف شپهر پایینبرنده کمتر از شهپر بالابرنده است تا انحراف برعکس در دور زدن را کم کنند.
سکان
سکان اصلیترین سطح کنترلکننده هواگرد است. سکان بیشتر با پدال کنترل میشود تا دسته. کاربرد اصلی آن کنترل گردش هواگرد و چرخش آن به دور محور عمودی آن است. ممکن است به عکسالعمل انحراف برعکس در دور زدن که با سطح کنترل گردش ایجاد میشود نیز «سکان» گفته شود
اگر از سکان به دفعات برای تراز کردن پرواز استفاده شود در آغاز، هواگرد در جهت تنظیم شده سکان گردش میکند. پس از چند ثانیه، هواگرد در جهت خلاف سکان گردش میکند.
این هم جهتیِ نخستین به خاطر افزایش سرعت بال، در خلاف جهت گردش و کاهش سرعت در بال دیگر است. بال سریعتر، نیروی برآر بیشتری پدیدمیآورد و بنابراین به سوی بالا میرود. درحالیکه در بال دیگر، نیروی برآر کمتری پدید میآید و بنابراین پایین میرود. با ثابت ماندن سکان در یک جهت خاص، میل به غلتش ادامه مییابد. زیرا قرار گرفتن هواگرد در یک زاویه مشخص نسبت به جریان هوا، باعث لغزیدن آن در سمت بالِ پایین رفته میشود. هنگام استفاده از سکان سمت راست در هواگرد با شکل بال هشتی ۸، زاویه حمله بال سمت چپ افزایش مییابد و به دنبال چرخش به راست، زاویه حمله بال راست کاهش مییابد. واکنش هواگرد ۷ مانند برعکس است. این اثر سکان، بیشتر در هواپیمای مدل به کار میرود. زیرا اگر در طراحی بال هوا گرد، به اندازه کافی از هشتی یا چند شکلی استفاده شود ممکن است سطوح کنترل غلتش مانند شهپرها کاملاً حذف شوند.
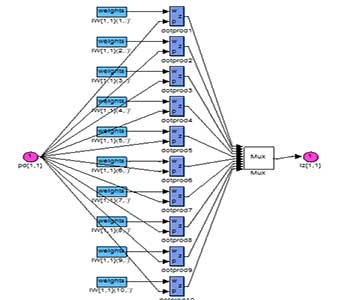
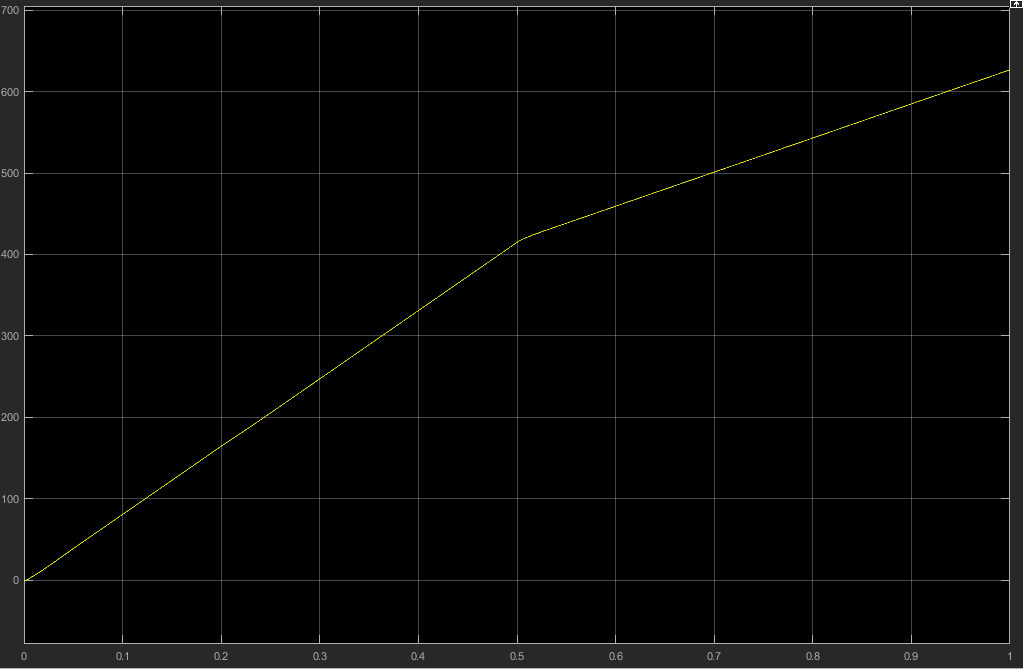
خروجی متلب برنامه :
لطفاً براي ارسال دیدگاه، ابتدا وارد حساب كاربري خود بشويد