
شبیه سازی سیستم رادار در سیمولینک متلب
شبیه سازی سیستم رادار شامل فرستنده ،منتقل کننده و دریافت کننده در سیمولینک متلب:انجام پروژه متلب
رادار، یک دستگاه رادیویی است که برای مشاهدهٔ جسمها و اندازهگیری برخی ویژگیهای آنها بوسیلهٔ موجهای رادیویی بکار میرود. کاربرد سنتی رادار و محلّ پیدایش و رشد آن در صنایع نظامی و هوانوردی است. در صنایع نظامی نقش اصلی یک سامانهٔ راداری، نظارت بر یک گسترهٔ بزرگ و تشخیص جسمهای متحرّک، ردیابی هدفها و استخراج مشخّصههایی مانند فاصله، جهت، سرعت، ارتفاع و اندازه هدف میباشد. رادارهای نظامی برای کاربردهای نظارت، ردیابی هدف، هدایت و ناوبری، و دید از پشت موانع ساخته میشوند. کاربردهای غیرنظامی رادار در سیستمهای تصویر برداری ماهوارهای، هدایت کشتی و هواپیما، هواشناسی، کنترل ترافیک و اتوموبیلهای هوشمند است.
رادار، ابتدا موجهای خود را میگسیلد و درصورتیکه مانعی مانند یک شیء پرنده در آسمان، مقابل موجهای گسیلیده قرار داشته باشد، موجهای ضعیفتری را بازمیتابانند. اینک اگر رادار، مقداری از این موجها را دریافت کند، میتواند با ضرب سرعت موج در مدّت زمان دریافت موج، فاصلهٔ شئ را محاسبه کند.
انواع رادار از نظر ارسال موج
- رادار پالسی (تپی)
- رادار موج پیوسته، مانند سینوسی یا با مدولاسیون FM
کاربردها
- نظارت و رهگیری هواپیماها و موشکها؛
- نظارت و رهگیری هدفهای دریایی یا زمینی؛
- نظارت و رهگیری جسمهای فضایی؛
- هواشناسی؛
- اندازهگیری سرعت ترابرها؛
- رادار دهانه-ترکیبی برای تصویر دو-بعدی و سه-بعدی؛
- یافتن مین در زمین؛
- فرود (برای نمونه برای هواپیما) دقیق؛
- عکسبرادری از دیگرکُرهها با رادار تصویری؛
- پرهیز تصادم؛
- یافتن آب در منطقههای شنزار و خشک؛
- نظارت بر هدفهای جنبنده در زمین؛
- نظارت بر هدفهای جنبنده در منطقههای پُردرخت؛
- نقشهبرداری.
فصل اول
مقدمه:
۱-۱-اصول کلی رادار و عملکرد آن
رادار یک سیستم الکترومغناطیسی است که برای تشخیص و تعیین موقعیت هدفها به کار می رود. این دستگاه بر اساس یک شکل موج خاص به طرف هدف برای مثال یک موج سینوسی با مدولاسیون پالسی(Pulse- Modulated) و تجزیه وتحلیل بازتاب (Echo) آن عمل می کند. رادار به منظور توسعه توانایی حسیهای چندگانه انسانی برای مشاهده محیط اطراف مخصوصاً حس بصری به کار گرفته شده است. ارزش رادار در این نیست که جایگزین چشم شود بلکه ارزش آن در عملیاتی است که با چشم نمی توان انجام داد. رادار نمی تواند جزئیات را مثل چشم مورد بررسی قرار دهد و یا رنگ اجسام را با دقتی که چشم دارد تشخیص داد بلکه با رادار می توان درون محیطی را که برای چشم غیر قابل نفوذ است دید مثل تاریکی، باران، مه، برف و غبار و غیره. مهمترین مزیت رادار، توانایی آن در تعیین فاصله یا حدود هدف می باشد.
یک رادار ساده شامل آنتن فرستنده، آنتن گیرنده و عنصر آشکارساز انرژی یا گیرنده میباشد. آنتن فرستنده پرتوهای الکترومغناطیسی تولید شده توسط نوسانگر (Oscillator) را منتشر می کند. بخشی از سیگنال ارسالی (رفت) به هدف خورده و در جهات مختلف منعکس می گردد. برای رادار انرژی برگشتی در خلاف جهت ارسال مهم است.
آنتن گیرنده انرژی برگشتی را دریافت و به گیرنده می دهد. در گیرنده بر روی انرژی برگشتی عملیاتی، برای تشخیص وجود هدف و تعیین فاصله و سرعت نسبی آن، انجام میشود. فاصله آنتن تا هدف با اندازه گیری زمان رفت و برگشت سیگنال رادار معین میشود. تشخیص جهت، یا موقعیت زاویه ای هدف توسط جهت دریافت موج برگتشی از هدف امکان پذیر است. روش معمول بری مشخص کردن جهت هدف، به کار بردن آنتن با شعاع تشعشعی باریک می باشد. اگر هدف نسبت به رادار دارای سرعت نسبی باشد، تغییر فرکانس حامل موج برگشتی (اثر دوپلر) (Doppler) معیاری از این سرعت نسبی (شعاعی) میباشد که ممکن است برای تشخیص اهداف متحرک از اهداف ساکن به کار برود.در رادارهایی که بطور پیوسته هدف را ردیابی می کنند، سرعت تغییر محل هدف نیز بطور پیوسته آشکار میشود.
نام رادار برای تاکید روی آزمایشهای اولیه دستگاهی که آشکارسازی وجود هدف و تعیین فاصله آن را انجام می داده بکار رفته است. کلمه رادار (RADAR) اختصاری از کلمات: Radio Detection And Ranging است، چرا که رادار در ابتدا به عنوان وسیله ای برای هشدار نزدیک شدن هواپیمای دشمن به کار می رفت و ضدهوائی را در جهت مورد نظر می گرداند. اگر چه امروزه توسط رادارهای جدید و با طراحی خوب اطلاعات بیشتری از هدف، علاوه بر فاصله آن بدست می آید، ولی تعیین فاصله هدف (تا فرستنده) هنوز یکی از مهمترین وظایف رادار می باشد. به نظر می رسد که هیچ تکنیک دیگری به خوبی و به سرعت رادار قادر به اندازه گیری این فاصله نیست.
معمولترین شکل موج در رادارها یک قطار از پالسهای باریک مستطیلی است که موج حامل سینوسی را مدوله می کند. فاصله هدف با اندازه گیری زمان رفت و برگشت یک پالس، TR به دست می آید. از آنجا که امواج الکترومغناطیسی با سرعت نور در فضا منتشر می شوند. پس این فاصله، R، برابر است با:
به محض ارسال یک پالس توسط رادار، بایستی قبل از ارسال پالس بعدی یک مدت زمان کافی بگذرد تا همه سیگنالهای انعکاسی دریافت و تشخیص داده شوند.
بنابراین سرعت ارسال پالسها توسط دورترین فاصلهای که انتظار می رود هدف در آن فاصله باشد تعیین می گردد. اگر تواتر تکرار پالسها (Pulse Repetiton Frequency) خیلی بالا باشد، ممکن است سیگنالهای برگشتی از بعضی اهداف پس از ارسال پالس بعدی به گیرنده برسند و ابهام در اندازه گیری فاصله ایجاد گردد. انعکاسهایی که پس از ارسال پالس بعدی دریافت می شوند را اصطلاحاً انعکاسهای مربوط به پریود دوم (Second-Time-Around) گویند چنین انعکاسی در صورتی که به عنوان انعکاس مربوط به دومین پریود شناخته نشود ممکن است فاصله راداری خیلی کمتری را نسبت به مقدار واقعی نشان بدهد.
حداکثر فاصله ای که پس از آن اهداف به صورت انعکاسهای مربوط به پریود دوم ظاهر می گردند را حداکثر فاصله بدون ابهام (Maximum Unambiguous Range) گویند و برابر است با:
که در آن=تواتر تکرار پالس بر حسب هرتز می باشد. در شکل زیر حداکثر فاصله بدون ابهام بر حسب تواتر تکرار پالس رسم شده است.
شکل ۱-۱ حداکثر فاصل بدون ابهام بر حسب تواتر تکرار پالس
اگر چه رادارهای معمولی یک موج با مدولاسیون پالسی(pulse-Modulated Waveform) ساده را انتشار می دهند ولی انواع مدولاسیون مناسب دیگری نیز امکان پذیر است حامل پالس ممکن است دارای مدولاسیون فرکانس یا فاز باشد تا سیگنالهای برگشتی پس از دریافت در زمان فشرده شوند. این عمل مزایایی درقدرت تفکیک بالا در فاصله (High Range Resolution) میشود بدون این که احتیاج به پالس باریک کوتاه مدت باشد. روش استفاده از یک پالس مدوله شده طولانی برای دسترسی به قدرت تفکیک بالای یک پالس باریک، اما با انرژی یک پالس طولانی، به نام فشردگی پالس (Pulse Compression) مشهور است.
در این مورد موج پیوسته (CW) را نیز می توان به کاربرد و ازجابجایی تواتر دوپلر. برای جداسازی انعکاس دریافتی از سیگنالرفت و انعکاسهای ناشی از عوامل ناخواسته ساکن(Cluttre) استفاده نمود. با استفاده از موج CW مدوله نشده نمی توان فاصله را تعیین کرد و برای این کار باید مدولاسیون فرکانس یا فاز به کار رود.
۲-۱-فرم ساده معادله رادار
معادله رادار برد رادار را به مشخصات فرستنده، گیرنده، آنتن، هدف و محیط مربوط می سازد. این معادله نه تنها جهت تعیین حداکثر فاصله هدف تا رادارمفید است بلکه برای فهم عملکرد رادارو پایهای برای طراحی رادار به کار می رود.
در این قسمت فرم ساده معادله رادار ارائه می گردد.
اگر توان فرستنده رادار P1 و آنتن فرستنده ایزوتروپ (Isotropic) (در همه جهات یکسان تشعشع کند) باشد، چگالی توان (Power Density) (توان در واحد سطح) در فاصله R از رادار برابر است با توان فرستنده بر مساحت یک کره فرضی به شعاع R و یا:
(۳-۱) چگالی توان تشعشعی از آنتن ایزوتروپ
در رادارها از آنتنهای سمت گرا (جهت دار) استفاده میشود تا توان تشعشعی، P1 در یک جهت خاص هدایت گردد. بهره آنتن، G، معیاری از افزایش توان تشعشعی آنتن درجهت هدف نسبت به توان تشعشعی ناشی از یک آنتن ایزوتروپ می باشد و ممکن است به صورت نسبت حداکثر شدت تشعشع ناشی از یک آنتن مورد نظر به شدت تشعشع ناشی از آنتن ایزوتروپ بدون تلفات با همان توان ورودی تعریف گردد. (شدت تشعشع عبارت است از توان تشعشعی در واحدزاویه فضایی در جهت مورد نظر) بنابراین چگالی توان تشعشعی از یک آنتن با بهره G روی هدف برابر است با:
(۴-۱) = چگالی تشعشعی از آنتن سمت گرا
هدف با مقداری از توان تابش شده تلاقی کرده و مجدداً آن را درجهات مختلف تشعشع می کند مقداری از توان رسیده به هدف که با آن تلاقی کرده و دوباره به سمت رادار تشعشع شده بر حسب سطح مقطع راداری، ، مشخص و طبق رابطه زیر تعریف میشود.
(۵-۱) = چگالی توان سیگنال برگشتی در محل رادار
در این رابطه که سطح مقطع راداری واحد سطح دارد که مشخصه ای از هر هدف خاص بوده و معیاری از اندازه هدف از دید رادار می باشد. آنتن رادار مقداری از توان بازگشتی از هدف رادریافت می کند. اگر سطح موثر آنتن گیرنده Ae باشد، توان دریافتی توسط رادار برابر است با:
(۶-۱)
حداکثر برد رادار، فاصله ای است که بالاتر از آن، هدف قابل آشکارسازی نباشد و آن موقعی است که توان دریافتی رادار درست برابر حداقل توان قابل آشکارسازی،، باشد پس:
(۷-۱)
این شکل اساسی معادله رادار است. توجه گردد که پارامترهای مهم آنتن در این رابطه، بهره فرستندگی و سطح موثر گیرندگی آن می باشند.
در تئوری آنتنها. رابطه بین بهره فرستندگی و سطح موثر گیرندگی به صورت زیر ارائه میشود.
(۸-۱)
چون در رادارها معمولا آنتن فرستنده و گیرنده یکی می باشد، با جایگذاری معادله فوق در معادله ما قبلی آن ابتدا برای Ae و سپس برای G، معادله رادار را به دو صورت زیر می توان نوشت:
(۹-۱)
(۱۰-۱)
این سه صورت معادله رادار فوق ضرورت احتیاطدر تفسیر معادله رادار را نشان می دهند. برای مثال، از معادل (۹-۱) ممکن است نتیگه گیری شود که برای رادار متناسب با می باشد، در صورتی که معادله (۱۰-۱) وابستگی را مشخص می کند و معادله (۷-۱) عدم وابستگی فاصله را نسبت به طول موج، نشان می دهد. رابطه صحیح بستگی به این دارد که بهره آنتن نسبت به طول موج ثابت فرض شده است یا نسبت به سطح موثر آن. علاوه بر آن، اعمال محدودیت های دیگر، نظیر ضرورت بررسی دقیقتر یک حجم مشخص از فضا در یک مدت معین می تواند موجب وابستگی دیگری نسبت به طول موج گردد.
این صور ساده شده معادله رادار، به طور کافی مشخصات یک رادار عملی را تشریح نمی کنند. بسیاری از عوامل مهم که در برد رادار موثرند. به طور صریح در معادلههای منظور نشده اند. در علم حداکثر برد رادار خیلی کمتر از مقدار است که از معادلات بالاتر پیش بینی میشود، بعضی اوقات تا حد نصف می باشد. دلائل زیادی برای این کاهش نسبت به عملکرد واقعی وجود دارد که در بخش ۲ شرح داده خواهند شد.
۳-۱-شمای بلوکی رادارو عملکرد آن
عملکرد یک رادار پالس نمونه را میتوان با شمای بلوکی شکل (۲-۱) تشریح نمود.
شکل(۲-۱) – شمای بلوکی یک رادار پالسی
فرستنده ممکن است یک نوسان ساز، شبیه یک مگنترون باشد که بوسیله مدولاتور به گونه ای به آن پالس اعمال می گردد (خاموش و روشن میشود) که یک قطار تکراری ازپالسها ایجاد نماید. مگنترون تقریباً از پر استفاده ترین منابع مایکروویو در رادارها میباشد. یک رادار نمونه برای کشف هواپیما در فواصل ۱۰۰ الی ۲۰۰ مایل دریایی ممکن است نیاز به توان حداکثری حدود یک مگاوات (یا توان متوسط حدود چند کیلو وات)، پهنای پالسی حدود چند میکروثانیه و تواتر تکرار پالسی حدود چند صد پالسی در ثانیه داشته باشد. شکل موج ایجاد شده توسط فرستنده، به وسیله یک خط انتقال به آنتن منتقل می گردد و از آنجا در فضا منتشر می گردد. معمولاً یک آنتن برای هم فرستندگی و هم گیرندگی به کار می رود، در این صورت گیرنده باید در مقابل صدمات ناشی از توان بالای فرستنده حفظ شود این کار توسط دوپلکسر (Duplexer) انجام می گیرد. وظیفه دیگر دوپلکسرهدایت امواج برگشتی به طرف گیرنده و جلوگیری از رسیدن آن به فرستنده است.
دوپلکسر ممکن است شامل دو لامپ تخلیه گازی یکی به نام TR (Transmit- Receive) (فرستنده- گیرنده) و دیگری ATR (Anti-Transmit-Receive) آنتی فرستنده- گیرنده باشد. TR درزمان ارسال از گیرنده حفاظت می کند و ATR در زمان دریافت، موج برگشتی را به طرف گیرنده هدایت می نماید.سر کولاتورهای فریتی حالت جامد (Solid State Ferrite Circulators) و حفاظت کنندههای گیرنده با لامپ گاز پلاسما TR و یا محدود کننده های دیودی نیز به عنوان دوپلکسر به کار برده میشود.
گیرنده معمولاً ازنوع سوپر هترودین (Super Heterodyne) است. اولین طبقه آن ممکن است یک تقویت کننده کم نویز نظیر یک تقویت کننده پارامتر یا تراتزیستوری کم نویز باشد. لیکن همیشه کاربرد یک تقویت کننده کم نویز در اولین طبقه مناسب رادار نمی باشد. ورودی گیرنده می تواند فقط یک طبقه مخلوط کنده (Mixer) باشد، خصوصاً دررادارهای نظامی که باید در یک محیط پر از نویز کار کنند. با وجودی که یک گیرنده با ورودی و خروجی کم نویز کم نویز خیلی حساس تر است لیکن ورودی مخلوط کننده می تواند دارای محدوده کار (Dynamic Range) بزرگتر، حساسیت کمتر از مقابل اضافه بار و آسیب پذیری کمتر در مقابل تداخل الکترونیکی باشد.
مخلوط کننده و نوسانگر محلی Local Oscillator (LO) سیگنال RF را به فرکانس میانی (IF) تبدیل می کنند. برای نمونه یک تقویت کننده IF برای یک رادار کنترل کننده ترافیک هوایی ممکن است دارای فرکانس مرکزی MHz 30 یا MHz 60 و پهنای باندی حدود یک مگاهرتز باشد. تقویب کننده IF فوق باید نظیر یک فیلتر تطبیق شده طرح گردد به عبارت دیگر تابع تبدیل پاسخ فرکانسی آن – H(f)- باید نسبت پیک سیگنال به توان متوسط نویز در خروجی را ماکزیمم کند و این وقتی اتفاق می افتد که اندازه تابع تبدیل پاسخ فرکانس H(F) برابر اندازه طیف سیگنال برگشتی (S(f)) و طیف فازی فیلتر تطبیق شده اش برابر منهای طیف فازی سیگنال برگشتی باشد در یک رادار که شکل موج سیگنال آن تقریبا یک پالس مستطیلی است وقتی که حاصل ضرب پهنای باند IF یعنی B درپهنای پالس در حدود یک باشد، یعنی مشخصه فیلتر میان گذر IF طرح شده نزدیک به فیلتر تطبیقی خواهد بود.
پس از ماکزیمم کردن نسبت سیگنال به نویز در تقویت کننده IF مدولاسیون پالسی دومین آشکار ساز استخراج و توسط تقویت کننده تصویری به سطحی کخه معمولا روی یک لامپ اشعه کاتدی CRT قابل نمایش باشد تقویت می گردد.
سیگنالهای زمانی هم برای مشخص کردن فاصله صفر روی نمایشگر به کار گرفته میشوند. اطلاعات زاویه ای از جهت آنتن استخراج می گردد. معمولترین فرم نمایشگر لامپ با اشعه کاتدی از نوع PPI (Plan Position Indicator) است ( شکل ۳-۱ الف) که در مختصات قطبی محل هدف را بر حسب فاصله و زاویه افق (Azimuth) نشان می دهد. نمایش فوق یک نمایش با مدولاسیون شدت (Intensity-Modulated) است به طوری که دامنه خروجی گیرنده شدت شعاع الکترونی را مدوله می کند و شعاع الکترونی از مرکز لامپ به طرف بیرون جاروب میشود. پرتوها همراه با چرخش آنتن تغییر زاویه می دهند. صفحه نشان دهنده B (B-Scope) نمایشگری است شبیه به PPI که مختصات مستطیلی را بجای قطبی برای نمایش دهنده A است که در شکل (۳-۱ب)نشان داده شده است.
این فرم دامنه هدف (محور yها) را بر حسب فاصله (محور xها) برای یک جهت ثابت نمایش می دهد.
شکل (۳-۱) –الف) نمایش فاصله بر حسب زاویه روی Ppi
ب) نمایش دامنه بر حسب فاصله روی نمایشگر A
نمایش فوق با مدولاسیون انحراف است. در کاربرد، این نوع نمایش بیشتر مناسب رادار ردیاب تا رادار تجسسی.
شمای بلوکی ارائه شده در شکل (۲-۱) فرم ساده ای و بسیار از جزئیات در آن حذف شده است فرم فوق شامل دستگاههایی که اغلب در رادار یافت می شوند مثل وسایلی برای جبران سازی خود کار گیرنده در مقابل تغییرات فرکانسی (AFC) یا بهره ای (AGG) یا مداراهایی در گیرنده برای کم کردن تداخل ناشی از رادارهای دیگر و سیگنالهای ناخواسته، یا اتصالات چرخشی در خط انتقال برای ایجاد قابلیت چرخشی آنتن، مدارهایی برای تشخیص هدفهای متحرک از اهداف ساکن ناخواسته (MTI) و فشرده سازی پالس برای رسیدن به قدرت تفکیک بالای پالس کوتاه ولی توسط قدرت یک پالس طولانی نمی شود. در کاربرد رادار بعنوان ردیاب دستگاهی برای تعیین محل زاویه ای هدف متحرک لازم است تا آنتن را به طور خود کار روی هدف قفل کرده و دنبال کند. معمولا دستگاههای نمایش دهندهای نیز برای اطمینان از این که فرستنده شکل مناسب پالس را را سطح قدرت مناسب می دهد و حساسیت گیرنده کاهش نیافته است شامل می شوند. پیش بینی هایی هم ممکن است برای یافتن خرابی تجهیزات بشود تا بتوان مدارهای خراب را براحتی پید و تعویض نمود.
ممکن است بجای نمایش مستقیم سیگنال تصویری خام خارج شده از از رادار تجسسی روی CRT نخست توسط دستگاه آشکارساز و ردگیر خودکار ADT پردازش گردد که منطقه تحت پوشش رادار به سلولهای صفحه، که به طور فاصله و زاویه ازافق منظم شدهاند، تقسیم می کند همه پالسهای برگشتی رسیده به هر سلول را با هم جمع و یک آستانه ایجاد می کند (برپایه مجموع پالسهای دریافتی) که فقط به خروجی های قوی ناشی از برگشتیهای هدف اجازه عبور می دهد و نویز را حذف می کند بدین طریق مسیر هر هدف را مشخص و حفظ می کند و پس از پردازش، اطلاعات را به اپراتور نشان می دهد. عملکرد ADT معمولا توسط تکنولوژی کامپیوتر دیجیتالی قابل انجام است.
نوع معمول آنتن رادار یک آنتن انعکاسی سهموی شکل است که از یک منبع نقطه ای در کانون تغذیه میشود. منعکس کننده سهموی انرژی را در یک شعاع باریک متمرکز می کند- درست نظیر آنچه که یک نورافکن یا چراغ جلو اتومبیل انجام می دهد. شعاع آنتن ممکن است به طور مکانیکی در فضا چرخاندهشود. آنتنهای آرایه ای فازی نیز در رادارها به کار رفته اند. در یک آنتن آرایه ای فازی شعاع تشعشعی بصورت الکترونیکی با تغییر فاز جریان های روی دهانه آنتن در فضا چرخانده می شوند.
فصل دوم
رادارهای ردیاب و انواع آنها
۱-۲-ردیابی با رادار
یک سیستم رادار ردیاب، مختصات هدف را اندازه گیری کرده و اطلاعاتی را فراهم مینماید که برای تعیین مسیر هدف و پیش بینی موقعیت بعدی آن به کار می رود. تمام یا قسمتی از اطلاعات قابل دسترسی رادار، فاصله، زاویه عمودی، زاویه افق، تغییر فرکانس دوپلر – ممکن است برای پیش بینی موقعیت آینده هدف به کار رود. به عبارت دیگر رادار می تواند عمل ردیابی را با فاصله، یا با زاویه یا با دوپلر ویا ترکیبی از اینها انجام دهد. تقریباً همه رادارها را در صورتی که اطلاعات خروجی آنها به طور مناسب پردازش گردد، می توان به صورت رادار ردیاب استفاده نمود. ولی معمولاً روشی که با آن ردیابی زاویه صورت می گیرد وجه تمایز بین رادار ردیاب معمولی و دیگر رادارها می باشد. همچنین لازم است بین ردیابی پیوسته و ردیابی حین مرور تمایز قایل شویم: اولی اطلاعاتی ردیابی را بطور پیوسته می دهد، در صورتی که ردیاب حین مرور (TWS) اطلاعات نمونه برداری شده از یک یا چند هدف را فراهم می نماید. عموماً، رادار ردیاب پیوسته و رادار TWS انواع مختلفی ازدستگاهها را به کار می گیرند.
در رادار ردیاب پیوسته، شعاع آنتن بوسیله یک سرو مکانیسم که با سیگنال خطا عمل می کند، در یک زاویه خاص قرار می گیرد. برای ایجاد سیگنال خطا روشهای متعددی وجود داردکه از جمله می توان از سوئیچ کردن شعا آنتن مرور مخروطی و مرور همزمانی یا مونوپالس نام برد. برد و تغییر فرکانس دوپلر را نیز می توان به طور پیوسته، با یک حلقه سرو کنترل که با سیگنال خطای تولید شده درگیرنده رادار فعال می شود، ردیابی نمود. اطلاعات حاصل از رادار ردیاب را می توان به نمایشگر CRT داد تا اپراتور از آن استفاده نماید و یا ممکن است به یک کامپیوتر خود کار داد تا مسیر هدف و موقعیت احتمالی هدف تعیین شود.
رادار ردیاب قبل از اینکه بتواند هدف را ردیابی کند باید آن را پیدا نماید. بعضی از رادارها قبل از اینکه به وضعیت ردیابی سوئیچ کنند، برای پیدا کردن هدف در وضعیت جستجو، جویندگی کار می کنند.
اگر چه استفاده از یک رادار برای هر دوعمل جستجو و ردیابی امکان پذیر است، لیکن این گونه عملکرد معمولاً دارای چند محدودیت کاربردی است. بدیهی است که وقتی که رادار در وضعیت ردیابی کار می کند دارای هیچ دانشی از هدفهای بالقوه دیگر نیست. همچنین اگرپرتو آنتن یک شعاع مدادی باریک و حجم مکانی جستجو بزرگ باشد، زمان نسبتاً زیادی برای یافتن هدف مورد نیاز است.
بنابراین بسیاری از سیستمهای ردیابی راداری برای یافتن هدف از یک رادار جستجوی جداگانه استفاده می کنند تا اطلاعات لازم برای قفل شدن رادار ردیاب روی هدف را برای آن رادار فراهم کند. رادار جستجوگری که برای این منظور به کار می رود «رادار جوینده» نامیده میشود. رادار جوینده مشخصات هدف را با مشخص کردن مختصات آنها به رادار ردیاب می دهد ورادار ردیاب با انجام یک جستجوی محدود در منطقه که مشخصات هدف داده شده، هدف را می یابد.
رادار جستجو با شعاع تشعشعی مروری بادبزنی نیز می تواند اطلاعات لازم برای تعیین مسیر هدف و پیش بینی موقعیت بعدی آن را فراهم نماید. هر بار که شعاع آنتن مرور می کند، مختصات هدف را به دست می دهد. اگر تغییرات در مختصات هدف از یک مرور به مرور دیگر خیلی زیاد نباشد، بازسازی ردیابی هدف از اطلاعاتنمونه برداری شده امکان پذیر است، این کار را می توان با مجهز کردن اسکوپ PPI اپراتور به یک قلم برای علامت گذاری دامنههای هدف روی سطح اسکوپ انجام داد. یک خط انتقال دهنده دامنههای هدف روی سطح اسکوپ انجام داد. یک خط انتقال دهنده دامنههای مربوط به یک هدف،ردیابی هدف را فراهم می نماید.وقتی ترافیک بقدری شلوغ باشد. که اپراتور نتواند همگامی خود را با اطلاعات رادار حفظ نماید، اطلاعات مسیر هدف را می تواند به طورخود کار باکامپیوتر دیجیتالی پردازش نمود. دسترسی به مینی کامپیوترهای کوچک و ارزان، ایجاد ردیابی هدف، نه فقط دیدن هدف، توسط یک رادار جستجو را عملی نموده است. چنین پردازشی را معمولاً ADT (تشخیصی و ردیابی اتوماتیک) گویند. وقتی خروجیهای بیش از یک رادار را به طور خود کار ترکیب نمایند تا مسیرهای هدف به دست آید، پردازش را ADIT (تشخیص و ردیابی جمع بندی شدخه اتوماتیک) یا IADT (ADT جمع بندی شده) گویند.
گاهی یک رادار جستجوگر که ردیابی هدف را نیز انجام می دهد ردیابی در حین مرور گویند. این اصطلاح همچنین در مورد راداراهایی که یک قطاع کوچک را برای دستیابی به اطلاعات ردیابی با سرعت زیاد روی یک یا چند هدف مرور می کنند به کار می رود. راداراهی فرود هواپیما که برای GCA (با تمایل کنترل زمینی) یا بعضی از رادارهای کنترل موشک به کار می روند، از این نوع هستند.
وقتی از عبارت رادار ردیابی در این کتاب استفاده می شود، عموماً منظور«ردیاب پیوسته» است والا مورد دیگری ذکر شود.
۲-۲-سوئیچ کردن شعاع آنتن (Sequential lobing)
پرتو آنتن که در رادارهای ردیاب معمولاً استفاده می گردد، دارای شعاع تشعشعی مدادی متقارن می باشد که در آن پهنای شعاع افقی و عمودی تقریباً برابرند. در هر حال، یک آنتن شعاع مدادی ساده برای رادارهای ردیاب مناسب نیستند مگراینکه توانائیهایی به آن داده شود که بتواند دامنه و جهت موقعیت زاویه ای هدف را نسبت به یک جهت مرجعی مشخص نماید، که معمولاً این مرجع محور آنتن انتخاب می گردد. تفاوت فاحش بین موقعیت هدف وجهت مرجع، «خطای زاویه ای» است. چرخش آنتن رادار ردیاب در جهتی است که خطای زاویه ای صفر گردد. وقتی که خطای زاویه صفر شد، هدف جهت مرجع را خواهد داشت.
یکی از روشهای بدست آوردن دامنه و جهت خطای زاویه ای در یک مختصات، سوئیچ کردن شعاع آنتن به طور متناوب بین دو موقعیت است (شکل ۱-۲). این روش را، سوئیچ کردن شعاع آنتن، سوئیچینگ ترتیبی و یا تغییر پیوست شعاع آنتن گویند. شکل (۱-۲-الف) یک نمایش قطبی از شعاع آنتن (بدون گلبرگهای فرعی) در دو موقعیت سوئیچ می باشد. شکل (۱-۲-ب) نمایش در مختصات مستطیلی را نشان می دهد. سیگنال خطای به دست آمده برای هدفی که در جهت مرجع نباشد (محور سوئیچینگ) نشان داده شده است.
اختلاف دامنه ولتاژ دو موقعیت معیاری برای اندازه گیری جابجایی زاویه ای هدف ازمحور سوئیچینگ می باشد. علامت تفاضل ولتاژ، جهت حرکت آنتن را مشخص می کند، بطوری که جهت محور سوئیچینگ در جهت هدف قرار گیرد.وقتی که دامنه ولتاژ هر دو موقعیت برابر شوند، هدف روی محور سوئیچینگ بوده و بدین ترتیب می توان جهت هدف را معین نمود.
برای به دست آوردن خطای زاویه در صفحه عمود براین صفحه دو موقعیت سوئیچینگ اضافی دیگر نیاز است. بنابراین یک رادار دو بعدی با سوئیچنیگ شعاع آنتن می تواند شامل چهار آنتن بوقی تغذیه خوشه ای باشد که یک تک آنتن را روشن می نمایند، بطوری که قطاعهای چپ – راست و بالا – پایین با موقعیتهای پشت سر هم آنتن پوشانده شود. ارسال و دریافت در هر موقعیت انجام میشود. یک خوشه با پنج آنتن تغذیه نیز ممکن است به کار رود، بطور که آنتن تغذیه مرکزی برای فرستنده و چهار آنتن دیگر برای گیرنده به کار رود. در این حالت به سوئیچهای RF توان بالا نیازی نیست زیرا فقط شعاعهای گیرنده در این پنج آنتن تغذیه تغییر داده میشود.
یکی از محدودیتهای آنتن شعاع مدادی بدون سوئیچ و بدون مرور این است که دقت زاویه ای نمی تواند بهتر از پهنای شعاع تشعشعی آنتن باشد. یک مشخصه برجسته سوئیچینگ شعاع آنتن (همچنین دیگر روشهای ردیابی که بحث خواهد شد) این است که دقت تعیین موقعیت زاویه ای هدف خیلی بهتر از شعاع آنتن می گردد. این دقت بستگی به آن دارد که تا چه اندازه برابری سیگنالها در موقعیتهای سوئیچ شده را بتوان تعیین نمود. محدودیت اصلی در این دقت، نویز سیستم است که در اثر تغییرات مکانیکی و الکترونیکی ایجاد می گردد.
سوئیچینگ شعاع آنتن یکی از اولین روشهای استفاده شده در رادار ردیابی است. کاربردهای اولیه آن در رادار فرود هوائی که اطلاعات جهت نشستن هواپیما را فراهم می کرد. و همچنین دررادارهای کنترل آتش زمینی ضد هوا بوده است. ولی امروزه این تکنیک کمتر از تکنیک کمتر از تکنیکهای دیگر به کار می رود.
۳-۲-مرور مخروطی (Conical Scan)
یک بسط منطقی از تکنیک سوئیچینگ شعاع آنتن، که در قسمت قبل تشریح شد، چرخاندن پیوسته شعاع آنتن منحرف شده بجای چرخش ناپیوسته بین چهار موقعیت گسسته است. این روش مرور مخروطی نام داد (شکل ۲-۲). زاویه بین محور چرخش (که معمولاً-ولی نه همیشه- محور آنتن انعکاسی است) و محور شعاع تشعشعی آنتن را زاویه چپ شدگی گویند. یک هدف در موقعیت A را در
شکل ۱-۲- پرتروهای تشعشعی سوئیچینگ شعاع آنتن و سیگنال خطا (یک بعدی) الف- نمای قطبی پرتوتشعشعی ب- نمایش مستطیلی ج- سیگنال خطا نظر بگیرید. سیگنال های برگشتی بستگی به شکل پرتو آنتن زاویه چپ شدگی زاویه بین خط دید هدف و محور چرخش دارد. فاز مدولاسیون بستگی به زاویه بین محورهدف و محور چرخشی دارد. مدولاسیون مرور مخروطی را از سیگنال برگشتی استخراج و به سیستم سرو کنترل اعمال می گردد تا به طور پیوسته مومقعیت آنتن چرخش دارد. مدولاسیون روی هدف را قفل می کند. (توجه شود که دو نوع سرو لازم است و چون مساله ردیابی دو بعدی است مختصات ردیابی قطبی یا مستطیلی (افقی- عمودی) می تواند به کار رود.( وقتی آنتن هدف باشد مطابق هدف B در شکل فوق خط دید هدف و محور چرخش منطبق و مدولاسیون مرور مخروطی صفر می گردد.
شکل (۲-۲)- ردیابی مخروطی
شمای بلوکی قسمت ردیابی زاویه یک رادار مرور مخروطی در شکل (۳-۲) نشان داده شده است. آنتن طوری سوار شده که بتواند با موتورهای جداگانه در صفحه افق و صفحه عمود حرکت کند. این حرکت ممکن است الکتریکی یا هیدرولیکی باشد. شعاع آنتن را می توان با کج کردن Tilting))عناصر تغذیه و یا منعکس کننده و یا منعکس کننده نسبت به هم منحرف کرد.
شکل ۳-۲ بلوک دیاگرام رادار مرور مخروطی
یکی از ساده ترین آنتن های مرور مخروطی یک سهمی است که دارای تغذیه منحرف شده است به طوری که حول محور سهمی می چرخد. اگر عنصر تغذیه در حال چرخش، صفحه پلاریزاسیون ثابتی داشتاه باشد به آن تغذیه چرخان (Nutating) گویند. تغذیه چرخان باعث تغییر در پلاریزاسیون می گردد، لذا نیاز به وجود اتصال چرخشی (مفصل چرخشی) می باشد. تغذیه چرخان احتیاج به مفصل انعطاف پذیر دارد. اگر آنتن کوچک باشد، چرخاندن بشقاب (صفحه انعکاسی) نسبت به چرخاندن تغذیه برای انحراف ساده تر است. در این صورت احتیاجی به مفصل چرخشی یا اتصال RF انعطاف پذیر نیست. سرعت چرخش مرور مخروطی معمولا ۳۰ دور در ثانیه می باشد. همان موتوری که چرخش مرور مرخروطی را ایجاد می نماید. مودل دو فاز مرجع با خروجی های ۹۰ درجه اختلاف فار را نیز تغذیه می کند. این دو خروجی به عنوان مرجع برای استخراج خطاهای افقی و عمودی به کار می روند. سیگنال برگشتی دریافتی از آنتن توسط دو مفصل چرخشی (در شمای بلوکی نشان داده شده است) به گیرنده می رسد. یک مفصل چرخشی باعث حرکت در صفحه افق و دیگری باعث حرکت در صفحه عمودی می گردد.
گیرنده یک نوع سوپر هترودین معمول می باشد منتها دارای مشخصات خاصی برای رادار ردیاب مرور مخروطی است. یکی از مشخصاتی که در دیگر گیرنده ها یافت نمی شود استخراج مدولاسیون مرور مخروطی ای سیگنال خطای است که بعد از دومین آشکار ساز در قمست ویدئو گیرنده انجام می پذیرد. سیگنال خطا است که بعد از دومین آشکار ساز در قسمت ویدئو گیرنده انجام می پذید. سیگنال خطا با سیگنال های مرجع افقی و عمودی توط آشکار سازهای خطای زاویه مقایسه می گردد. این آشکار سازها از نوع حساس به فاز هستند. یک آشکار ساز حساس به فاز عنصری غیر خطی است که در آن سیگنال ورودی (در این حالت سیگنال خطای زاویه) با سیگنال مرجع مخلوط می گردد. سیگنال های ورودی و خروجی دارای فرکانس یکسان هستند.
ولتاژ dc خروجی آشکار ساز با تغییر فاز سیگنال ورودی به اندازه ۱۸۰ درجه تغییر علامت می دهد. دامنه خروجی dc آشکار ساز خطای زاویه متناسب با خطا است. و علامت آن جهت را نشان می دهد. خروجی این آشکارساز، تقویت شده و به سرو موتورهای افقی و عمودی اعمال می گردد.
موقعیت زاویه های هدف را می توان از محور افقی و عمودی آنتن به دست آورد و به وسیله مبدل های زاویه (استاندارد) نظیر سنکرو، پتانسیومتر، مبدلهای اطلاعات آنالوگ به دیجیتال آن را خواند.
۴-۲-مولد باکسار (Boxcar Generator)
وقتی مدولاسیون تحمیلی به قطار پالس های باریک تکراری استخراج می گردد، معمولا بهتر است که پالس ها قبل از فیلتر شدن توسط فیلتر پائین گذر گسترده (Strech) شوند. این عمل را «باکسار» یا نمونه برداری و حفظ مقدار نمونه و به دستگاه مربوط مولد باکسکار می گویند. در بحث MTI وقتی فیلترخهای با دورازه بندی فاصله (range Gated) مورد استفاده قرار می گیرد از باکسکار نیز استفاده می گردد. در اصل این عنصر باعث گسترده شدن پالس های شکل (۴-۲) در زمان می گردد. به طوری که کل پریود تکرار پالس را بپوشاند. (شکل ۴-۲ب). این عمل فقط در یک گیرنده با دروازه بندی فاصله ممکن است (رادارهای ردیاب معمولا با دروازه های فاصله کار می کنند).
شکل (۴-۲) الف) الف) قطار پالس با مدولاسیون مرور مخروطی
شکل (۴-۲ –ب) همان قطار پالس پس از عبور از جنراتور باکسار
۵-۲-کنترل خودکار بهره AUTOMATIC Gain Control (AGC)
دامنه سیگنال برگشتی در گیرنده رادار ردیاب ثابت نخواهد بود. بلکه با زمان تغییر میکند. سه علت عمده تغییرات در دامنه عبارتند از: ۱)رابطه معکوس می توان چهارم فاصله بین سیگنال برگشتی و فاصله ۲)مدولاسیون مرور مخروطی (سیگنال زاویه) و ۳) تغییرات دامنه و در سطح مقطع راداری هدف. عمل کنترل خودکار بهره (AGC) ثابت نگهداشتن سطح dc خروجی گیرنده و حذف هر نوع تغییرات دامه شبه نویز و صاف کردن دامه بدون تخریب استخراج سیگنال خطای مورد نظر در فرکانس مرور مخروطی تا حد امکان است.
یکی از هدف های AGC در گیرنده، جلوگیری از اشباع گیرنده در اثر سیگنال های بزرگ است زیرا اگر گیرنده اشباع شود، مدولاسیون مرور و سیگنال خطا از دست می رود. در رادار ردیاب مرور مخروطی یک AGC که سطح dc را ثابت نگه می دارد. باعث ایجاد یک سیگنال خطا می گردد. که نشان واقعی از خطای زاویه ای است. اگر بخواهیم خطای زاویه ای به طور خطی متناسب با ولتاژ سیگنال خطای زاویه باشد بایستی سطح dc گیرنده ثابت است.
یک مثال از قمست AGC یک گیرنده رادار ردیاب در شکل (۵-۲) نشان داده شده است. قسمتی از خروجی تقویت کننده ویدئو از فیلتر پائین گذر با فیلتر هموار کننده عبور داده شده و به تقویت کننده IF فیدبک میشود تا بهره آن را کنترل نماید. هر چه خروجی ویدئو بزرگتر باشد سیگنال فیلد بک بزرگتر خواهد بود و در نتیجه کاهش بهره بیشتر می گردد. فیلتر در حلقه AGC بایستی تمام فرکانس های از صفر تا درست قبل از فرکانس مدولاسیون مرور مخروطی را از خود عبور دهد. بهره حلقه AGC در فرکانس مرور مخروطی باید کم باشد تا سیگنال خطا تحت تاثیر عملکرد AGC قرار نگیرد. (اگر AGC به فرکانس مرور مخروطی پاسخ بگوید ممکن است سیگنال خطا از دست برود.) تغییر فاز این فیلتر بایستی کم باشد تا مشخصه فازی آن روی سیگنال خطا تاثیر نگذارند. یک تغیر فاز در سیگنال خطا معادل چرخش محورهای مرجع و ایجاد کوپلاژ متقابل و یا «تداخل» بین حلقه های ردیاب زاویه ای افق و عمودی می باشد. Cross Task روی پایداری ردیابی اثر می گذارد و ممکن است سبب حرکت ناخواسته چرخشی آنتن گردد. در رادارهای ردیاب مرسوم تغییر فاز ایجاد شده توسط فیلتر حلقه فیدبک کمتر از ۱۰ درجه می باشد که در بعضی کاربردها بایستی کمتر از ۲ درجه باشد. به این دلیل یک فیلتر بامشخصه تضعیف تیز و ناگهانی در نزدیکی فرکانس مرور مخروطی مناسب نیست. چون تغییر فاز نسبتاً بزرگی را ایجاد خواهد کرد.
خروجی حلقه فیدبک صفر است، مگر آنکه ولتاژ فیدبک از یک ولتاژ حداقل از قبل مشخص شده (Vc) بیشتر گردد. در شمای بلوکی ولتاژ فیدبک و ولتاژ Vc در تقویت کننده dc مقایسه می گردند. اگر ولتاژ فیدبک بیشتر از Vc شود AGC کار می کند وگرنه عملی انجام نمی دهد ولتاژ Vc را ولتاژ تاخیر (Delay Voltage) می گورند. البته تاخیر در دامنه اتفاق می افتد و نه در زمان. هدف ولتاژ تاخیر فراهم کردن یک مرجع برای سیگنال خروجی ثابت و ایجاد بهره برای سیگنال های ضعیف می باشد. اگر ولتاژ صفر شود هر خروجی که در گیرنده ظاهر گردد ممکن است در اثر ضعف مدار AGC برای تنظیم کامل باشد.
شکل (۵-۲)- شمای بلوکی قسمت AGC یک گیرنده رادار ردیاب
در بسیاری از کاربردهای AGC مقداری ولتاژ تاخیر صفر است. به این نوع AGC غیر تاخیری (Undelayed) گویند. در این حالات، AGC هنوز می تواند به طور قابل قبولی انجام وظیفه کند زیرا بهره حلقه معمولا برای سیگنال های کوچک کم باشد. بنابراین AGC سیگنال های ضعیف را تنظیم نخواهد کرد. اثر آن داشتن ولتاژ تاخیر می باشد ولی کارآئی آن در حد مطلوب نیست.
محدوده کاری مورد نیاز AGC بستگی به تغییرات فاصله ای که هدف در آن ردیابی می گردد و همچنین تغیرات سطح مقطع هدف مورد نظر دارد. اگر تغیرات فاصله ۱۰ به ۱ باشد سهم آن در محدوده کار ۴۰ دسی بل است. سطح مقطع هدق نیز ممکناست حدود ۴۰ دسی بل تغییرات ایجاد نماید. مقدار ۱۰ دسی بل جهت در نظر گرفتن اثرات دیگر در معادله رادار بایستی در نظر گرفت بنابراین محدوده کار مورد نیاز AGC گیرنده باید در حدود ۹۰ دسی بل بیشتر باشد.
در عمل تغییرات حداکثر بهره که می توان با یک طبقه منفرد IF به دست آورد حدود ۴۰ دسی بل می باشد. بنابراین بهره دو یا سه طبقه تقویت کننده IF بایستی کنترل می شوند، زیرا اولین طبقه باید دارای بهره زیاد باشد تا روی عدد نویز مخلوط کننده تاثیری نگذارد. همچنین بهتر است که طبقه آخر کنترل نگردد زیرا وقتی که بهره آن با اعمال ولتاژ کنترل کم می گردد حداکثر خروجی بدون اعوجاج یک طبقه تقویت کننده کم میشود.
به جای طرح فیلتر AGC می توان بهره حلقه AGC را برای فرکانس های خیلی بالاتر از فرکانس مرور مخروطی زیاد انتخاب کرد. مدولاسیون مرور در خروجی گیرنده را می توان حذف کرد. در این حالت می توان سیگنال خطا را از ولتاژ AGC استخراج کرد. زیرا این سیگنال با فرکانس مرور مخروطی تغییر می کند. ولتاژ AGC که با سیگنال برگشتی ظاهر می گردد دارای تغییرات دامنه نیز هست سیگنال خطا را می توان با یک فیلتر باند باریک به فرکانس مرکزی فرکانس مدولاسیون مرور مخروطی از ولتاژ AGC استخراج کرد.
۶-۲-زاویه چپ شدگی Squint angle))
ولتاژ سیگنال خطای زاویه برحسب تابعی از ، زاویه بین محور چرخشی و جهت هدف در شکل (۶-۲) رسم شده است. زاویه چپ شدگی زاویه بین محور شعاع آتن و محور چرخش می باشد و پهنای شعاع نیم توان است. در محاسبات شکل (۶-۲) شکل شعاع تشعشعی آنتن با تابع گوسی تقریب زده شده است. هر چه ضریب زاویه سیگنال خطا بزرگتر باشد ردیابی هدف دقیقتر خواهد بود. حداکثر ضریب زاویه سیگنال خطا بزرگتر باشد ردیابی هدف دقیقتر خواهد بود. حداکثر ضریب زاویه برای مقدار کمی بیشتر از ۴/۰ اتفاق می افتد. این مربوط به یک نقطه روی پرتو آتن می باشد. که حدود ۲ دسی بل از پیک پرتو کمتر است. رویهم اتفادگی پرتو بهینه برای حداکثر کردن دقت ردیابی زاویه است. ولی دقت ردیابی فاصله بستگی به تلقات سیگنال دارد و نه ضریب زاویه در نقطه روی هم افتادگی. بنابراین به عنوان یک مصالحه بین شرایط دقت ردیابی برد و زاویه، نقطه روی هم افتادگی پرتو، نزدیک پیک شعاع تشعشعی آنتن معمولا انتخاب می گردد و نه آنچه در شکل (۶-۲) نشان داده شده است. توصیه شده است که مقدار حدود ۲۸/۰ انتخاب گردد. که این مربوط به نقطه ای روی پرتو تشعشعی آنتن است که حدود ۱ دسی بل کتر از پیک است.
سایر ملاحظات. در هر دو تکنیک سوئیچینگ شعاع آنتن و مرور مخروطی اندازه گیری خطای زاویه در دو مختصات متعامد (افق و عمود) نیاز به حداقل سه پالس برای پردازش دارد. اما در عمل تعداد حداقل پالس ها در سوئیچینگ شعاع آتن به ازای هر ربع مختصات یک پالس چهار می باشد. اگر چه ممکن است رادار مرور مخروطی با چهار پالس کا رکند ولی معمولا به ازا هر گردش ده پالس یا بیشتر به کار می رود. بدین ترتیب مدولاسیون در اثر خطای زاویه بیشتر می گردد. بنابراین prf معمولا بزرگتر از فرکانس مخروطی می باشد. فرکانس مرور بایستی حداقل بزگرت از پنهای باند ردیابی گردد.
یک رادار مخروطی در حالت تنها گیرنده (COSRD) یک شعاع بدون مرور ارسال ولی با شعاع مرور مخروطی دریافت می کند تا خطای زاویه را استخراج نماید. عملکرد متناظر با سوئیچینگ شعاع آنتن را LORD گویند.
شکل ۶-۲ سیگنال خطای زاویه رادار مخروطی بر حسب زاویه هدف و زاویه چپ شدگی پهنای شعاع تشعشعی آنتن
فصل سوم
رادار ردیاب تک پالس
۱-۳-اصول عملکرد رادار ردیاب تک پالس
رادارهای ردیاب مرور مخروطی و سوئیچینگ شعال آنتن به تعداد حداقلی پالس نیاز دارند تا بتوانند سیگنال خطا را استخراج نمایند.در فاصله زمانی طول آن اندازه گیری با مرور مخروطی با سوئیچینگ شعاع آنتن انجام می گیرد، قطار پالس های برگشتی بایستی دارای مولفه مدولاسیون دامنه غیر از مدولاسیون ایجاد شده در اثر مرور نباشد. اگر قطار پالس برگشتی شامل مولفه های دیگر مدولاسیون باشد که قبلا در اثر تغیرات سطح مقطع راداری ایجاد شده دقت ردیابی کاهش می یابد، خصوصا اگر مولفه فرکانس آن دارای تغییراتی برابر یا نزدیک فرکانس مرور مخروطی یا سرعت سوئیچینگ شعاع آنتن باشد. اثر تغییرات سیگنال برگشتی می تواند در بعضی از کاربردها، به طور جدی دقت رادار های ردیابی را که نیاز به پالس های زیادی برای پردازش و استخراج خطا دارند محدود نماید.
اگر اندازه گیری زاویه بر اساس یک پالس و نه چند پالس انجام پذیرد تغییرات دامنه سیگنال خطا از یک پالس به پالس دیگر انرژی دقت ردیابی ندارد. برای به دست آوردن اطلاعات خطای زاویه با یک پالس چند روش وجود دارد. در این روش ها بیش از یک شعاع آنتن (برعکس ردیافب های مرور مخروطی یا سوئیچ کننده شعاع آنتن) به طور همزمان به کار گرفته میشود. اگر فاز نسبی یا دامنه نسبی پالس سیگنال دریافتی در هر شعاع اندازه گیری گردد زاویه دریافت سیگنال برگشتی را می توان با سیستم یک پالسی تعیین کرد. نام مرور همزمانی و تک پالسی برای روش های ردیابی ای استفاده شده است که اطلاعات خطای زاویه را بر اساس یک تک پالس به دست می آورد.
یک مثال از تکنیک مرور همزمانی مقایسه گر دامنه تک پالسی
(Amplitude-Comparsion- Monopuls) یا به طور ساده تک پالسی (Monopuls) است. در این روش سیگنال های RF توسط دو شعاع آنتن منحرف شده دریافت و با هم ترکیب می گردند. به طوری که مجموع و تفاضل دو سیگنال به طور همزمان به دست آید. سیگنال های مجموع و تفاضل در یک آشکارساز حساس به فاز ضریب می گردد تا دامنه و جهت سیگنال خطا به دست آید. بدین طریق همه اطلاعات لازم برای تعیین خطای زاویه ای بر اساس تک پالس معین می گردد و لذا نام تک پالس برای آن کاملا مناسب است.
۲-۳-مقایسه گر دامنه تک پالسی
مقایسه گر دامنه تک پالسی برای به دست آوردن سیگنال خطا در یک مختصات از دو پرتو آنتن روی هم افتاده استفاده می کند (شکل ۱-۳ الف). دو شعاع آنتنی روی هم افتاده را می توان توسط یک منعکس کننده و یا آنتن لنز که با دو عنصر تغذیه نزدیک به هم روشن شده به دست آورد. (اگر هر دو سیگنال خطای افقی و عمودی لازم باشد می توان عنصر تغذیه خوشه ای و چهارتائی به کار برد). در شکل (۱-۳-ب) مجموع و در شکل (۱-۳-ج) تفاضل پرتوهای تشعشعی دو آنتن دو شکل (۷-۳-الف) رسم شده است. از پرتو مجموع برای فرستندگی و از ه ردو پرتو مجموع و تفاضل دامنه خطای زاویه دار معین می کند و سیگنال دریافتی با پرتو مجموع اندازه گیری فاصله را ممکن می سازد و همچنین به عنوان یک مرجع برای استخراج علامت سیگنال خطا به کار میرود. سیگنال های دریافتی از پرتوهای مجموع و تفاضل مستقلا تقویت شده و در یک آشکار ساز حساس به فاز ترکیب می گردند. تا مشخصه سیگنال خطا را به دست دهند، که در شکل (۷-۲-د) نشان داده شده است.
شمای بلوکی یک رادار دریاب مقایسه گر دامنه تک پالسی برای یک مختصات زاویه ای در شکل (۱-۲) نشان داده شده است. دو آنتن تغذیه مجاور به دو بازو از یک اتصال هایبرید نظیر T جادوئی و یا raterace و یا کوپلر شکاف کوتاه وصل شده است. سیگنال های مجموع و تفاضل در دو بازوی دیگر اتصال هایبرید ظاهر می گردند. در حالت گیرندگی خروجی های بازوی مجموع و بازوی تفاضل توسط یک مخلوط کننده به فرکانس میانی انتقال می یابند. که توسط تقویت کننده IF تقویت گردند و فرستندده به بازوی مجموع وصل میشود. اطلاعات فاصله نیز از یک بازوی مجموع اضافه میشود. خروجی آشکارساز حساس به فاز یک سیگنال خطا است که دامنه اش با خطای زاویه ای و علامتش متناسب با جهت است.
از خروجی های رادار تک پالس برای ایجاد ردیابی خودکار استفاده میشود. خطای زاویه سیگنال یک سیستم سرو کنترل را راه می اندازه تا موقعیت آنتن را تنظیم نماید. خروجی برد از کانال مجموع به واحد ردیابی خودکار فاصله تغذیه می گردد.
علامت سیگنال (و جهت خطای زاویه ای) با مقایسه اختلاف فاز سیگنال تفاضل با فاز سیگنال تفاضل با فاز سیگنال مجموع معین می گردد. اگر سیگنال مجموع در قسمت IF گیرنده )) باشد سیگنال تفاضل برابر یا خواهد بود. () بسته به آنکه هدف در کدام طرف مرکز باشد. بنابراین برای تعیین علامت سیگنال تفاضل، کافی است بررسی گردد که سیگنال تفاضل با سیگنال مجموع هم فاز است به ۱۸۰ درجه اختلاف فاز دارد.
شکل (۲-۳)- شمای بلوکی برادار تک پالس دامه مقایسه گر دامنه (یک بعدی)
اگرچه مقایسه فاز بخشی از رادار تک پالسی مقایسه گر دامنه است، ولی سیگنال خطای زاویه ای اصولا با مقایسه دامنه های سیگنال برگشتی از شعاع های منحرف شده همزمان به دست می آید. از رابطه فازی بین سیگنال ها در شعاع های منحرف شده استفاده نشده است. وظیفه آشکار ساز حساس به فاز تعیین علامت سیگنال خطا است.
شمای بلوکی رادار تک پالس یا پیش بینی لازم برای استخراج سیگنال های خطا در صفحه افق و صفحه عمودی در شکل (۳-۳) نشان داده شده است. خوشه با چهار عنصر تغذیه چهار شعاع تشعشعی ایجاد می نماید. نیمه نیمه روی هم افتاده اند. عناصر تغذیه ممکن است با منعکس کننده سهموی، آنتن کاسگرین یا لنز، استفاده گردند. چهار عنصر تغذیه با هم پرتو مجموع را ایجاد می کنند. پرتو تفاضل در یک صفحه با جمع دو تغذیه مجاور و کم کردن آن از مجموع دو تغذیه دیگر به دست می آید. چهار اتصال هایبرید کانال مجموع کانال تفاضل افقی و کانال تفاضل صفحه عمودی را ایجاد می کنند. سه مخلوط کنده و سه تقویت کننده if جداگانه برای هر کانال لازم است. همه مخلوط کننده ها از یک نوسانگر محلی تغذیه می گردند تا رابطه های فاز بین سه کانال حفظ شود. دو آشکارساز حساس به فاز اطلاعات خطای زاویه ای را استخراج می کند (یکی برای صفحه افقی و دیگری برای صفحه عمودی). اطلاعات فاصله از خروجی کانال مجموع پس از آشکار سازی دامنه استخراج می گردد.
چون مقایسه فاز بین خروجی کانال های مجموع و تفاضل انجام می گیرد، لازم است که اختلاف فاز ایجا شده توسط هر یک از کانال ها یکسان باشد. بر اساس ادعای آقای پیچ (Page) اختلاف فاز بین دو کانال باید کمتر از ۲۵ درجه باشد تا عملکرد خوبی به دست اید. همچنین بهره کانال ها نبایستی تفاوت چندانی با هم داشته باشد.
به جای استفاده از سه تقویت کننده IF مشابه می توان یک کانال IF برای سیگنال مجموع و دو سیگنال تفاضل بر اساس یک شرکت زمانی به کار برد. سیگنال مجموع از یک تقویت کننده IF عبور داده میشود. و به دنبال آن دو سیگنال تفاضل با تاخیر زمانی مناسبی عبور داده می شوند. بیشترین بهره و کنترل بهره در تقویت کننده IF ایجاد می گردد. هر تغییری برای سه سیگنال یکسان است. پس از تقویت کننده تاخیرات جبرانی برای تصحیح زمانی به کار می رود تا سیگنال مجموع و دو سیگنال تفاضل به تطابق زمانی آورده شوند. آشکار سازی فاز نظیر حالت تک پالس معمولی انجام می گیرد. یک سیستم یک کانالی دیگر (SCAMP) سیگنال های مجموع و دو تفاضل را به فرکانس های IF تبدیل و سپس به طور همزمان آنها را در یک تقویت کننده با باند وسیع تقویت می نمایند.خروجی به دقت محدود (Hard-Limited) می گردد تا خاصیت AGC لحظه ای ایجاد گردد. سه سیگنال پس از محدود شدن با یک فیلتر باند باریک جداسازی شده به فرکانس IF یکسان تبدیل می گردند تا تحت پردازش های دیگر قرار گیرند. البته عمل محدود سازی دقیق باعث کوپلاژ متقابل بین کانال های سیگنال خطای افقی و عمودی می گردد و ممکن است خطای قابل ملاحظه ای ایجاد شود. گیرنده های تک پالس دو کانالی نیز برای ترکیب مجموع و دو تفاضل سیگنال ها به طریقی که دوبار بتوان هر سه مولفه را پس از تقویت جداساز نموده به کار می روند.
شکل (۳-۳) شمای بلوکی رادار تک پالس مقایسه گر دامنه دو بعدی (افقی و عمودی)
علت استفاده از گیرنده تک پالسی تک کانالی یا دو کانالی آسان کردن مساله حفظ فاز یکسان و دامنه متقارن بین سه کانال گیرنده معمول است. این تکنیک ها برای این منظور دارای مزایایی است لیکن می تواند باعث کوپلاژ ناخواسته بین کانال های افقی و عمودی و افت نستب سیگنال به نویز گردند.
آنتن مونو پالس بایستی در محل تلاقی شعاع های تشعشعی پرتو مجموع با کارآئی بالا (حداکثر بهره در زاویه دید) و پرتو تفاضل با ضریب زاویه زیاد ایجاد نماید. علاوه بر این گلبرگ های فرعی پرتوهای مجموع و تفاضل باید کم باشد. آنتن باید دارای پهنای باند لازم و پرتوها دارای مشخصه پلاریزاسیون مورد نظر باشند. جای تعجب نیست که رسیدن به این خصوصیات همواره به طور همزمان امکان پذیر نباشد. همیشه طراحی آنتی قسمت مهمی از طراحی موفقیت آمیز رادار مونو پالس می باشد.
روشنائی یکنواخت دهانه آنتن باعث بازدهی حداکثر آنتن و در نتیجه بهره حداکثر آن می گردد. روشنائی دهانه که باعث حداکثر ضریب زاویه پرتو تفاضلی گردد دارای توزیع خطی و تقارن فرد نسبت به مرکز دهانه می باشد. هر دو نوع این روشنایی ها گلبرگ های فرعی قابل ملاحظه ای ایجاد می کنند اما با یک سیستم چهار آنتنی نمی توان آنها را به دست آورد. پرتوهای مجموع وتفاضل لازم است.
روشنایی تقریباً آرمانی تغذیه دهانه یک آنتن تک پالس در شکل (۴-۳) نشان داده شده است. در بعضی از رادارهای ردیاب دقیق این تغذیه با پنج آنتن بوقی تغذیه تقریب زده شده است که یک آنتن بوقی در وسط برای ایجاد پرتو مجموع و چهار آنتن بوقی دیگر در اطرافی آن پرتوهای تفاضل را ایجاد می نمایند. تقریب دیگری که برای طراحی آرمانی به کار رفته اند شامل تغذیه دوازده آنتن بوقی و یک تغذیه شامل چهار قوب فشرده در یک صفحه که هر یک سه مود موجبری در صفحه دیگر ایجاد می نماید می باشد. مودهای درجهبالای موجب بری برای ایجاد پرتوهای مجموع و تفاضل توسط یک آنتن بوقی به کار رفته اند. بدون ایکه نیازی به مدارهای ترکیبی زیر موجی باشند.
این نوع تغذیه ها به تغذیه های چند مودی مشهورند. استفاده از مودهای درجه بالای موجبری برای ایجاد پرتوهای مورد نظر در آنتن تک پالس به آنتن های تغذیه ای منجر می گردد که دارای بازدهی بالا کوچک سازده، تلفات کم، سبک مانع در مقابل دهانه کوچک پایداری فرکانس عالی می باشد.
شکل (۴-۳) روشنائی تقریبا تغذیه دهانه آنتن تک پالس برای کانال های مجموع و تفاضل
هر چه نسبت سیگنال به نویز بزرگتر و ضریب زاویه سیگنال خطا در نزدیکی صفر و سیگنال خطا شیب دار باشد اندازه گیری زاویه دقیقتر می گردد. ضریب زاویه سیگنال خطا برحسب زاویه چپ شدگی یا تلاقی شعاع های آنتن در شکل (۱۱-۲) نشان داده شده است. حداکثر ضریب زاویه در محل تلاقی شعاع ها ۱/۱ دسی بل اتفاق می افتد.
برای پایئدار نگهداشتن حلقه بسته به سرویستم های ردیاب زاویه ای استفاده از AGA الزامی است. AGA در یک رادار تک پالس با به کارگیری یک ولتاژ متناسب با خروجی IF کانال مجموع برای کنترل بهره هر سه کانال گیرنده انجام می پذیرد. AGA باعث ایجاد یک حساسیت ثابت مستقل از اندازه هدف و فاصله می گردد.با AGC خروجی اشکار ساز خطای زاویه متناسب با نسبت سیگنال تفاضل به سیگنال مجموع میشود. (خروجی کانال مجموع ثابت است).
شکل (۵-۳) ضریب زاویه سیگنال خطا در تقاطع اشعه برای ردیابی درریاب تک پال سمرور مخروطی. پنهای شعاع تشعشعی نیم توان سو زاویه چپ شدگی .
۳-۳-سیستم ردیابی هایبرید
نام های کونوپالس و مرور با جبارن برای سیستم های ردیابی هایبرید که ترکیبی از مرور مخروطی و تک پالسی می باشد به کار برده میشود. دو شعاع زاویه دار نظیر تک پالس مقایسه گر دامنه با محورهای مختصات تکی در فضای حول محور دید هدف مرور میشود. در کونوپالس سیگنال های دریافتی مجموع و تفاضل که از دو شعاع دریافت و به روش مشابه سیستم تک پالس معمولی ایجاد می گردد. اطلاعات زاویه ای دو مختصاتی بامرور شعاع ها حول محور دید هدف نظیر استخراج اطلعات زاویه افقی و عمودی در ردیابی مرور مخروطی به دست می آید تغییرات سیگنال برگشتی ا زهدف باعث خرابی دقیت ردیابی به میزان ردیاب مرور مخروطی نمی گردد. زیرا سیگنال تفاضلی از دو خروجی همزمان دو شعاع زاویه دار استخراج میشود. اما ضرورت مرور شعاع به معنی آن است که یک حدس برای زاویه یک پالس مشابه آنچه در تک پالس اتفاق می افتد به دست نمی آید.
یک مزیت عمده روش ردیابی هایبرید ان است که نظیر تک پالس تغییرات دامنهه در دقت ردیابی موثر نیست و سادگی مرور مخروطی حفظ می گردد. هر دو این ادعاها قابل بحث نیستند.
اگر به جای سه گیرنده در تک پالسی به دو گیرنده نیاز است چرخش مکانیکی دو شعاع زاویه دار به سادگی به دست نمی آید وعمل Nutation که پلاریزاسیون را حفظ می کند. مشکلتر می باشد. چرخش شعاع باعث چرخش صفحه پلاریزاسیون و آن هم به نوبه خود باعث تغییرات ناخواسته دامنه هدف با سرعت مرور می گردد. اگرچه از نظر تئوری در پردازش تک پالسی این نوع تغییرات حذف می گردد لیکن در عمل حذف کامل صورت نمی گیرد. و باعث خطای زاویه ای میشود. با تکنولوژی نیمه هادیهای مدرن ساخت سومین گیرنده در ردیاب تک پالسی به مشکلی ساخت یک مرور کننده دو شعاعی Squinted مناسب نمی باشد.
به طور کلی می توان گفت که سیستم ردیاب تک پالسی مقایسه گر دامنه بر روش هایبرید ترجیح داده میشود.
۴-۳-ردیابی تک پالس با مقایسه گر فاز
روش های ردیابی که تاکنون بحث شد بر اسا مقایسه دامنه سیگنال های برگشتی از دو یا چند آنتن استوار است. در روش های مرور مخروطی و سوئیچینگ شعاع آنتن یک شعاع آنتنی مشترک به کار می رود در صورتی که در روش تک پالس دو شعاع یا بیشتر به طور همزمان استفاده میشود. تفاوت دامهنه در اثر موقعیت های مختلف شعاع آنتن مناسب با خطای زاویه است. با مقایسه اختلاف فاز بین سیگنال های دو آنتنی جداگانه می توان زاویه دریافت موج را مشخص کرد. در سیستم های مقایسه گر فاز برخلاف مقایسه گر دامنه آنتن های دارای یک محور هستند محور انتن ها موازی است و در نتیجه آن ها یک حجم یکسان از فضا را روشن می کنند. ضرورتاً دامه سیگنال های انعکاسی از هدف هایی که توسط آنتن ها دریافت می گردد یکسانی ولی فاز آنها متفاوت می باشد. اندازه گیری زاویه دریافت با مقایسه فاز سیگنال های دریافتی از آنتن های جداگانه در تداخل رادیویی به طور وسیعی توسط ستاره شناسان رادوئی برای اندازه گیری دقیق موقعیت ستارگان رادیویی به کار گرفته شده است. این نوع ابزارها دستگاه های غیر فعالی هستند به عبارت دیگر منبع انرژی تشعشع یافته خود هدف می باشد. یک رادار ردیاب که با اطلاعات فاز کار می کند نظیر یک اینتر فرومتر فعال است و می توان به ان رادار اینترفرومتر گفت. همچنین به آن رادار مقایسه گر فاز همزمان و یا مقایسه گر فاز تک پالسی هم گفته شده است. در این جا نامگذاری دوم به کار می رود.
در شکل (۶-۳) دو آنتن با فاصله d نشان داده شده است. فاصله هدف ازآنتن R می باشد که فرض میشود خیلی بزرگتر از فاصله D باشد خط دید هدف با عمود منصف خط اتصال دو آنتن زاویه می سازد.
فاصله هدف از آنتن ۱ برابر است با:
و فاصله آن از آنتی ۲ برابر است با:
اختلاف فاز بین دو سیگنال برگشتنی در دو آنتن تقریباً برابر است با:
با توجه به آنکه برای زوایای کوچک می باشد و لذا برای زوایای کوچک اختلاف فاز تابع خطی از خطای زاویه است که می توان آن را برای کنترل سروها برای تعیین موقعیت آنتنها به کار برد.
شکل (۶-۳) رابطه فاز جبهه موج در رادار تک پالس مقایسه گر فاز
در نسل های اولیه رادار تک پالس مقایسه گر فاز خطای زاویه ای با اندازه گیری اختلاف فاز خروجی گیرنده های وصل شده به هر آنتی معین می شد و خروجی یکی از آنتن ها برای فرستندگی و فراهم کردن اطلاعات فاصله به کار می رفت.
با این ترکیب ایجاد روشنائی دهانه متناسب و حفظ زاویه دید پایدار مشکل است. روش مناسب تر ایجاد پرتوهای مجموع و تفاضل در RF و پردازش سیگنال ها نظیر رادار مونو پالس مقایسه گر دامنه می باشد.
در هدایت موشکی که از اصل مقایسه گر فاز استفاده می کند اختلاف فاز بین دو آنتن ثابت با یک اختلاف فاز دهنده سرو کنترلی که در یکی از بازوها قرار می گیرد اندازه گیری میشود. حلقه سرو اختلاف فاز دهنده را طوری تنظیم می کند که اختلاف فاز دو کانال صفر گردد. مقدار فازی که برای صفر کردن سیگنال لازم است معیاری برای اندازه گیربی خطای زاویه ای است.
اصول مقایسه فاز و دامنه را میتوان در یک رادار برای ایجاد ردیابی زاویه ای دو بعدی با آنتی به کار برد. اطلاعات زاویه در یک صفحه (افق) با دو آنتن جداگانه که در کنار هم قرار گرفته اند را می توان با مقایسه گر فاز به دست آورد. یکی از شعاع ها کمی به سمت بالا و دیگری به سمت پائین کج شده تا بدین ترتیب تصویر افقی پرتوهای آنتن ها مربوط به مقاسه فاز و تصویر عمودی آنها مربوط به مقایسه گر دامنه است.
هر دو رادار تک پالسی مقایسه گر دامنه و فاز دو شعاع آنتن به کار می برند. (برای ردیابی یک بعدی). اندازه گیری توسط دو سیستم یکسان نیستک و مشخصات شعاع آنتن ها نیز متفاوت است. در تک پالس مقایسه گر دامنه دو شعاع منحرف شده هستند یکی در دو جهت کمی متفاوت قرار دارند. این نوع پرتو را می توان با استفاده از یک منعکس کننده با دو بوق تغذیه در کنار هم ایجاد نمود. چون تغذیه ها باید در کنار هم باشند فاصله انها می تواند نصف طول موج انتخاب گرددد. بااین فاصله نزدیکی اختلاف فاز سیگنال های دریافتی دو تغذیه بسیار کوچک خواهد بود. هر اختلاف در دامنه بین خروجی های دو آنتن در سیستم مقایسه گر دامنه به علت اختلاف در دامنه است و نه فاز. از طرف دیگ تک پالس مقایسه گر فاز فاز فقط اختلافات فاز را اندازه گیری می نماید و کاری به دامنه ندارد. بنابراین شعاع های آنتن های منحرف شده نیستند. بلکه هم جهت هستند. در اینجا آنتن های جداگانه باید به کار رود زیرا روشن کردن یک منعکس کننده با بیشتر از یک تغذیه برای ایجاد پرتوهای آنتنی مستقل و هم جهت که یک حجم یکسان از فضا را روشن می کند مشکل است.
اگرچه رادارهای ردیابی براساس اصل مقایسه گیری فاز ساخته و به کار گرفته شده است لیکن این تکنیک به وسعت بقیه روش ها به کار نرفته است. سیگنال مجموع دارای گلبرگ های فرعی بزرگتر است. چون فاصله بین مرکز فاز آنتن های جداگانه بزرگ است. مساله گلبرگ های فرعی بزرگ را می توان با روی قراردادن دهانه های آنتن ها کم کرد. با آنتن انعکاسی این عمل باعث کاهش حساسیت زاویه و بهره آنتن می گردد.
فصل چهارم
شبیه سازی رادار مونوپالس
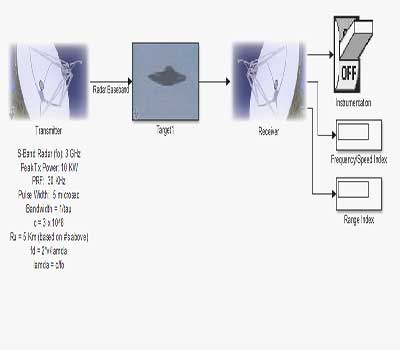
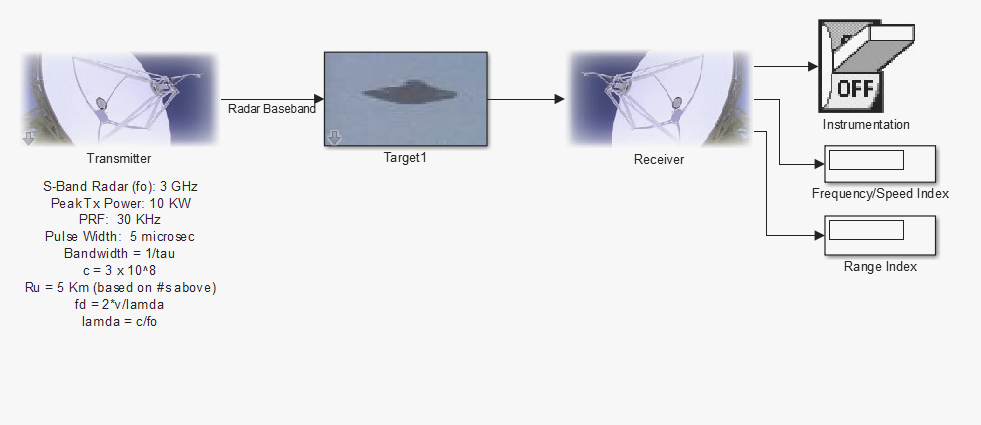
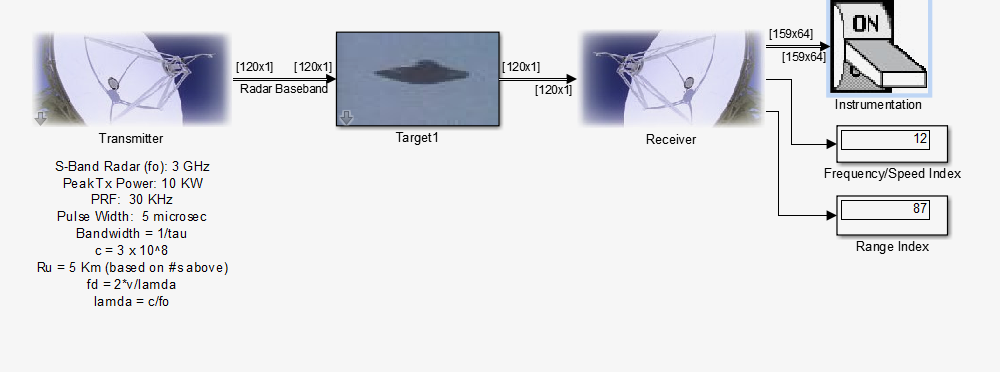
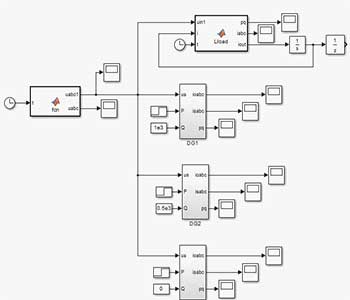
۱-۴-بلوک دیاگرام شبیه سازی رادار مونوپالس
به منظور برآورد عملکرد رادار به طریقی ساده و ارزان و در عین حال تا حد امکان دقیق، از شبیهسازی معمولاً به منظور برآورد کارآیی قسمتهای خاصی از رادار انجام میشود زیرا که شبیهسازی کل رادار به منظور برآورد تمام کارآیی آن بسیار مشکل و غیرعملی است.
شبیه سازی میتواند بصورت سخت افزار در حلقه و یا مجزا باشد. در اول مشخصات هدف، مسیر آن و اعمال اولیه رادار شبیه سازی شده و بقیه کار به کامپیوتر خود رادار و الگوریتم آن محول می شود درحالیکه در دومی علاوه بر مشخصات و مسیر هدف و اعمال راداری، الگوریتمهای رادار نیز روی یک کامپیوتر عمومی شبیهسازی می شود. ما در شبیه سازی راه دوم را انتخاب می کنیم و هدفمان نیز از شبیه سازی بررسی عملکرد رادار در شرایط خاص (مانند وجود پدیده چند مسیری و محیط جنگ الکترونیک) و بررسی میزان بهبود حاصل از تدابیر پیشنهادی می باشد. نمودار بلوکی مدل یک رادار مونوپالس، که بصورت خودکار هدف را تعقیب می کند در شکل زیر:
۲-۴-شبیهسازی مسیر هدف
اگر رادار در مبدأ مختصات در نظر بگیریم بردار موقعیت هدف:
و برد ار سرعت مماسی هدف:
و بردار سرعت شعاعی هدف:
و اندازه سرعت شعاعی هدف:
و زاویه ارتفاع هدف:
و زاویه سمت هدف:
و فرکانس داپلر هدف:
برای مثال برای ارتفاع ثابتh ،بر روی نیمساز صفحه X-Y به سمت رادار می آید( با سرعت ثابت و برد اولیه
۳-۴- شبیه سازی سیگنال دریافتی
برای کاهش نرخ نمونه برداری سیگنالها را در باند پایه شبیه سازی میکنیم.
اگرسیگنال باندRf را به صورت کلی:
در نظر بگیریم با توجه به معادله سیگنال دریافتی:
که در آن سیگنال دریافتی ، سیگنال ارسالی ، G نمره آنتن ، طول موج ، Z تأخیر رفت و برگشت سیگنال ، r فاصله هدف ، ضریب بازگشت مختلط:
فاز ، نشاندهنده آن است که در برخورد سیگنال به هدف علاوه بر تغییر سطح سیگنال ، فاز آن نیز تغییر می کند . رابط * برا ی یک هدف نقطهای ساکن نسبت به رادار صادق است برای یک هدف نقطهای متحرک :
به صورت بالا در میآورید و به طور کلی در باند پایه خواهیم داشت:
محاسبه عبارت فوق برای تعداد پیشنهادی منعکس کننده عملاً غیر ممکن خواهد بود. لذا بایستی آنرا حتی الامکان با فرضهای معقول ساده نمود.
در یک فاصله زمانی خیلی کوچک می توان فرض کرد : ثابت >=
دراین صورت با تعریف ،
داریم:
در رابطه فوق چندان به تغییرات خیلی جزئی حاکی نیست لذا در بازه زمانی کوچک یاد شده بعد از زمان t ، تأخیر را ثابت و برابر (برای تأخیر در زمان فرض میکنیم.
جمله به تغییرا ت z(t) حساستر است و z(t) را برای این جمله دقیقتر تخمین میزنیم:
که در آن شیفت داپلر هدف در لحظه می باشد که فرض می شود در بازه زمانی فوق ثابت است :
از آنجا که جمله برابر با می باشد لازم است مقدار با دقت طول موج بیان شود که این در عمل ممکن نیست . علاوه بر آن در جمله و یک کمیت مختلف با فاز نامعلوم است . بنابراین تنها میتوان این دو فاز را تصادفی با توزیع یکنواخت منظور نمود . جمله نیز مقدار ثابتی است که در فاز تصادفی حل میشود و در نهایت خواهیم داشت : **
که در آن فاز تصادفی با توزیع یکنواخت به جمله نسبت داده شده است . در فضا تعداد زیادی منعکس کننده داریم لذا فضا را به بخشهایی با فواصل مساوی در جهت z(تأخیر) ، v (شیفت داپلر) و (زاویه سمت) تقسیم می کنیم و منعکس کننده های هر بخشی را با هم جمع فازودی می کنیم تا برای هر بخش یک فازوری به دست آید :
که در آن ، الگوی زمانی ، هر پرتو آنتن مونوپالس و زوایای ارتفاع و سمتی هستند که محور پرتو نشان میدهد. r ضریب بازگشت مختلط در بخش بوده و برابراست با :
: اگر تعریف کنیم آنگاه رابطه ** به صورت روبرو در میآید: ***
رابطه *** در واقع وزن دهی ضریب بازگشت مختلط توسط الگوی آنتن می باشد . به عبارت دیگر میزان سیگنال برگشتی از هر سو ، توسط الگوی آنتن وزن دهی می شود . مناسب است که این رابطه برای کلاتر سطحی ، کلاتر جمعی ، چف و هدف به طور جداگانه محاسبه گردد و پس از تعیین در هر مورد حاصل را با هم جمع کرد . چون به ازای یک خاصی و برد معین (m معین) برای مقادیر مختلف n یک دنباله فرکانسی از سیگنال می باشد که با معلوم بودن توزیع آماری و طیف توان سیگنال می توان این دنباله را مستقیماً ایجاد نمود، پس لازم است توان متوسط سیگنال به دست آید. چون:
توان نمونه های را ابتدا به کلاتر سطحی و سپس کلاتر جمعی ، چف و هدف به دست میآوریم:
از داخل بیرون آمد زیرا که در یک برد معین ، کلاتر سطحی فقط در زاویه ارتفاع وجود دارد :
H : ارتفاع آنتن از سطح زمین و R شعاع مؤثر زمین است :
: شعاع واقعی زمین است.(km 6375=a)
با فرض ناهمبستگی بخشهای کلاتر در جهت سمت:
که در آن سطح مقطع راداری در سلول می باشد:
اگر کلاتر سطحی در جهت سمت همگن فرض شود ، بدین معنی که متوسط سطح مقطع راداری آن با تغییر زاویه سمت تغییر نکته داریم:
۲)
عبارت صرفاً به شکل نماد سمت آنتن بستگی دارد و در یک آنتن خاص مقدار ثابتی است، این مقدار ثابت را می نامیم:
که در آن r تفکیک در جهت برد و تفکیک در جهت زاویه سمت بوده و
افق دید رادار بوده و چگالی سطح مقطع راداری کلاتر دریا و زمین میباشد.
و با فرض همگن بودن کلاتر جسمی در جهت سمت داریم:
لذا:
تفکیک در جهت زاویه ارتفاع بوده و دانسیته سطح مقطع راداری بوده و مقادیر آن از نمودارها به دست می آید. لذا:
۳)
در رابطه فوق وزن دهی کلاتر حجمی توسط الگوی ارتفاع بوده و در واقع تقریبی از انتگرال می باشد.
عمده کلاتر حجمی کلاتر باران می باشد اگر ارتفاع از سطح زمین را X به نامیم:
بدین ترتیب با معلوم بودن طیف و توزیع کلاتر حجمی و توان آن در رابطه ایجاد دنباله فرکانسی میسر خواهد بود، برای هدف از آنجا که توسط یک نقطه از الگو سمت و ارتفاع آنتن روشن میشود داریم:
در اینجا دنباله است با توان متوسط می باشد که اگر هدف در بخش m ام واقع باشد : در غیر این صورت برای چف نیز در رابطه ۳ x چگالی سطح مقطع راداری چف میباشد و داریم:
اگر در بخش mg ام وجود داشته باشد:
اگر چف در بخش mg ام وجود نداشته باشد:
اکنون پس از ایجاد دنباله به محاسبه سیگنال دریافتی می پردازیم ، در یک رادار پالسی سیگنال مختلف باند پایه برابر است با : که پالسی مستطیلی با عرض z و دامنه واحد می باشد. لحظه ارسال زامین پالسی بوده و مقادیر حداقل برای تعداد پالسهایی که به طور همزمان در فیلتر MTI پردازش می شود ثابت می باشند لیکن در فرستنده مبتنی بر نوسانساز قدرت یا مگنترون عملاً این دو مقدار تغییرات جزئی خواهند داشت ، اگر پس از ارسال هر پالس فقط به بازگشت آن قبل از ارسال پالس بعدی توجه کنیم : آنگاه رابطه …… به صورت زیر در میآید.
که در آن یک فاز تصادفی با میانگین دامنه واحد و فاز صفر فرض شده و نشاندهنده ناپایداری فرستنده است و توان پالسهای ارسالی تضعیف سیگنال را تا قبل از طبقه اول گیرنده در ضریب لحاظ می کنیم. لذا:
که p توان موج حامل در خلال ارسال پالس و L ضریب تضعیف:
توان میباشد. همچنین در رابطه لحظه ارسال پالس زمان سپری شده از ارسال هرپالس میباشد . در این رابطه ،جمله برای پالسهای متوالی مربوط به یک برد خاص و فرکانس معین مقدار ثابت است .برای شبیه سازی سیگنال لازم است از آن در نقاط محدودی نمونه برداری کنیم لذا رابطه به صورت زیر میشود:
یک نکته مهم ان است که عبارت فوق میتواند برای یکنواخت یا غیر یکنواخت استفاده شود.
اکنون لازم است محدوده تغییرات هریک ازتغییرهای راتعیین کنیم.
اندیس پالسهای متوالی است واگرقرارباشددرپردازنده نمونه متوالی بطورهمزمان پردازش میشود،بایستی از ۱تاIتغییر کند وفاصله نمونه های متوالی هم باتوجه به نوع Prfطراحی شده معیین میگردد.
K,M به ترتیب اندیس تفکیکی در جهت برد و اندیس نمونه برداری دراین جهت میباشند و محدوده تغییرات آنها با توجه به برد مورد نظر برای شبیه سازی معیین و فاصله تفکیک و نمونه برداری در جهت برد با توجه به عرض پالسهای ارسالی مشخص میگردد،در شبیه سازی مناسب آن است که این دو فاصله به طور مساوی اختیار شودوکافی است در عرض هرپالس فقط دونمونه برداریم .
Nاندیس فرمانی بوده و باتوجه به طیف کلاتر وهدف تعیین میگردد،برای هدف با توجه به کوچک بودن پهنای طیف ان نسبت به عکس زمان پردازش Iپالس به طور همزمان بیان ان با یک نمونه در میدان فرکانس کافی خواهد بود ،در حالی که برای بیان طیف کلاتر به نمونههای بیشتری نیاز داریم ،گفتیم که برای نمونه برداری در جهت برد کافیست در فاصله هر پالس دو نمونه برداریم دراین صورت داریم:
و بدین ترتیب محاسبه سیگنال دریافتی تکمیل گردد.
۴-۴-شبیه سازی آنتن منو پالس :
همانطور که قبلا گفته شد آنتن رادار تعقیب مونو پالس ،که قادر است همزمان زوایای افقی وعمودی هدف را بدست آورد از چهار پرتو تشکیل شده است که هر یک از هر پرتو مجاور به اندازه زوایای انحراف (squnit angle) فاصله دارد. در این صورت زوایای افقی و عمودی یک هدف برابر میشوند با:
که در روابط فوق ، ،بهره ولتاژ پرتو ضریب تعقیب افقی وضریب تعقیب عمودی میباشد.
از آنجا که هر ۴ پرتو موجود در آنتن مشابه هستند کافی است یک پرتو را شبیه سازی کنیم و برای بدست اوردن برای یک هدف خاص،از زوایای به آن پرتو نگاه کنیم :
که در روابط فوق داریم :
I=aA,B,C,D
: زاویه سمت نسبت به یک پرتوخاص
: زاویه ارتفاع به یک زاویه خاص
:زاویه سمت نسبت به محور آنتن مونو پالس
:زاویه ارتفاع نسبت به محور آنتن مونو پالس
: نصف زاویه انحراف افق
: نصف زاویه انحراف عمودی
به منظور شبیه سازی یک پرتو ، می توان فرمول زیر را به عنوان الگوی ولتاژ نرمالیزه یک گلبرگ به کار برد:
که در آن :
F: الگویی ولتاژ بر حسب db(تابعی از) : مرز زاویه بالای گلبرگ
: زاویه دید نسبت به آنتن
: مرز زاویه پایین گلبرگ
M: دامنه ماکزیم برحسب db(برای گلبرگ اصلی صف)
C: ضریب شکل دهی
برای شبیه سازی یک پرتو ، با دانستن مشخصات گلبرگهای اصلی وفرعی(mووپهنای پرتو) میتوان هر گلبرگ را شبیه سازی کرد. c برای رسیدن به یک پهنای گلبرگ خاص انتخاب میشود. زاویه دید نسبت به محور پرتو بوده وبرابر است با:
که : زاویه سمت نسبت به محور پرتوiام
:زاویه ارتفاع نسبت به محور پرتو iام
پهنای پرتو نیم توان (db3)یک گلبرگ برابر است با:
در این صورت الگوی نرمالیزه توان برابر (برحسب dB ) خواهد شد و بهره ولتاژ بر حسب dB :
بهره توان ماکزیمم گلبرگ
تا اینجا مکانیسم یک پرتو با پهنای پرتو ، سطح و تعداد گلبرگ فرعی و مشخص را شبیه سازی کنیم . ولی نکته ای که باید به آن توجه کرد آن است که ما معمولاً مشخصات یک پرتو آنتن مونوپالس را نداریم بلکه مشخصات الگوهای مجموع و تفاضل به ما داده می شود . حال باید الگوی یک پرتو را آنچنان شبیه سازی کنیم که در نهایت به الگوی مجموع و تفاضل داده شده برسیم.
برای این کار از روش سعی و خطا ،پارامترهای پرتو مورد نظر را تغییری دهیم و اثر آن را روی الگوهای مجموع و تفاضل و نسبت این دو ( تابع خطا) بررسی نموده و آنقدر پارامترها را تغییر می دهیم تا به مشخصات دلخواه برسیم . از آنجا که زاویه انحراف معمولاً درمقایسه با پهنای گلبرگهای اولیه خیلی کوچک است می توان Al و Au و نیز شکل و ماکسیمم الگوی مجموع را به عنوان نقطه شروع ، برا ی پرتوی که می خواهیم پارامترهایش را با سعی و خطا به دست آوریم در نظر گرفت و در گام اول الگوی مجموع را برای پرتو مورد نظر شبیه سازی نمود . و بعد زاویه انحرافی در نظر گرفت و با تغییر c و Al و Au در نظر گرفته شده برای پرتو، سعی کرد که به الگوی مجموع دلخواه برسیم . باید توجه کرد که از سه پارامتر : زاویه ، شکل الگوی مجموع و شیب تابع خطا. دوتا مستقل هستند و از روی این دو می توان سومی را به دست آورد و دوتای دومی بیانگر دقت تعقیب رادار هم می باشند که معمولاً داده می شوند . در شکل زیر الگوی پرتو مجموع و تابع خطای آنتن رادار مورد بررسی شبیه سازی و رسم شده است.
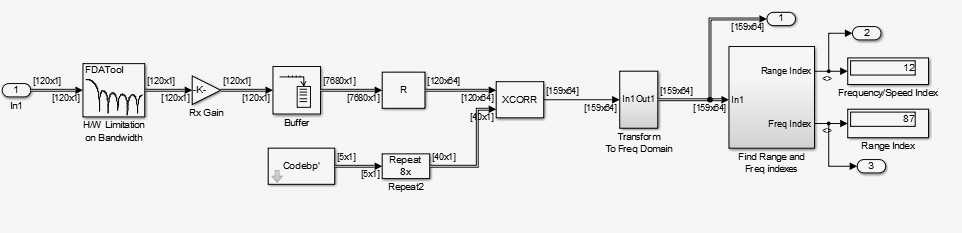
۵-۴-شبیه سازی گیرنده مجموع و تفاضل
بعد از اینکه سیگنال ورودی هر یک از ۴ پرتو آنتن رادریافت کردیم ،سه سیگنال ساخته میشوند :اینها ورودی های ۳ گیرنده ما هستند.
در گیرنده علاوه بر اضافه شدن نویز،آشکار سازی هم انجام میشود:
که دامنه نمونههای نویز سفید گوشی با توان هستند که در این صورت خواهیم داشت.
پس سیگنالهای به سروسیستمهای آنتن داده شده و سیگنالهای کانال مجموع هم بعد از آشکار سازی دامنه به مدار فاصله یاب داده میشود.
خروجی متلب :
لطفاً براي ارسال دیدگاه، ابتدا وارد حساب كاربري خود بشويد