
طراحی کنترلر تطبیقی با استفاده از پارامترهای نامعلوم سیستم همراه مقاله
طراحی کنترلر تطبیقی با استفاده از پارامترهای نامعلوم سیستم همراه مقاله:انجام پروژه متلب
انجام پروژه متلب:در حالت کلی ایده اصلی کنترل تطبیقی بدست آوردن یک عملکرد پایا در حضور عدم قطعیتها و تغییرات نامعلوم پلنت است. این گونه عدم قطعیتها در بسیاری از سیستمهای دینامیکی مانند رباتهای هنرمند و هواپیماهای آتش نشانی که تغییرات زیادی در جرم را تجربه میکنند و ماهوارههایی که با تغییر در ساختار خود در هر لحظه ممان اینرسی مختلفی دارند یا کوادروتوری که با حمل باری با جرم نامشخص دچار تغییر در مرکز جرم میشود، اتفاق خواهد افتاد.
در حالت کلی کنترل تطبیقی را میتوان در دو دسته کلی طبقه بندی نمود :
- کنترل تطبیقی فیدبک
- کنترل تطبیقی فیدفوروارد
همچنین نوع دیگری از طبقه بندی نیز وجود دارد :
- روش مستقیم
- روش غیر مستقیم
انجام پروژه متلب:در روش مستقیم پارامترهای تخمین زده شده مستقیماً به عنوان ضرایب کنترلر استفاده خواهند شد. در واقع پلنت سیستم بر اساس ضرایب کنترلر پارامتری سازی شده و در قسمت تخمین پارامترهای سیستم که همان ضرایب کنترلر هستند تخمین زده خواهد شد. در روش غیر مستقیم ابتدا پارامترهای پلنت تخمین زده شده و سپس ضرایب کنترلر بر اساس پارامترهای تخمین زده شده محاسبه خواهد شد. روشهای مختلفی برای کنترل تطبیقی فیدبک معرفی شده است :
- کنترلر تطبیقی دوآل (Dual Adaptive Controllers)
- کنترلر تطبیقی دوآل بهینه (Optimal Dual Controllers)
- کنترلر تطبیقی دوآل زیر بهینه (Suboptimal Dual Controllers)
- کنترلر تطبیقی غیر دوآل (Nondual Adaptive Controllers)
- جایابی قطب تطبیقی (Adaptive Pole Placement)
- جستجوی اکسترمم (Extremum Seeking Controllers)
- کنترل یادگیری تکراری (Iterative learning control)
- جدولبندی بهره (Gain scheduling)
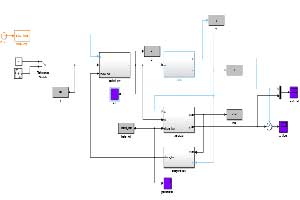
- کنترلر تطبیقی مدل مرجع (شکل زیر) (Model Reference Adaptive Controllers)
- کنترل تطبیقی شناسایی مدل (Model Identification Adaptive Controllers)
مقاله رفرنس:
Design and Analysis of a NovelL1Adaptive Control
Architecture With Guaranteed Transient Performance
Chengyu Cao and Naira Hovakimyan
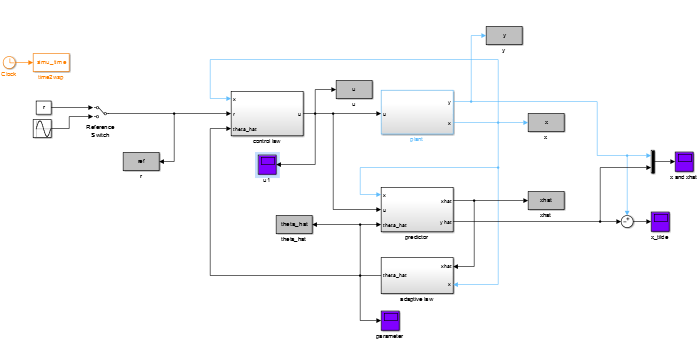
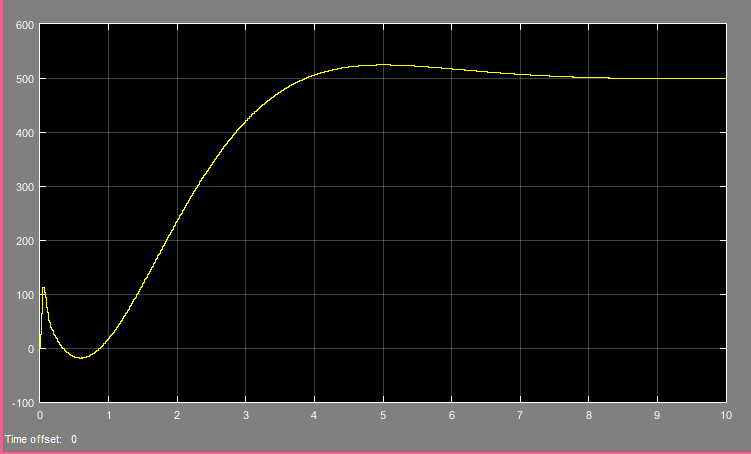
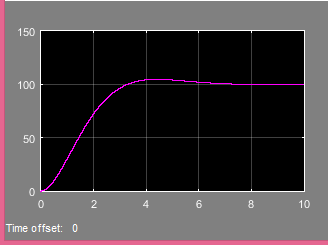
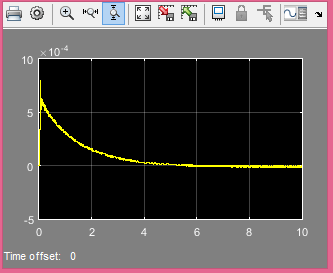
خروجی متلب:
انجام پروژه متلب
http://www.porojeamadematlab.ir
تنها وبسایت انجام پروژه متلب
انجام پروژه متلب
طراحی، کنترلر تطبیقی،پارامترهای نامعلوم، سیستم،مقاله شبیه سازی، متلب،پروژه متلب ،matlab،matlab project،adaptive control، انجام پروژه متلب

لطفاً براي ارسال دیدگاه، ابتدا وارد حساب كاربري خود بشويد